单片机学习小组
登录
直播中
潘飘稚
7年用户
889经验值
私信
关注
怎样通过定时器自动触发多路ADC进行电压电流的采集呢
开启该帖子的消息推送
ADC
电压电流
定时器
怎样通过定时器自动触发多路ADC进行电压电流的采集呢?并通过DMA传送数据到内存中去?
回帖
(1)
张龙
2022-3-1 09:29:47
在我们的电子设计中,经常需要对外部的模拟量进行采集,如一些传感器的输出量,电位器的旋转量等等,特别是电压电流的采集可以说是家常便饭,这些都离不开MCU最常用的外设,ADC,它可以将
模拟量转换为数字量,量化后给MCU进行处理
,稍微复杂一点的产品,往往需要多路模拟量采集,
今天结合实际案例,跟大家一起分享一个我经常用的方案之一,通过定时器自动触发多路ADC进行电压电流的采集,并通过DMA传送数据到内存,
在需要的时候,去内存读取数据并进行处理即可,小伙伴们,搞起来吧!
本次我们采集3路AD信号,一路电压,一路电流,还有一个电位器,方便观察数据。
硬件电路分析
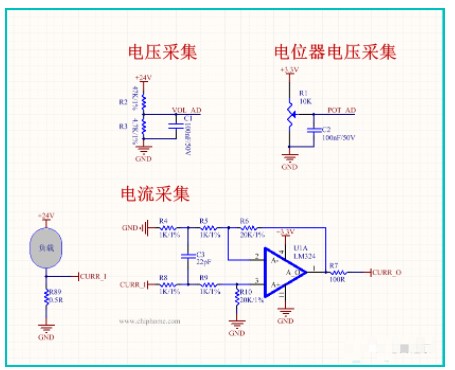
图1:AD多路采集
1、首先来看电压采集跟电位器(模拟传感器信号)的采集,24V的电源电压需要分压,这两个电压都足够高,所以直接送到MCU的AD引脚即可,
这里记得要并一个100nF的电容
,作用是存储电荷的,ADC在快速充放电的时候,这个电容可以起到补给的作用,另外也有滤波的作用,所以这个一定要加。
2、电流的采集,这里用了一个经典的差分放大电路,放大原理就不细说了,大概就是经过运放的
虚短,虚断
等特性,这里方便计算,一般取R4+R5=R8+R9,R6=R10,最终的传递函数位Vout=(CURR_I - GND)* R6/(R4+R5),
这里的放大倍数为10倍。
一般情况下,在将运算放大器的输入端连接到放大器,使用“反相”或“非反相”输入端放大单个输入信号,而另一个输入端接地,也是可以的,
只是只能放大一个电平
,这里用差分电路展示,上图的反向输入可以接其它电压,
有时候我们需要放大的电压两端电势没有一个接地的,
比如我们在母线电压输入端串联一个小电阻
,分别将电阻两边的电压送到差分放大器,就可以实现母线电流的采集了。
软件分析
这里以STM32F051来举例说明,STM32F051包含一个分辨率为12位的ADC模块,所以采样精度能达到Vref/4096,同时具有19个ADC通道,其中16个外部采样通道和3个内部信号源。
我们一般需要配置引脚,分辨率,数据对齐,触发方式,采样方式,扫描方式等等,这里有一个规则通道跟注入通道之分,注入就是可以插队的意思,有一些时序精度要求很高的场合会用,一般场合用规则通道即可。
关于通道组,这里有一个点需要注意的是,一个通道组转换完才会进入中断,并不是单个通道,又因为MCU内部只有一个ADC_DR,所以有部分同学在开始配置多通道后发现采集的数据都不对,其实我们这样记就行了,
如果是只采样一个通道,分单次转换模式跟连续转换模式(重复启动ADC),
如果是规则多通道的采集,我们必须要使用扫描模式,而且,这里一定要开启DMA功能
,DMA会在每个通道转换完之后,自动的把结果传到内存中。
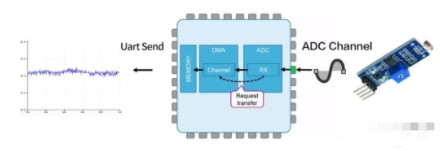
图2:DMA简易示图
关于DMA,大家应该都有过了解了,DMA控制器依赖于处理器内核,但DMA不影响总线传输,因为DMA控制器总是在系统总线空闲的时候使用总线。该总线实现处理器和DMA控制器之间最优化设计,使两者之间的冲突降到最低,因此传输性能得到提高。如上图所示,我们配置完DMA之后,
每次数据采集完毕,DMA会自动的帮MCU把数据运送到我们指定的内存空间,这个搬运不依赖于CPU时钟,所以也算是实现了并行操作,相比在主程序中开启采集,我们的MCU可以有更多的时间去计算运行别的东西。
关于触发,我们可以选择手动触发一次ADC采集,也可以通过定时器的中断去触发
,
这里强调一点,
如果只是利用定时器的更新事件去触发ADC,我们也没必要开启更新中断,定时器会源源不断的产生更新事件。
如果选择开启,可以在中断中执行一些操作,例如通过某些参数变化情况去改变AD采集的间隔时间。
我们采集3个通道的值,分别是通道4(VOL_AD)、通道11(CURR_O)、通道14(POT_AD)
下面上代码:
1、ADC IO 配置,配置为模拟输入
GPIO_InitTypeDef GPIO_InitStructure;
DMA_InitTypeDef DMA_InitStructure;
ADC_InitTypeDef ADC_InitStructure;
NVIC_InitTypeDef NVIC_InitStructure;
/*-------ADC GPIO配置---------*/
GPIO_InitStructure.GPIO_Pin = CURR_O | POT_AD;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AN; //模拟输入
GPIO_InitStructure.GPIO_PuPd = GPIO_PuPd_NOPULL;
