1. AD7799概述
AD7799是ADI公司早期推出一款高精度低速率的ADC,性能参数如下
•均方根(RMS)噪声:
27 nV(4.17 Hz、AD7799)
65 nV(16.7 Hz、AD7799)
40 nV(4.17 Hz、AD7798)
85 nV(16.7 Hz、AD7798)
•功耗:380 µA(典型值)
•省电模式:最大1 µA
•低噪声可编程增益仪表放大器
•更新速率:4.17 Hz至470 Hz;3个差分输入(相比ADS1232多一个通道)
•内部时钟振荡器
•50 Hz/60 Hz同时抑制
•基准电压检测
•低端电源开关
•可编程数字输出
•熔断电流控制
•电源电压:2.7 V至5.25 V
•高达23.5个有效位
AD7799性价比很高,非常适用于静态变量的测试,如电子秤、应变计、气体分析、仪器仪表、压力传感器、血液分析、工业过程控制等应用。本人对AD7799做了一次比较测试,分享下测试的结果
2. 硬件设计分析
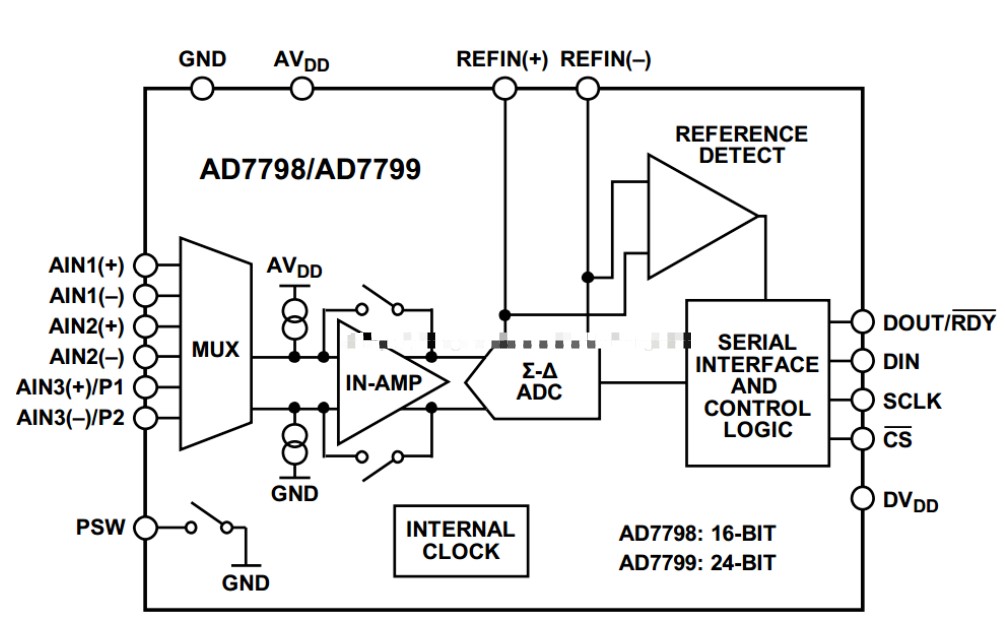
从结构图可以看出来,AD7799是模拟区域与数字区域完全独立的ADC,即AVDD给模拟区域供电,DVDD给数字区域供电,在原理图设计方面按照官方指导文档,需要对两个区域做独立的布线与隔离处理,才能让信噪比最佳。另可靠的基准电压是高精度ADC命根,本次试验选择TI公司推出的REF5025作基准参考,REF5025可低于3µVpp/V 噪声、3ppm/°C 漂移,性能是十分出色的。
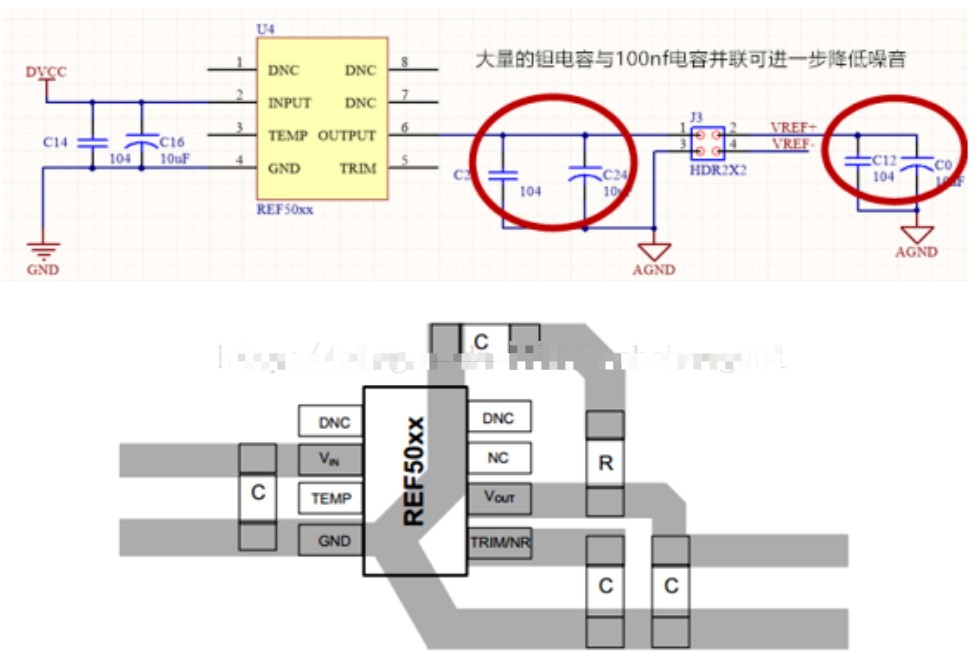
由于经常做高频类项目,十分讨厌杜邦线/飞线测试方式,在高精度的领域,24位ADC梯度值2的2416777216,如果接入基准电压是2.5v,理论分辨率可达到0.149μV,做过高频的工程师深知杜邦线的罪恶,根据上面的技术分析,哪怕线路被引入1μV的干扰,也可以让精度打上一定折扣。为了让ADS1232性能得以充分体现,特意做了一个测试载板,载板的设计也是很关键,分割模拟数字区域同时,连接地方大量使用钽电容做旁路电路,以把波纹抑制到最小,合理的布局与布线也很重要,敷铜区域也需要模数分离,以磁珠或者0-5R/电感隔开。
3. 时序图解说
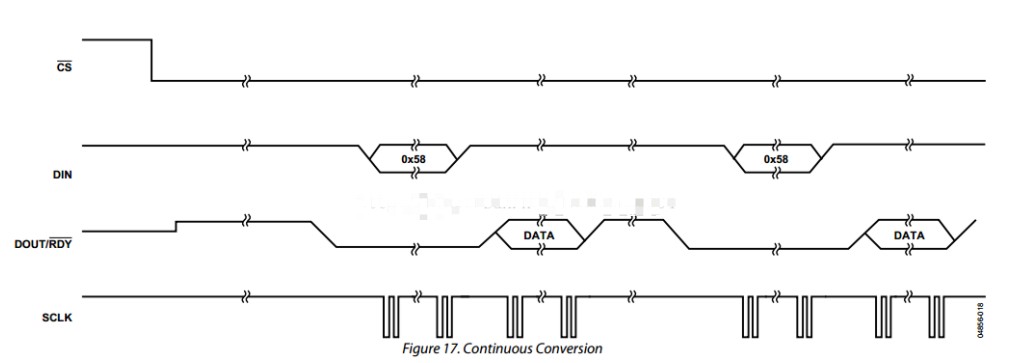
由时序图看出来,AD7799读写是简单的3线串行读数方式,属于Microwire串行接口,STM32的SPI接口可以
完美的与之匹配,当然也可以采用软仿SPI替代STM32的硬件SPI,这样的程序更具移植性。SPI时序实现也相对简单,
AD7799的CS线仅仅只是做片选使用(上图所示),而不用过多管理,保持低电平即可。特别需要注意的是在空闲时
候,SCLK时钟信号需要保持高电平,在SCLK半个周期当DIN接收到0x58后转换的数据才传入到DOUT总线,这时候
才能读取数据。
4. 核心源码
寄存器列表(官方)
#define AD7799_CS_LOW AD_CS_0()
#define AD7799_CS_HIGH AD_CS_1()
#define ADC_RDY_DAT (AD_DO)
/*AD7799 Registers*/
#define AD7799_REG_COMM 0 /* Communications Register(WO, 8-bit) */
#define AD7799_REG_STAT 0 /* Status Register (RO, 8-bit) */
#define AD7799_REG_MODE 1 /* Mode Register (RW, 16-bit */
#define AD7799_REG_CONF 2 /* Configuration Register (RW, 16-bit)*/
#define AD7799_REG_DATA 3 /* Data Register (RO, 16-/24-bit) */
#define AD7799_REG_ID 4 /* ID Register (RO, 8-bit) */
#define AD7799_REG_IO 5 /* IO Register (RO, 8-bit) */
#define AD7799_REG_OFFSET 6 /* Offset Register (RW, 24-bit */
