资料下载地址-1011(百度网盘):点击下载
电烤箱所用的发热元件大致可分为三类:一类是选用一根远红外管和一根石英加热管的电烤箱,它是所有的电烤箱中档次较低的类型。不过,基本的电烤功能还是能实现的,只是烤的速度相对会慢一点。因此,它比较适合经济状况一般,但却需要买电烤箱的家庭以及单身一族。另一类是采用两根远红外管和一根石英加热管的电烤箱,这类烤箱的特点是加热速度比较快。不过,与前者相比,价格要稍微高出一些,一般贵上一两百元。还有一类则是在附件中备有一根紫外线加热管,可附带用于高温消毒。它能杀菌消毒,卫生程度较高,而且加热速度快,所以价格就比较贵了,它适合于经济条件好的消费者。
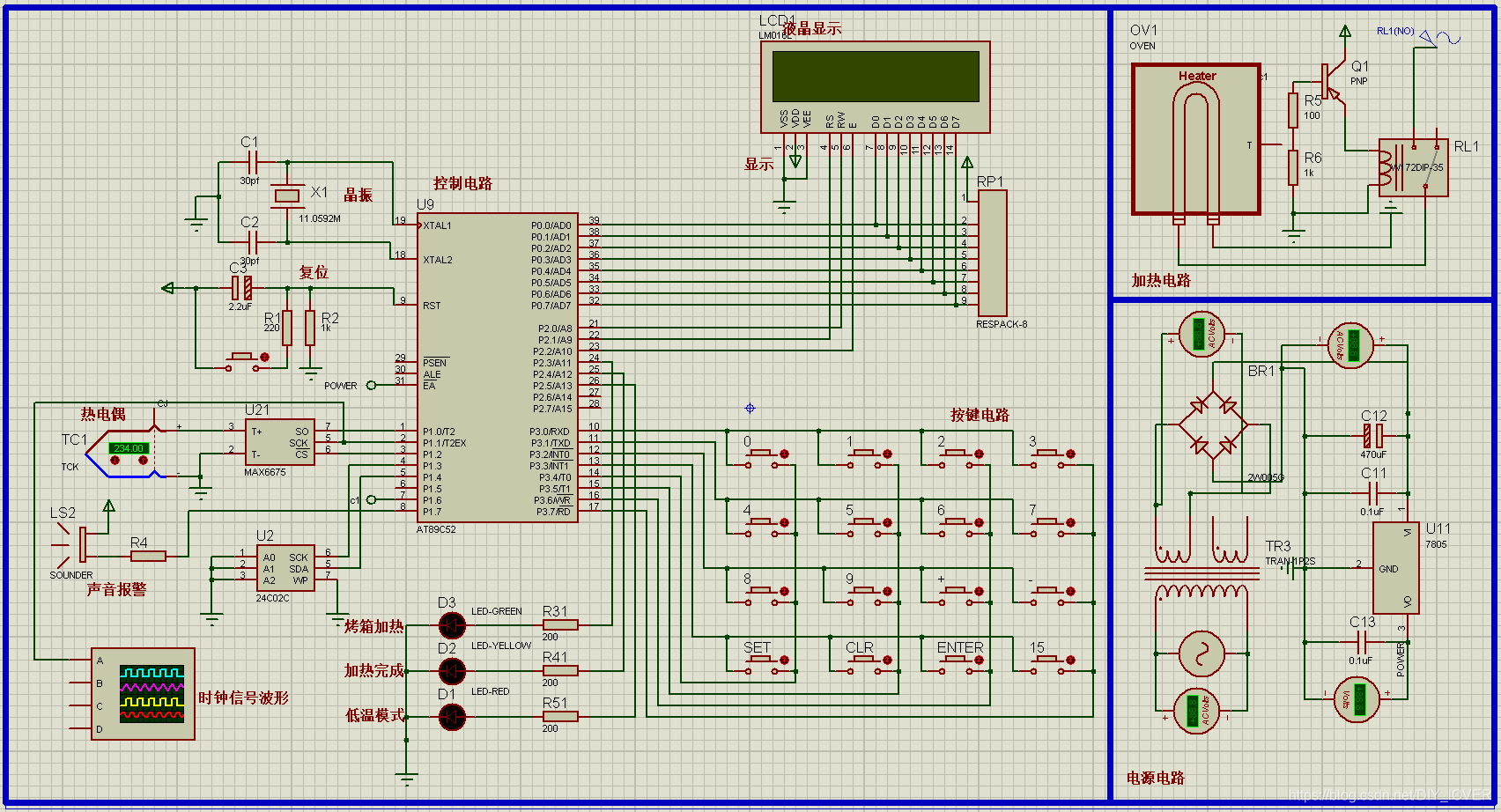
本文介绍了以C51单片机为核心的电烤箱温度控制系统。电烤箱的温度控制系统由硬件和软件两个部分构成。其中硬件部分包括:单片机电路、传感器电路、放大器转换电路、转换器电路以及显示电路。软件部分包括:主程序、运算控制程序、以及各功能实现模块的程序。
关键词:单片机,电烤箱,温度控制
#define uint unsigned int
***it MAX6675_CS = P1 ^ 2; /* MAX6675冷端温度补偿,将K型热电偶信号转为数字信号 */
***it MAX6675_SCK = P1 ^ 1;
***it MAX6675_SO = P1 ^ 0;
***it normal = P2 ^ 3; /* LED灯表示温度正常,过高,过低 */
***it upper = P2 ^ 4;
***it lower = P2 ^ 5;
***it direction = P2 ^ 6;
***it stop = P2 ^ 7;
***it SCL = P1 ^ 3; /* EEPROM,256byte */
***it SDA = P1 ^ 4;
***it beep = P1 ^ 7; /* 蜂鸣器 */
***it hot = P1^6;
bit ack, flag = 0, flag1 = 0;
uint tz;
int sth = 0, stl = 0, t_zhi = 0;
uchar data temp1[] = { '+', '1', '5', '0', '0', 0 }, temp2[] = { '-', '1', '0', '0', '0', 0 };
uchar data temp[7];
char code keytab[] = { 0xEE, 0xDE, 0xBE, 0x7E, 0xED, 0xDD, 0xBD, 0x7D, 0xEB, 0xDB, 0xBB, 0x7B, 0xE7, 0xD7, 0xB7, 0x77 };
unsigned char code str1[] = { "STH STL" }; /* system temperature high,low */
unsigned char code str2[] = { "PARAMTER STEUP" };
unsigned char code str3[] = { " " };
unsigned int testD2;
unsigned char data disdata[5];
void delay0( uchar x ) /* 延时函数 */
{
uchar i;
while ( x-- )