GPIO_Init(GPIOC, &GPIO_InitStructure);
GPIO_InitStructure.GPIO_Pin = VOL_AD;
GPIO_Init(GPIOA, &GPIO_InitStructure);
2、DMA配置,配置3个通道,所以内存中定义一个结构体存储DMA搬运过来的值
adc_sample_t adc_data;
DMA_InitTypeDef DMA_InitStructure;
RCC_AHBPeriphClockCmd(RCC_AHBPeriph_DMA1,ENABLE); //DMA时钟开启
/*-------DMA配置AD采集---------*/
DMA_InitStructure.DMA_PeripheralBaseAddr = (uint32_t)&ADC1->DR;//外设基地,DMA搬运数据的地址
DMA_InitStructure.DMA_MemoryBaseAddr = (uint32_t)&adc_data;//内存基地址,DMA搬运数据放到内存的地址
DMA_InitStructure.DMA_DIR = DMA_DIR_PeripheralSRC;//外设到内存,源是外设
DMA_InitStructure.DMA_BufferSize = 3;//3个通道
DMA_InitStructure.DMA_PeripheralInc = DMA_PeripheralInc_Disable;//外设地址不变,不自增
DMA_InitStructure.DMA_MemoryInc = DMA_MemoryInc_Enable;//不同通道的数据,内存要自增
DMA_InitStructure.DMA_PeripheralDataSize = DMA_PeripheralDataSize_HalfWord;//外设数据16位
DMA_InitStructure.DMA_MemoryDataSize = DMA_MemoryDataSize_HalfWord;//内存数据16位
DMA_InitStructure.DMA_Mode = DMA_Mode_Circular;//DMA循环模式
DMA_InitStructure.DMA_Priority = DMA_Priority_Medium;//DMA优先级为中
DMA_InitStructure.DMA_M2M = DMA_M2M_Disable;//内存到内存失能
DMA_Init(DMA1_Channel1,&DMA_InitStructure);
/*--------------DMA中断配置-----------------*/
NVIC_InitStructure.NVIC_IRQChannel = DMA1_Channel1_IRQn;
NVIC_InitStructure.NVIC_IRQChannelPriority = 1;
NVIC_InitStructure.NVIC_IRQChannelCmd = ENABLE;
NVIC_Init(&NVIC_InitStructure);
DMA_ClearFlag(DMA1_FLAG_TC1);//清除传送完成中断标志
DMA_ITConfig(DMA1_Channel1,DMA_IT_TC,DISABLE);//中断先不打开
DMA_Cmd(DMA1_Channel1,ENABLE);
3、ADC配置,配置各项参数
/*-------ADC配置,用于采样电流,电压,电位器---------*/
ADC_JitterCmd(ADC1,ADC_JitterOff_PCLKDiv4,ENABLE);//移除时钟为PCLKDiv4时在触发到启动转换延迟中产生的抖动
RCC_ADCCLKConfig(RCC_ADCCLK_PCLK_Div4);//ADC时钟为PLCK的4分频。也就是12MHz
ADC_InitStructure.ADC_Resolution = ADC_Resolution_12b;//ADC的位数。这里选择12位
ADC_InitStructure.ADC_ContinuousConvMode = DISABLE;//连续转换模式禁能
ADC_InitStructure.ADC_ExternalTrigConvEdge = ADC_ExternalTrigConvEdge_Falling;//触发沿为下降沿触发
ADC_InitStructure.ADC_ExternalTrigConv = ADC_ExternalTrigConv_T1_CC4;//ADC的触发源为定时器1的第四通道
ADC_InitStructure.ADC_DataAlign = ADC_DataAlign_Right;//数据对齐为右对齐
ADC_InitStructure.ADC_ScanDirection = ADC_ScanDirection_Upward;//通道的扫描方向,由小到大扫描
ADC_Init(ADC1, &ADC_InitStructure);
/*-------ADC通道及采样时间配置---------*/