#define AD7799_REG_FULLSALE 7 /* Full-Scale Register (RW, 24-bit */
/* Communications Register Bit Designations (AD7799_REG_COMM) */
#define AD7799_COMM_WEN (1 << 7) /* Write Enable */
#define AD7799_COMM_WRITE (0 << 6) /* Write Operation */
#define AD7799_COMM_READ (1 << 6) /* Read Operation */
#define AD7799_COMM_ADDR(x) (((x) & 0x7) << 3) /* Register Address */
#define AD7799_COMM_CREAD (1 << 2) /* Continuous Read of Data Register */
/* Status Register Bit Designations (AD7799_REG_STAT) */
#define AD7799_STAT_RDY (1 << 7) /* Ready */
#define AD7799_STAT_ERR (1 << 6) /* Error (Overrange, Underrange) */
#define AD7799_STAT_CH3 (1 << 2) /* Channel 3 */
#define AD7799_STAT_CH2 (1 << 1) /* Channel 2 */
#define AD7799_STAT_CH1 (1 << 0) /* Channel 1 */
/* Mode Register Bit Designations (AD7799_REG_MODE) */
#define AD7799_MODE_SEL(x) (((x) & 0x7) << 13) /* Operation Mode Select */
#define AD7799_MODE_PSW(x) (1 << 12) /* Power Switch Control Bit */
#define AD7799_MODE_RATE(x) ((x) & 0xF) /* Filter Update Rate Select */
/* AD7799_MODE_SEL(x) options */
#define AD7799_MODE_CONT 0 /* Continuous Conversion Mode */
#define AD7799_MODE_SINGLE 1 /* Single Conversion Mode */
#define AD7799_MODE_IDLE 2 /* Idle Mode */
#define AD7799_MODE_PWRDN 3 /* Power-Down Mode */
#define AD7799_MODE_CAL_INT_ZERO 4 /* Internal Zero-Scale Calibration */
#define AD7799_MODE_CAL_INT_FULL 5 /* Internal Full-Scale Calibration */
#define AD7799_MODE_CAL_SYS_ZERO 6 /* System Zero-Scale Calibration */
#define AD7799_MODE_CAL_SYS_FULL 7 /* System Full-Scale Calibration */
/* Configuration Register Bit Designations (AD7799_REG_CONF) */
#define AD7799_CONF_BO_EN (1 << 13) /* Burnout Current Enable */
#define AD7799_CONF_UNIPOLAR (1 << 12) /* Unipolar/Bipolar Enable */
#define AD7799_CONF_GAIN(x) (((x) & 0x7) << 8) /* Gain Select */
