

| 1 | MCU | 1 | STM32F303 72MHz ARM Cortex M4F |
| 2 | 电机驱动 | 1 | TI DRIV8834 |
| 3 | 电机 | 2 | 1:30 PoloHu,具有磁编码器 |
| 4 | 轮胎 | 2 | Pololu直径28mm |
| 5 | 巡线传感器 | 8 | 540nm光电光电传感器+白色补光LED |
| 6 | 红外传感器 | 3 | 表贴红外传感器+红外LED |
| 7 | 惯性传感器 | 1 | IMU LSM6DS0 陀螺仪+加速度计 |



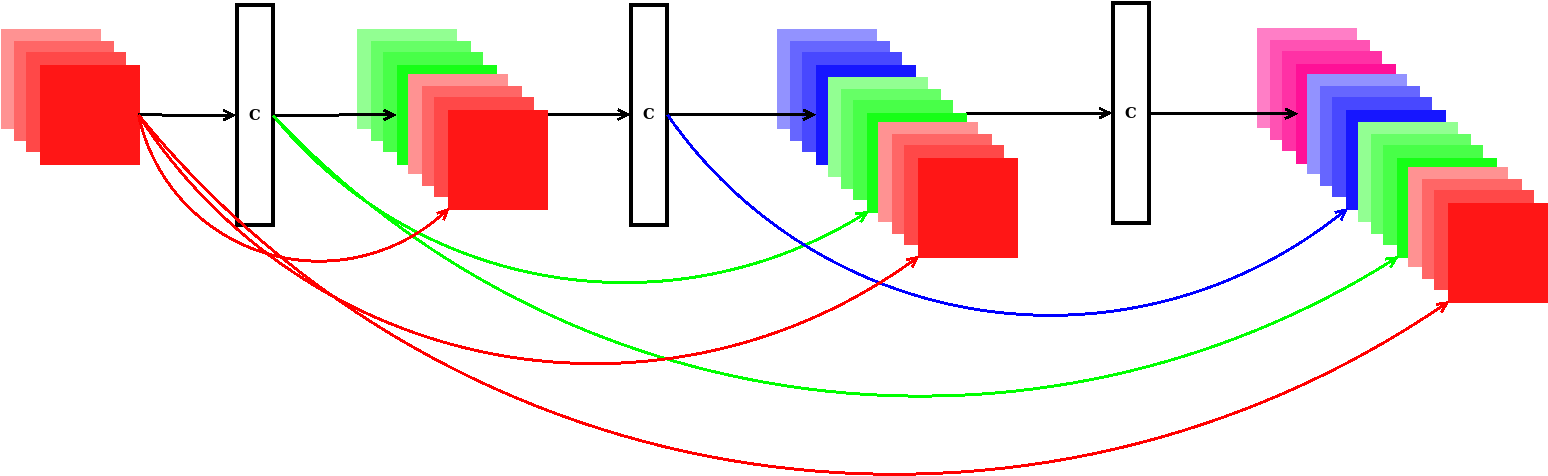
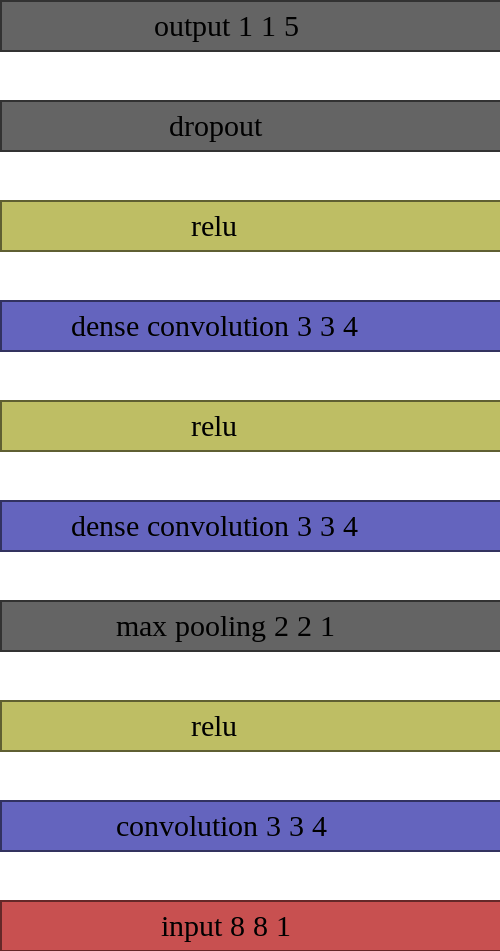
| 1 | 卷积3×3×4 | 8×8×1 |
| 2 | MAX POOLING 2×2 | 8×8×4 |
| 3 | 稠密卷积3×3×4 | 4×4×4 |
| 4 | 稠密卷积3×3×4 | 4×4×8 |
| 5 | 全连接层 输出5 | 4×4×12 |


 举报
举报
更多回帖