ADC_ChannelConfig(ADC1,Vbus_VOLTAGE_CHANNEL, ADC_SampleTime_7_5Cycles);
ADC_ChannelConfig(ADC1,Bridge_CURRENT_CHANNEL, ADC_SampleTime_7_5Cycles);
ADC_ChannelConfig(ADC1,ELE_GUN_CHANNEL, ADC_SampleTime_7_5Cycles);
/*-------使用ADC前需要先校准---------*/
ADC_GetCalibrationFactor(ADC1);
ADC_Cmd(ADC1, ENABLE);
/*-------------等待ADC准备好--------------*/
while(!ADC_GetFlagStatus(ADC1, ADC_FLAG_ADRDY));
/*-------------使能ADC的DMA传输功能--------------*/
ADC_DMACmd(ADC1,ENABLE);
/*-------------ADC的DMA模式配置--------------*/
ADC_DMARequestModeConfig(ADC1,ADC_DMAMode_Circular);
ADC_StartOfConversion(ADC1);//开始转换
4、定时器配置,这里只开启通道4的下降沿触发ADC执行一次采集,想要更改采集的时间间隔更改通道4的占空比TIM1->CCR4即可。
/*------------------结构体变量---------------------*/
GPIO_InitTypeDef GPIO_InitStructure;
TIM_TimeBaseInitTypeDef TIM_TimeBaseStructure;
TIM_OCInitTypeDef TIM_OCInitStructure;
NVIC_InitTypeDef NVIC_InitStructure;
/*------------定时器时钟开启---------------------*/
RCC_APB2PeriphClockCmd(RCC_APB2Periph_TIM1, ENABLE);
/*-------PWM GPIO配置---------*/
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_11;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF;
GPIO_InitStructure.GPIO_OType = GPIO_OType_PP;
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_InitStructure.GPIO_PuPd = GPIO_PuPd_NOPULL;
GPIO_Init(GPIOA, &GPIO_InitStructure);
/*---------PWM复用引脚---------*/
GPIO_PinAFConfig(GPIOA, GPIO_PinSource11, GPIO_AF_2);
/*-------PWM时基配置---------*/
TIM_TimeBaseStructure.TIM_Prescaler= 0;
TIM_TimeBaseStructure.TIM_CounterMode= TIM_CounterMode_Up;
TIM_TimeBaseStructure.TIM_Period= 3199;//频率为15K,TIM1_Period = (SystemCoreClock / Frequnecy) - 1
TIM_TimeBaseStructure.TIM_ClockDivision= 0;
TIM_TimeBaseStructure.TIM_RepetitionCounter= 0;
TIM_TimeBaseInit(TIM1, &TIM_TimeBaseStructure);
/*-------PWM配置---------*/
TIM_OCInitStructure.TIM_OCMode = TIM_OCMode_PWM1;//PWM模式一
TIM_OCInitStructure.TIM_OutputState = TIM_OutputState_Enable;//输出使能,可以在通道4引脚看到占空比波形
TIM_OCInitStructure.TIM_OutputNState = TIM_OutputNState_Disable;//互补通道输出禁能
TIM_OCInitStructure.TIM_OCPolarity = TIM_OCPolarity_High;//有效电平为高
TIM_OCInitStructure.TIM_OCNPolarity = TIM_OCNPolarity_High;//互补通道有效电平为高
TIM_OCInitStructure.TIM_OCIdleState = TIM_OCIdleState_Set;//空闲时输出高
TIM_OCInitStructure.TIM_OCNIdleState = TIM_OCNIdleState_Set;//互补通道空闲时输出高