#define AD7799_CONF_REFDET(x) (((x) & 0x1) << 5) /* Reference detect function */
#define AD7799_CONF_BUF (1 << 4) /* Buffered Mode Enable */
#define AD7799_CONF_CHAN(x) ((x) & 0x7) /* Channel select */
/* AD7799_CONF_GAIN(x) options */
#define AD7799_GAIN_1 0
#define AD7799_GAIN_2 1
#define AD7799_GAIN_4 2
#define AD7799_GAIN_8 3
#define AD7799_GAIN_16 4
#define AD7799_GAIN_32 5
#define AD7799_GAIN_64 6
#define AD7799_GAIN_128 7
/* AD7799_CONF_REFDET(x) options */
#define AD7799_REFDET_ENA 1
#define AD7799_REFDET_DIS 0
/* AD7799_CONF_CHAN(x) options */
#define AD7799_CH_AIN1P_AIN1M 0 /* AIN1(+) - AIN1(-) */
#define AD7799_CH_AIN2P_AIN2M 1 /* AIN2(+) - AIN2(-) */
#define AD7799_CH_AIN3P_AIN3M 2 /* AIN3(+) - AIN3(-) */
#define AD7799_CH_AIN1M_AIN1M 3 /* AIN1(-) - AIN1(-) */
#define AD7799_CH_AVDD_MONITOR 7 /* AVDD Monitor */
/* ID Register Bit Designations (AD7799_REG_ID) */
#define AD7799_ID 0x9
#define AD7799_ID_MASK 0xF
/* IO (Excitation Current Sources) Register Bit Designations (AD7799_REG_IO) */
#define AD7799_IOEN (1 << 6)
#define AD7799_IO1(x) (((x) & 0x1) << 4)
#define AD7799_IO2(x) (((x) & 0x1) << 5)
初始化程序
unsigned char AD7799_Init(void)
{
unsigned char status = 0x1;
u32 ID=AD7799_GetRegisterValue(AD7799_REG_ID, 1);
if( (ID& 0x0F) != AD7799_ID)
{
status = 0x0;
}
return(status);
}
读取寄存器值
unsigned long AD7799_GetRegisterValue(unsigned char regAddress, unsigned char size)
{
unsigned char data[5] = {0x00, 0x00, 0x00, 0x00, 0x00};
unsigned long receivedData = 0x00;
data[0] = AD7799_COMM_READ | AD7799_COMM_ADDR(regAddress);
AD7799_CS_LOW;
SPI_Write(data,1);
SPI_Read(data,size);
AD7799_CS_HIGH;
if(size == 1)
{
receivedData += (data[0] << 0);
}
if(size == 2)
{
receivedData += (data[0] << 8);
receivedData += (data[1] << 0);
}
if(size == 3)
{
receivedData += (data[0] << 16);
receivedData += (data[1] << 8);
receivedData += (data[2] << 0);
}