while ( x-- ) 
资料下载地址-1011(百度网盘):点击下载
电烤箱所用的发热元件大致可分为三类:一类是选用一根远红外管和一根石英加热管的电烤箱,它是所有的电烤箱中档次较低的类型。不过,基本的电烤功能还是能实现的,只是烤的速度相对会慢一点。因此,它比较适合经济状况一般,但却需要买电烤箱的家庭以及单身一族。另一类是采用两根远红外管和一根石英加热管的电烤箱,这类烤箱的特点是加热速度比较快。不过,与前者相比,价格要稍微高出一些,一般贵上一两百元。还有一类则是在附件中备有一根紫外线加热管,可附带用于高温消毒。它能杀菌消毒,卫生程度较高,而且加热速度快,所以价格就比较贵了,它适合于经济条件好的消费者。
本文介绍了以C51单片机为核心的电烤箱温度控制系统。电烤箱的温度控制系统由硬件和软件两个部分构成。其中硬件部分包括:单片机电路、传感器电路、放大器转换电路、转换器电路以及显示电路。软件部分包括:主程序、运算控制程序、以及各功能实现模块的程序。
关键词:单片机,电烤箱,温度控制
#define uint unsigned int
***it MAX6675_CS = P1 ^ 2; /* MAX6675冷端温度补偿,将K型热电偶信号转为数字信号 */
***it MAX6675_SCK = P1 ^ 1;
***it MAX6675_SO = P1 ^ 0;
***it normal = P2 ^ 3; /* LED灯表示温度正常,过高,过低 */
***it upper = P2 ^ 4;
***it lower = P2 ^ 5;
***it direction = P2 ^ 6;
***it stop = P2 ^ 7;
***it SCL = P1 ^ 3; /* EEPROM,256byte */
***it SDA = P1 ^ 4;
***it beep = P1 ^ 7; /* 蜂鸣器 */
***it hot = P1^6;
bit ack, flag = 0, flag1 = 0;
uint tz;
int sth = 0, stl = 0, t_zhi = 0;
uchar data temp1[] = { '+', '1', '5', '0', '0', 0 }, temp2[] = { '-', '1', '0', '0', '0', 0 };
uchar data temp[7];
char code keytab[] = { 0xEE, 0xDE, 0xBE, 0x7E, 0xED, 0xDD, 0xBD, 0x7D, 0xEB, 0xDB, 0xBB, 0x7B, 0xE7, 0xD7, 0xB7, 0x77 };
unsigned char code str1[] = { "STH STL" }; /* system temperature high,low */
unsigned char code str2[] = { "PARAMTER STEUP" };
unsigned char code str3[] = { " " };
unsigned int testD2;
unsigned char data disdata[5];
void delay0( uchar x ) /* 延时函数 */
{
uchar i;
while ( x-- )
while ( x-- )

 举报
举报