/*---------初始化触发AD采样的时间---------*/
TIM_OCInitStructure.TIM_Pulse = 100; //占空比
TIM_OC4Init(TIM1, &TIM_OCInitStructure);
/*------------通道4触发中断使能---------------*/
TIM_ITConfig(TIM1,TIM_IT_CC4,ENABLE);
NVIC_InitStructure.NVIC_IRQChannel = TIM1_CC_IRQn;
NVIC_InitStructure.NVIC_IRQChannelPriority = 2;
NVIC_InitStructure.NVIC_IRQChannelCmd = ENABLE;
NVIC_Init(&NVIC_InitStructure);
/*--------初始化先关闭定时器------------*/
TIM_Cmd(TIM1,DISABLE);
/*--------使能PWM输出------------*/
TIM_CtrlPWMOutputs(TIM1,ENABLE);
5、DMA中断,AD采集完一组数据,进入DMA中断
void DMA1_Channel1_IRQHandler(void)
{
uint32_t adc_value;
adc_value= adc_data.vol;
Flag.voltage = adc_value;//电压值
adc_value= adc_data.curr_o;
Flag.current = adc_value;//电流值
adc_value= adc_data.pot;
Flag.pot = adc_value;//电位器值
DMA_ClearFlag(DMA1_FLAG_TC1);
}
6、定时器中断,可以不加,这里展示一下
void TIM1_CC_IRQHandler(void)
{
if(TIM_GetITStatus(TIM1, TIM_IT_CC4) != RESET)
{
TIM_ClearITPendingBit(TIM1, TIM_IT_CC4);
TIM1->CCR4 = 500; //这里可以更改ADC的采集间隔
}
}
7、头文件
#ifndef __ADC_H
#define __ADC_H
#include "stm32f0xx.h"
/*-----------ADC宏定义---------------*/
#define ADC_POARTC GPIOC
#define CURR_O GPIO_Pin_1
#define POT_AD GPIO_Pin_4
#define ADC_POARTA GPIOA
#define VOL_AD GPIO_Pin_4
#define CURR_O_CHANNEL ADC_Channel_11
#define POT_CHANNEL ADC_Channel_14
#define VOL_CHANNEL ADC_Channel_4
/*---------结构体定义-----------*/
typedef struct
{
uint16_t vol;
uint16_t curr_o;
uint16_t pot;
}adc_sample_t;
extern adc_sample_t adc_data;
void ADC_DMA_Init(void);
#endif /* __ADC_H */
8、主程序中,全部初始化并且开启后,只需要从内存中读取三个值就可以了,想要更改采样的间隔时间就更改定时器1中通道4的占空比值。
/*
* main.c
*
* Created on: 20171229
* @Author:
* @version V1.0.0
* ,%%%%%%%%,
* ,%%/%%%%/%%
* ,%%%c''''J/%%%
* %. %%%%/ o o %%%
* `%%. %%%% |%%%
* `%% `%%%%(__Y__)%%'
* // ;%%%%`-/%%%'
* (( / `%%%%%%%'
* \ .' |
* \ / | |
* \/ ) | |
* /_ | |__
* (____________))))))) ¹¥³Çʨ
*
*/
float voltage, current;
int main(void)
{
//一系列初始化后
//.....
//DMA中断使能
DMA_ITConfig(DMA1_Channel1,DMA_IT_TC,ENABLE);
//定时器1使能
TIM_Cmd(TIM1,ENABLE);
printf("HELLO ADCrn");
while (1)
{
voltage = Flag.voltage / 112.84f; // (Flag.voltage*3.3*51.7)/(4096*4.7)
current = Flag.current / 4965; //Flag.motor_current*((3.3/4096)/10)/0.4
pot = Flag.pot / 1241; //Flag.pot*3.3/4096
//数据处理
//...