return receivedData;
}
写寄存器
void AD7799_SetRegisterValue(unsigned char regAddress,
unsigned long regValue,
unsigned char size)
{
unsigned char data[5] = {0x03, 0x00, 0x00, 0x00, 0x00};
data[0] = AD7799_COMM_WRITE | AD7799_COMM_ADDR(regAddress);
if(size == 1)
{
data[1] = (unsigned char)regValue;
}
if(size == 2)
{
data[2] = (unsigned char)((regValue & 0x0000FF) >> 0);
data[1] = (unsigned char)((regValue & 0x00FF00) >> 8);
}
if(size == 3)
{
data[3] = (unsigned char)((regValue & 0x0000FF) >> 0);
data[2] = (unsigned char)((regValue & 0x00FF00) >> 8);
data[1] = (unsigned char)((regValue & 0xFF0000) >> 16);
}
AD7799_CS_LOW;
SPI_Write(data,(1 + size));
AD7799_CS_HIGH;
}
复位
void AD7799_Reset(void)
{
unsigned char dataToSend[5] = {0x03, 0xff, 0xff, 0xff, 0xff};
AD7799_CS_LOW;
SPI_Write(dataToSend,4);
AD7799_CS_HIGH;
}
初始化:
void AD7799_INIT(void)
{
unsigned long command;
command = AD7799_GetRegisterValue(AD7799_REG_CONF,2);
command &= ~AD7799_CONF_GAIN(0xFF);
command |= AD7799_CONF_GAIN(1); / 不使用内部PGA
AD7799_SetRegisterValue(AD7799_REG_CONF,command,2);
AD7799_SetReference();
command = AD7799_GetRegisterValue(AD7799_REG_CONF,2);
command &= ~AD7799_CONF_CHAN(0xFF);
command |= AD7799_CONF_CHAN(2); // 第三通道 AIN3+ —— AIN3-
AD7799_SetRegisterValue(AD7799_REG_CONF,command,2);
command = AD7799_GetRegisterValue(AD7799_REG_MODE,2);
command &= ~AD7799_MODE_SEL(0xFF);
command |= AD7799_MODE_SEL(0);// 连续转换模式
AD7799_SetRegisterValue(AD7799_REG_MODE,command,2);
}
5. 测试结果
测试条件Vref=2.5v(REF5025调理过后输出)、Gain=1、Updata Reat=4.17Hz
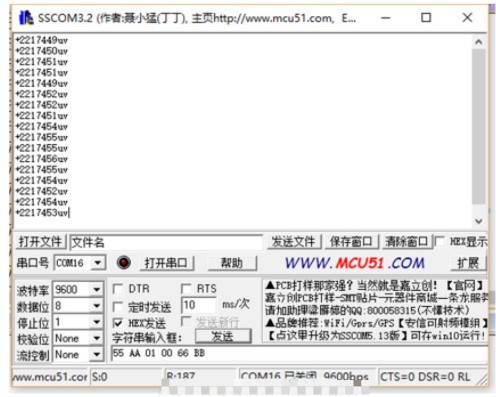
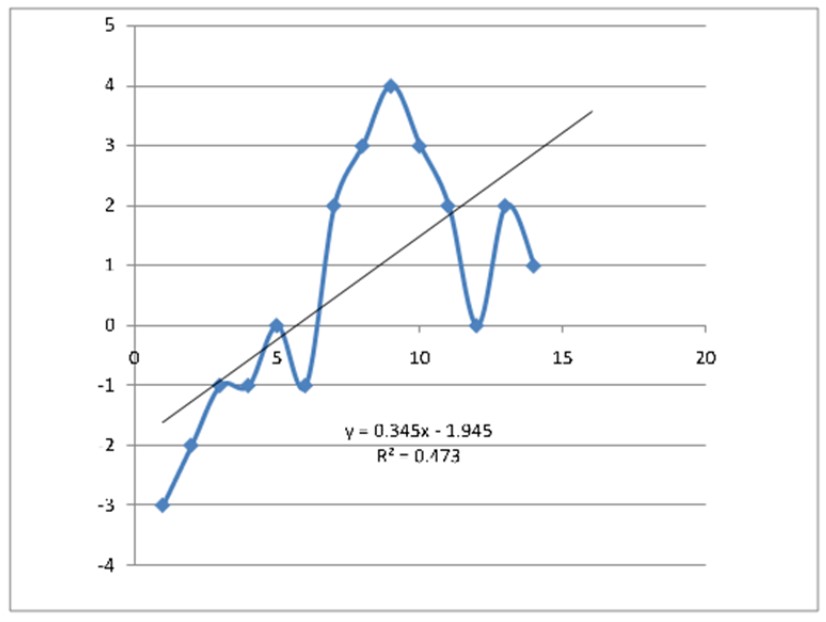
测试源是AVDD电阻分压后的电压值,实际加入电压是:2.217452v(8位半表实测),通过误差曲线的分析,
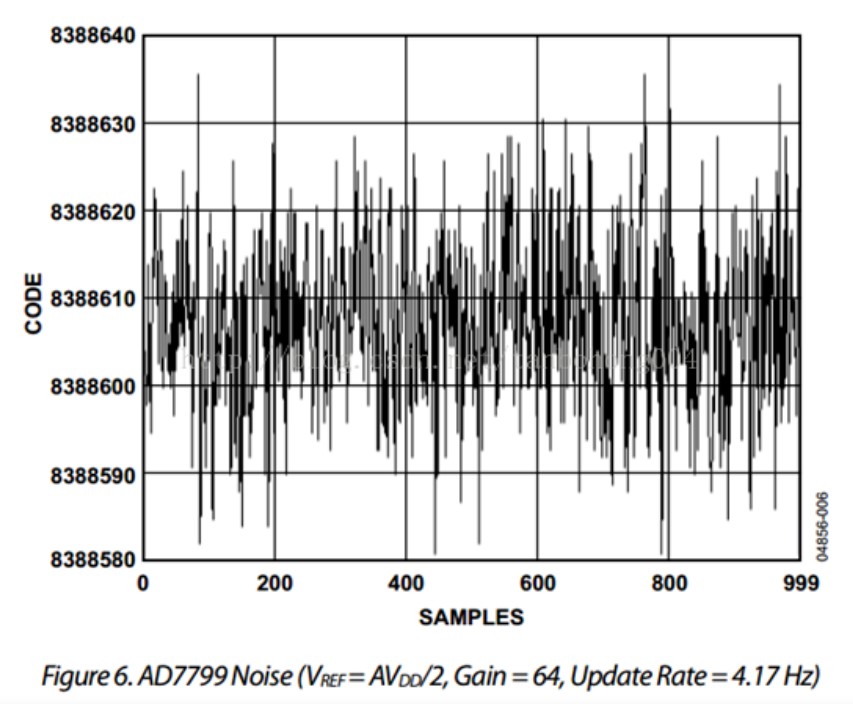
摆幅稳定在±4µV,效果还是很理想的,官方测试条件Gain=64,加入片内放大器后噪声干扰还是不小的(下图,Y轴
单位LBS),有将近60个LBS的波动,当然主抗匹配也有一定的原因。因此在使用前零度和满度校准是十分必要的。
6. 总结
作为一款低速高精度的ADC,AD7799是个不错的选择,相比于ADS1232虽然价格上是高了,但是他比
ADS1232多了一个差分通道,转换速率可以到达470Hz,在本次测试看来,就性能上看起来稍比ADS1232好一点,
但是相差无几,同样,超高的性价比和出色的性能让它在同级别的ADC中也有很强的竞争能力。
1. AD7799概述
AD7799是ADI公司早期推出一款高精度低速率的ADC,性能参数如下
•均方根(RMS)噪声:
27 nV(4.17 Hz、AD7799)
65 nV(16.7 Hz、AD7799)
40 nV(4.17 Hz、AD7798)
85 nV(16.7 Hz、AD7798)
•功耗:380 µA(典型值)
•省电模式:最大1 µA
•低噪声可编程增益仪表放大器
•更新速率:4.17 Hz至470 Hz;3个差分输入(相比ADS1232多一个通道)
•内部时钟振荡器
•50 Hz/60 Hz同时抑制
•基准电压检测
•低端电源开关
•可编程数字输出
•熔断电流控制
•电源电压:2.7 V至5.25 V
•高达23.5个有效位
AD7799性价比很高,非常适用于静态变量的测试,如电子秤、应变计、气体分析、仪器仪表、压力传感器、血液分析、工业过程控制等应用。本人对AD7799做了一次比较测试,分享下测试的结果
2. 硬件设计分析
从结构图可以看出来,AD7799是模拟区域与数字区域完全独立的ADC,即AVDD给模拟区域供电,DVDD给数字区域供电,在原理图设计方面按照官方指导文档,需要对两个区域做独立的布线与隔离处理,才能让信噪比最佳。另可靠的基准电压是高精度ADC命根,本次试验选择TI公司推出的REF5025作基准参考,REF5025可低于3µVpp/V 噪声、3ppm/°C 漂移,性能是十分出色的。
由于经常做高频类项目,十分讨厌杜邦线/飞线测试方式,在高精度的领域,24位ADC梯度值2的2416777216,如果接入基准电压是2.5v,理论分辨率可达到0.149μV,做过高频的工程师深知杜邦线的罪恶,根据上面的技术分析,哪怕线路被引入1μV的干扰,也可以让精度打上一定折扣。为了让ADS1232性能得以充分体现,特意做了一个测试载板,载板的设计也是很关键,分割模拟数字区域同时,连接地方大量使用钽电容做旁路电路,以把波纹抑制到最小,合理的布局与布线也很重要,敷铜区域也需要模数分离,以磁珠或者0-5R/电感隔开。
3. 时序图解说
由时序图看出来,AD7799读写是简单的3线串行读数方式,属于Microwire串行接口,STM32的SPI接口可以
完美的与之匹配,当然也可以采用软仿SPI替代STM32的硬件SPI,这样的程序更具移植性。SPI时序实现也相对简单,
AD7799的CS线仅仅只是做片选使用(上图所示),而不用过多管理,保持低电平即可。特别需要注意的是在空闲时
候,SCLK时钟信号需要保持高电平,在SCLK半个周期当DIN接收到0x58后转换的数据才传入到DOUT总线,这时候
才能读取数据。
4. 核心源码
寄存器列表(官方)
#define AD7799_CS_LOW AD_CS_0()
#define AD7799_CS_HIGH AD_CS_1()
#define ADC_RDY_DAT (AD_DO)
/*AD7799 Registers*/
#define AD7799_REG_COMM 0 /* Communications Register(WO, 8-bit) */
#define AD7799_REG_STAT 0 /* Status Register (RO, 8-bit) */
#define AD7799_REG_MODE 1 /* Mode Register (RW, 16-bit */
#define AD7799_REG_CONF 2 /* Configuration Register (RW, 16-bit)*/
#define AD7799_REG_DATA 3 /* Data Register (RO, 16-/24-bit) */
#define AD7799_REG_ID 4 /* ID Register (RO, 8-bit) */
#define AD7799_REG_IO 5 /* IO Register (RO, 8-bit) */
#define AD7799_REG_OFFSET 6 /* Offset Register (RW, 24-bit */