}
}
到这里,我们在配置好之后,
基本上就不用管了
,需要的时候就读取内存中数据的值就可以了,
一切基本都是自动完成的,我们的主程序可以干更重要的事情
。关于数据,这里只是展示一下,计算出的都是单次采集一组的值,大家可以根据自己的实际场景进行一些算法处理,如
平均值采样法、递推平均值采样法
等等。
在我们的电子设计中,经常需要对外部的模拟量进行采集,如一些传感器的输出量,电位器的旋转量等等,特别是电压电流的采集可以说是家常便饭,这些都离不开MCU最常用的外设,ADC,它可以将
模拟量转换为数字量,量化后给MCU进行处理
,稍微复杂一点的产品,往往需要多路模拟量采集,
今天结合实际案例,跟大家一起分享一个我经常用的方案之一,通过定时器自动触发多路ADC进行电压电流的采集,并通过DMA传送数据到内存,
在需要的时候,去内存读取数据并进行处理即可,小伙伴们,搞起来吧!
本次我们采集3路AD信号,一路电压,一路电流,还有一个电位器,方便观察数据。
硬件电路分析
图1:AD多路采集
1、首先来看电压采集跟电位器(模拟传感器信号)的采集,24V的电源电压需要分压,这两个电压都足够高,所以直接送到MCU的AD引脚即可,
这里记得要并一个100nF的电容
,作用是存储电荷的,ADC在快速充放电的时候,这个电容可以起到补给的作用,另外也有滤波的作用,所以这个一定要加。
2、电流的采集,这里用了一个经典的差分放大电路,放大原理就不细说了,大概就是经过运放的
虚短,虚断
等特性,这里方便计算,一般取R4+R5=R8+R9,R6=R10,最终的传递函数位Vout=(CURR_I - GND)* R6/(R4+R5),
这里的放大倍数为10倍。
一般情况下,在将运算放大器的输入端连接到放大器,使用“反相”或“非反相”输入端放大单个输入信号,而另一个输入端接地,也是可以的,
只是只能放大一个电平
,这里用差分电路展示,上图的反向输入可以接其它电压,
有时候我们需要放大的电压两端电势没有一个接地的,
比如我们在母线电压输入端串联一个小电阻
,分别将电阻两边的电压送到差分放大器,就可以实现母线电流的采集了。
软件分析
这里以STM32F051来举例说明,STM32F051包含一个分辨率为12位的ADC模块,所以采样精度能达到Vref/4096,同时具有19个ADC通道,其中16个外部采样通道和3个内部信号源。
我们一般需要配置引脚,分辨率,数据对齐,触发方式,采样方式,扫描方式等等,这里有一个规则通道跟注入通道之分,注入就是可以插队的意思,有一些时序精度要求很高的场合会用,一般场合用规则通道即可。
关于通道组,这里有一个点需要注意的是,一个通道组转换完才会进入中断,并不是单个通道,又因为MCU内部只有一个ADC_DR,所以有部分同学在开始配置多通道后发现采集的数据都不对,其实我们这样记就行了,
如果是只采样一个通道,分单次转换模式跟连续转换模式(重复启动ADC),
如果是规则多通道的采集,我们必须要使用扫描模式,而且,这里一定要开启DMA功能
,DMA会在每个通道转换完之后,自动的把结果传到内存中。
图2:DMA简易示图
关于DMA,大家应该都有过了解了,DMA控制器依赖于处理器内核,但DMA不影响总线传输,因为DMA控制器总是在系统总线空闲的时候使用总线。该总线实现处理器和DMA控制器之间最优化设计,使两者之间的冲突降到最低,因此传输性能得到提高。如上图所示,我们配置完DMA之后,
每次数据采集完毕,DMA会自动的帮MCU把数据运送到我们指定的内存空间,这个搬运不依赖于CPU时钟,所以也算是实现了并行操作,相比在主程序中开启采集,我们的MCU可以有更多的时间去计算运行别的东西。
关于触发,我们可以选择手动触发一次ADC采集,也可以通过定时器的中断去触发
,
这里强调一点,
如果只是利用定时器的更新事件去触发ADC,我们也没必要开启更新中断,定时器会源源不断的产生更新事件。
如果选择开启,可以在中断中执行一些操作,例如通过某些参数变化情况去改变AD采集的间隔时间。
我们采集3个通道的值,分别是通道4(VOL_AD)、通道11(CURR_O)、通道14(POT_AD)
下面上代码:
1、ADC IO 配置,配置为模拟输入
GPIO_InitTypeDef GPIO_InitStructure;
DMA_InitTypeDef DMA_InitStructure;
ADC_InitTypeDef ADC_InitStructure;
NVIC_InitTypeDef NVIC_InitStructure;
/*-------ADC GPIO配置---------*/
GPIO_InitStructure.GPIO_Pin = CURR_O | POT_AD;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AN; //模拟输入
GPIO_InitStructure.GPIO_PuPd = GPIO_PuPd_NOPULL;
GPIO_Init(GPIOC, &GPIO_InitStructure);
GPIO_InitStructure.GPIO_Pin = VOL_AD;
GPIO_Init(GPIOA, &GPIO_InitStructure);
2、DMA配置,配置3个通道,所以内存中定义一个结构体存储DMA搬运过来的值
adc_sample_t adc_data;
DMA_InitTypeDef DMA_InitStructure;
RCC_AHBPeriphClockCmd(RCC_AHBPeriph_DMA1,ENABLE); //DMA时钟开启