#define AD7799_REG_FULLSALE 7 /* Full-Scale Register (RW, 24-bit */
/* Communications Register Bit Designations (AD7799_REG_COMM) */
#define AD7799_COMM_WEN (1 << 7) /* Write Enable */
#define AD7799_COMM_WRITE (0 << 6) /* Write Operation */
#define AD7799_COMM_READ (1 << 6) /* Read Operation */
#define AD7799_COMM_ADDR(x) (((x) & 0x7) << 3) /* Register Address */
#define AD7799_COMM_CREAD (1 << 2) /* Continuous Read of Data Register */
/* Status Register Bit Designations (AD7799_REG_STAT) */
#define AD7799_STAT_RDY (1 << 7) /* Ready */
#define AD7799_STAT_ERR (1 << 6) /* Error (Overrange, Underrange) */
#define AD7799_STAT_CH3 (1 << 2) /* Channel 3 */
#define AD7799_STAT_CH2 (1 << 1) /* Channel 2 */
#define AD7799_STAT_CH1 (1 << 0) /* Channel 1 */
/* Mode Register Bit Designations (AD7799_REG_MODE) */
#define AD7799_MODE_SEL(x) (((x) & 0x7) << 13) /* Operation Mode Select */
#define AD7799_MODE_PSW(x) (1 << 12) /* Power Switch Control Bit */
#define AD7799_MODE_RATE(x) ((x) & 0xF) /* Filter Update Rate Select */
/* AD7799_MODE_SEL(x) options */
#define AD7799_MODE_CONT 0 /* Continuous Conversion Mode */
#define AD7799_MODE_SINGLE 1 /* Single Conversion Mode */
#define AD7799_MODE_IDLE 2 /* Idle Mode */
#define AD7799_MODE_PWRDN 3 /* Power-Down Mode */
#define AD7799_MODE_CAL_INT_ZERO 4 /* Internal Zero-Scale Calibration */
#define AD7799_MODE_CAL_INT_FULL 5 /* Internal Full-Scale Calibration */
#define AD7799_MODE_CAL_SYS_ZERO 6 /* System Zero-Scale Calibration */
#define AD7799_MODE_CAL_SYS_FULL 7 /* System Full-Scale Calibration */
/* Configuration Register Bit Designations (AD7799_REG_CONF) */
#define AD7799_CONF_BO_EN (1 << 13) /* Burnout Current Enable */
#define AD7799_CONF_UNIPOLAR (1 << 12) /* Unipolar/Bipolar Enable */
#define AD7799_CONF_GAIN(x) (((x) & 0x7) << 8) /* Gain Select */