/*-------DMA配置AD采集---------*/
DMA_InitStructure.DMA_PeripheralBaseAddr = (uint32_t)&ADC1->DR;//外设基地,DMA搬运数据的地址
DMA_InitStructure.DMA_MemoryBaseAddr = (uint32_t)&adc_data;//内存基地址,DMA搬运数据放到内存的地址
DMA_InitStructure.DMA_DIR = DMA_DIR_PeripheralSRC;//外设到内存,源是外设
DMA_InitStructure.DMA_BufferSize = 3;//3个通道
DMA_InitStructure.DMA_PeripheralInc = DMA_PeripheralInc_Disable;//外设地址不变,不自增
DMA_InitStructure.DMA_MemoryInc = DMA_MemoryInc_Enable;//不同通道的数据,内存要自增
DMA_InitStructure.DMA_PeripheralDataSize = DMA_PeripheralDataSize_HalfWord;//外设数据16位
DMA_InitStructure.DMA_MemoryDataSize = DMA_MemoryDataSize_HalfWord;//内存数据16位
DMA_InitStructure.DMA_Mode = DMA_Mode_Circular;//DMA循环模式
DMA_InitStructure.DMA_Priority = DMA_Priority_Medium;//DMA优先级为中
DMA_InitStructure.DMA_M2M = DMA_M2M_Disable;//内存到内存失能
DMA_Init(DMA1_Channel1,&DMA_InitStructure);
/*--------------DMA中断配置-----------------*/
NVIC_InitStructure.NVIC_IRQChannel = DMA1_Channel1_IRQn;
NVIC_InitStructure.NVIC_IRQChannelPriority = 1;
NVIC_InitStructure.NVIC_IRQChannelCmd = ENABLE;
NVIC_Init(&NVIC_InitStructure);
DMA_ClearFlag(DMA1_FLAG_TC1);//清除传送完成中断标志
DMA_ITConfig(DMA1_Channel1,DMA_IT_TC,DISABLE);//中断先不打开
DMA_Cmd(DMA1_Channel1,ENABLE);
3、ADC配置,配置各项参数
/*-------ADC配置,用于采样电流,电压,电位器---------*/
ADC_JitterCmd(ADC1,ADC_JitterOff_PCLKDiv4,ENABLE);//移除时钟为PCLKDiv4时在触发到启动转换延迟中产生的抖动
RCC_ADCCLKConfig(RCC_ADCCLK_PCLK_Div4);//ADC时钟为PLCK的4分频。也就是12MHz
ADC_InitStructure.ADC_Resolution = ADC_Resolution_12b;//ADC的位数。这里选择12位
ADC_InitStructure.ADC_ContinuousConvMode = DISABLE;//连续转换模式禁能
ADC_InitStructure.ADC_ExternalTrigConvEdge = ADC_ExternalTrigConvEdge_Falling;//触发沿为下降沿触发
ADC_InitStructure.ADC_ExternalTrigConv = ADC_ExternalTrigConv_T1_CC4;//ADC的触发源为定时器1的第四通道
ADC_InitStructure.ADC_DataAlign = ADC_DataAlign_Right;//数据对齐为右对齐
ADC_InitStructure.ADC_ScanDirection = ADC_ScanDirection_Upward;//通道的扫描方向,由小到大扫描
ADC_Init(ADC1, &ADC_InitStructure);
/*-------ADC通道及采样时间配置---------*/
ADC_ChannelConfig(ADC1,Vbus_VOLTAGE_CHANNEL, ADC_SampleTime_7_5Cycles);
ADC_ChannelConfig(ADC1,Bridge_CURRENT_CHANNEL, ADC_SampleTime_7_5Cycles);
ADC_ChannelConfig(ADC1,ELE_GUN_CHANNEL, ADC_SampleTime_7_5Cycles);
/*-------使用ADC前需要先校准---------*/
ADC_GetCalibrationFactor(ADC1);
ADC_Cmd(ADC1, ENABLE);
/*-------------等待ADC准备好--------------*/
while(!ADC_GetFlagStatus(ADC1, ADC_FLAG_ADRDY));
/*-------------使能ADC的DMA传输功能--------------*/
ADC_DMACmd(ADC1,ENABLE);