#define AD7799_CONF_REFDET(x) (((x) & 0x1) << 5) /* Reference detect function */
#define AD7799_CONF_BUF (1 << 4) /* Buffered Mode Enable */
#define AD7799_CONF_CHAN(x) ((x) & 0x7) /* Channel select */
/* AD7799_CONF_GAIN(x) options */
#define AD7799_GAIN_1 0
#define AD7799_GAIN_2 1
#define AD7799_GAIN_4 2
#define AD7799_GAIN_8 3
#define AD7799_GAIN_16 4
#define AD7799_GAIN_32 5
#define AD7799_GAIN_64 6
#define AD7799_GAIN_128 7
/* AD7799_CONF_REFDET(x) options */
#define AD7799_REFDET_ENA 1
#define AD7799_REFDET_DIS 0
/* AD7799_CONF_CHAN(x) options */
#define AD7799_CH_AIN1P_AIN1M 0 /* AIN1(+) - AIN1(-) */
#define AD7799_CH_AIN2P_AIN2M 1 /* AIN2(+) - AIN2(-) */
#define AD7799_CH_AIN3P_AIN3M 2 /* AIN3(+) - AIN3(-) */
#define AD7799_CH_AIN1M_AIN1M 3 /* AIN1(-) - AIN1(-) */
#define AD7799_CH_AVDD_MONITOR 7 /* AVDD Monitor */
/* ID Register Bit Designations (AD7799_REG_ID) */
#define AD7799_ID 0x9
#define AD7799_ID_MASK 0xF
/* IO (Excitation Current Sources) Register Bit Designations (AD7799_REG_IO) */
#define AD7799_IOEN (1 << 6)
#define AD7799_IO1(x) (((x) & 0x1) << 4)
#define AD7799_IO2(x) (((x) & 0x1) << 5)
初始化程序
unsigned char AD7799_Init(void)
{
unsigned char status = 0x1;
u32 ID=AD7799_GetRegisterValue(AD7799_REG_ID, 1);
if( (ID& 0x0F) != AD7799_ID)
{
status = 0x0;
}
return(status);
}
读取寄存器值
unsigned long AD7799_GetRegisterValue(unsigned char regAddress, unsigned char size)
{
unsigned char data[5] = {0x00, 0x00, 0x00, 0x00, 0x00};
unsigned long receivedData = 0x00;
data[0] = AD7799_COMM_READ | AD7799_COMM_ADDR(regAddress);
AD7799_CS_LOW;
SPI_Write(data,1);
SPI_Read(data,size);
AD7799_CS_HIGH;
if(size == 1)
{
receivedData += (data[0] << 0);
}
if(size == 2)
{
receivedData += (data[0] << 8);
receivedData += (data[1] << 0);
}
if(size == 3)
{
receivedData += (data[0] << 16);
receivedData += (data[1] << 8);
receivedData += (data[2] << 0);
}