/*-------------ADC的DMA模式配置--------------*/
ADC_DMARequestModeConfig(ADC1,ADC_DMAMode_Circular);
ADC_StartOfConversion(ADC1);//开始转换
4、定时器配置,这里只开启通道4的下降沿触发ADC执行一次采集,想要更改采集的时间间隔更改通道4的占空比TIM1->CCR4即可。
/*------------------结构体变量---------------------*/
GPIO_InitTypeDef GPIO_InitStructure;
TIM_TimeBaseInitTypeDef TIM_TimeBaseStructure;
TIM_OCInitTypeDef TIM_OCInitStructure;
NVIC_InitTypeDef NVIC_InitStructure;
/*------------定时器时钟开启---------------------*/
RCC_APB2PeriphClockCmd(RCC_APB2Periph_TIM1, ENABLE);
/*-------PWM GPIO配置---------*/
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_11;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF;
GPIO_InitStructure.GPIO_OType = GPIO_OType_PP;
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_InitStructure.GPIO_PuPd = GPIO_PuPd_NOPULL;
GPIO_Init(GPIOA, &GPIO_InitStructure);
/*---------PWM复用引脚---------*/
GPIO_PinAFConfig(GPIOA, GPIO_PinSource11, GPIO_AF_2);
/*-------PWM时基配置---------*/
TIM_TimeBaseStructure.TIM_Prescaler= 0;
TIM_TimeBaseStructure.TIM_CounterMode= TIM_CounterMode_Up;
TIM_TimeBaseStructure.TIM_Period= 3199;//频率为15K,TIM1_Period = (SystemCoreClock / Frequnecy) - 1
TIM_TimeBaseStructure.TIM_ClockDivision= 0;
TIM_TimeBaseStructure.TIM_RepetitionCounter= 0;
TIM_TimeBaseInit(TIM1, &TIM_TimeBaseStructure);
/*-------PWM配置---------*/
TIM_OCInitStructure.TIM_OCMode = TIM_OCMode_PWM1;//PWM模式一
TIM_OCInitStructure.TIM_OutputState = TIM_OutputState_Enable;//输出使能,可以在通道4引脚看到占空比波形
TIM_OCInitStructure.TIM_OutputNState = TIM_OutputNState_Disable;//互补通道输出禁能
TIM_OCInitStructure.TIM_OCPolarity = TIM_OCPolarity_High;//有效电平为高
TIM_OCInitStructure.TIM_OCNPolarity = TIM_OCNPolarity_High;//互补通道有效电平为高
TIM_OCInitStructure.TIM_OCIdleState = TIM_OCIdleState_Set;//空闲时输出高
TIM_OCInitStructure.TIM_OCNIdleState = TIM_OCNIdleState_Set;//互补通道空闲时输出高
/*---------初始化触发AD采样的时间---------*/
TIM_OCInitStructure.TIM_Pulse = 100; //占空比
TIM_OC4Init(TIM1, &TIM_OCInitStructure);
/*------------通道4触发中断使能---------------*/
TIM_ITConfig(TIM1,TIM_IT_CC4,ENABLE);
NVIC_InitStructure.NVIC_IRQChannel = TIM1_CC_IRQn;
NVIC_InitStructure.NVIC_IRQChannelPriority = 2;
NVIC_InitStructure.NVIC_IRQChannelCmd = ENABLE;
NVIC_Init(&NVIC_InitStructure);
/*--------初始化先关闭定时器------------*/
TIM_Cmd(TIM1,DISABLE);
/*--------使能PWM输出------------*/
TIM_CtrlPWMOutputs(TIM1,ENABLE);
5、DMA中断,AD采集完一组数据,进入DMA中断
void DMA1_Channel1_IRQHandler(void)
{
uint32_t adc_value;
adc_value= adc_data.vol;
Flag.voltage = adc_value;//电压值
adc_value= adc_data.curr_o;
Flag.current = adc_value;//电流值
adc_value= adc_data.pot;
Flag.pot = adc_value;//电位器值
DMA_ClearFlag(DMA1_FLAG_TC1);
}
6、定时器中断,可以不加,这里展示一下
void TIM1_CC_IRQHandler(void)
{
if(TIM_GetITStatus(TIM1, TIM_IT_CC4) != RESET)
{
TIM_ClearITPendingBit(TIM1, TIM_IT_CC4);
TIM1->CCR4 = 500; //这里可以更改ADC的采集间隔
}
}
7、头文件
#ifndef __ADC_H
#define __ADC_H
#include "stm32f0xx.h"
/*-----------ADC宏定义---------------*/
#define ADC_POARTC GPIOC
#define CURR_O GPIO_Pin_1
#define POT_AD GPIO_Pin_4
#define ADC_POARTA GPIOA
#define VOL_AD GPIO_Pin_4
#define CURR_O_CHANNEL ADC_Channel_11
#define POT_CHANNEL ADC_Channel_14
#define VOL_CHANNEL ADC_Channel_4
/*---------结构体定义-----------*/
typedef struct
{
uint16_t vol;
uint16_t curr_o;
uint16_t pot;
}adc_sample_t;
extern adc_sample_t adc_data;
void ADC_DMA_Init(void);
#endif /* __ADC_H */
8、主程序中,全部初始化并且开启后,只需要从内存中读取三个值就可以了,想要更改采样的间隔时间就更改定时器1中通道4的占空比值。
/*
* main.c
*
* Created on: 20171229
* @Author:
* @version V1.0.0
* ,%%%%%%%%,
* ,%%/%%%%/%%
* ,%%%c''''J/%%%
* %. %%%%/ o o %%%
* `%%. %%%% |%%%
* `%% `%%%%(__Y__)%%'
* // ;%%%%`-/%%%'
* (( / `%%%%%%%'
* \ .' |
* \ / | |
* \/ ) | |
* /_ | |__
* (____________))))))) ¹¥³Çʨ
*
*/
float voltage, current;
int main(void)
{
//一系列初始化后
//.....
//DMA中断使能
DMA_ITConfig(DMA1_Channel1,DMA_IT_TC,ENABLE);
//定时器1使能
TIM_Cmd(TIM1,ENABLE);
printf("HELLO ADCrn");
while (1)
{
voltage = Flag.voltage / 112.84f; // (Flag.voltage*3.3*51.7)/(4096*4.7)
current = Flag.current / 4965; //Flag.motor_current*((3.3/4096)/10)/0.4
pot = Flag.pot / 1241; //Flag.pot*3.3/4096
//数据处理
//...
}
}
到这里,我们在配置好之后,
基本上就不用管了
,需要的时候就读取内存中数据的值就可以了,
一切基本都是自动完成的,我们的主程序可以干更重要的事情
。关于数据,这里只是展示一下,计算出的都是单次采集一组的值,大家可以根据自己的实际场景进行一些算法处理,如
平均值采样法、递推平均值采样法
等等。
举报
更多回帖
rotate(-90deg);
回复
相关问答
ADC
电压电流
定时器
如何使用STM32F429
定时器
去
触发
ADC
采样
呢
2021-10-25
1455
定时器
触发
ADC
采样如何去实现
呢
2021-11-23
2791
请问如何用Cube生成
定时器
2
触发
双
ADC
同步
采集
并用DMA传输?
2022-02-28
968
定时器
事件在
触发
ADC
时有哪些时序上的差别
呢
2021-11-23
1153
怎样
去计算单片机的交流
电压电流
呢
2021-09-28
4026
如何实现
定时器
TIM3输出PWM波
触发
ADC
采样
呢
2022-01-25
1729
怎样
对光敏电阻
进行
ADC
的
采集
呢
2021-10-25
3100
如何对DAC的
定时器
触发
和DMA
进行
配置
呢
2021-11-15
2246
求助
电压电流
检测电路,用于单片机
采集
,求助求助
2013-07-22
16913
stm32 AD
定时器
触发
转换时的转换时间
2013-11-26
7897
发帖
登录/注册
20万+
工程师都在用,
免费
PCB检查工具
无需安装、支持浏览器和手机在线查看、实时共享
查看
点击登录
登录更多精彩功能!
首页
论坛版块
小组
免费开发板试用
ebook
直播
搜索
登录
×
20
完善资料,
赚取积分


 举报
举报