return receivedData;
}
写寄存器
void AD7799_SetRegisterValue(unsigned char regAddress,
unsigned long regValue,
unsigned char size)
{
unsigned char data[5] = {0x03, 0x00, 0x00, 0x00, 0x00};
data[0] = AD7799_COMM_WRITE | AD7799_COMM_ADDR(regAddress);
if(size == 1)
{
data[1] = (unsigned char)regValue;
}
if(size == 2)
{
data[2] = (unsigned char)((regValue & 0x0000FF) >> 0);
data[1] = (unsigned char)((regValue & 0x00FF00) >> 8);
}
if(size == 3)
{
data[3] = (unsigned char)((regValue & 0x0000FF) >> 0);
data[2] = (unsigned char)((regValue & 0x00FF00) >> 8);
data[1] = (unsigned char)((regValue & 0xFF0000) >> 16);
}
AD7799_CS_LOW;
SPI_Write(data,(1 + size));
AD7799_CS_HIGH;
}
复位
void AD7799_Reset(void)
{
unsigned char dataToSend[5] = {0x03, 0xff, 0xff, 0xff, 0xff};
AD7799_CS_LOW;
SPI_Write(dataToSend,4);
AD7799_CS_HIGH;
}
初始化:
void AD7799_INIT(void)
{
unsigned long command;
command = AD7799_GetRegisterValue(AD7799_REG_CONF,2);
command &= ~AD7799_CONF_GAIN(0xFF);
command |= AD7799_CONF_GAIN(1); / 不使用内部PGA
AD7799_SetRegisterValue(AD7799_REG_CONF,command,2);
AD7799_SetReference();
command = AD7799_GetRegisterValue(AD7799_REG_CONF,2);
command &= ~AD7799_CONF_CHAN(0xFF);
command |= AD7799_CONF_CHAN(2); // 第三通道 AIN3+ —— AIN3-
AD7799_SetRegisterValue(AD7799_REG_CONF,command,2);
command = AD7799_GetRegisterValue(AD7799_REG_MODE,2);
command &= ~AD7799_MODE_SEL(0xFF);
command |= AD7799_MODE_SEL(0);// 连续转换模式
AD7799_SetRegisterValue(AD7799_REG_MODE,command,2);
}
5. 测试结果
测试条件Vref=2.5v(REF5025调理过后输出)、Gain=1、Updata Reat=4.17Hz
测试源是AVDD电阻分压后的电压值,实际加入电压是:2.217452v(8位半表实测),通过误差曲线的分析,
摆幅稳定在±4µV,效果还是很理想的,官方测试条件Gain=64,加入片内放大器后噪声干扰还是不小的(下图,Y轴
单位LBS),有将近60个LBS的波动,当然主抗匹配也有一定的原因。因此在使用前零度和满度校准是十分必要的。
6. 总结
作为一款低速高精度的ADC,AD7799是个不错的选择,相比于ADS1232虽然价格上是高了,但是他比
ADS1232多了一个差分通道,转换速率可以到达470Hz,在本次测试看来,就性能上看起来稍比ADS1232好一点,
但是相差无几,同样,超高的性价比和出色的性能让它在同级别的ADC中也有很强的竞争能力。

 举报
举报




