
![]()
![]()
NRF24L01无线
通信模块使用示例和调试心得分享
回帖(1)

2021-12-17 10:18:28
nRF24L01是由NORDIC生产的工作在2.4GHz~2.5GHz的ISM 频段的单片无线收发器芯片。凭借其低功耗、传输速率高、误传率低等的优点,现已广泛应用在各种嵌入式系统中。本文就该模块总结一些学习过程中的经验和心得。
1. NRF24L01模块
该模块工作电压为3.3V,当该模块与单片机相连时,两者基于SPI通信协议进行数据交换。如果有两个以上的NRF无线模块且当代码中未设置SPI片选信号时,此时可一对多通信(即一个发多个收到该信息)。其外观如下:
 NRF24L01模块外观 下面是该模块的PCB图,其中CE、CSN、IRQ为控制引脚;MOSI、MISO、SCK为SPI通信引脚。上面的这些引脚均可直接接普通的IO口,而不必特意选择SPI外设对应的引脚。下面解释各个引脚的具体含义:
NRF24L01模块外观 下面是该模块的PCB图,其中CE、CSN、IRQ为控制引脚;MOSI、MISO、SCK为SPI通信引脚。上面的这些引脚均可直接接普通的IO口,而不必特意选择SPI外设对应的引脚。下面解释各个引脚的具体含义:
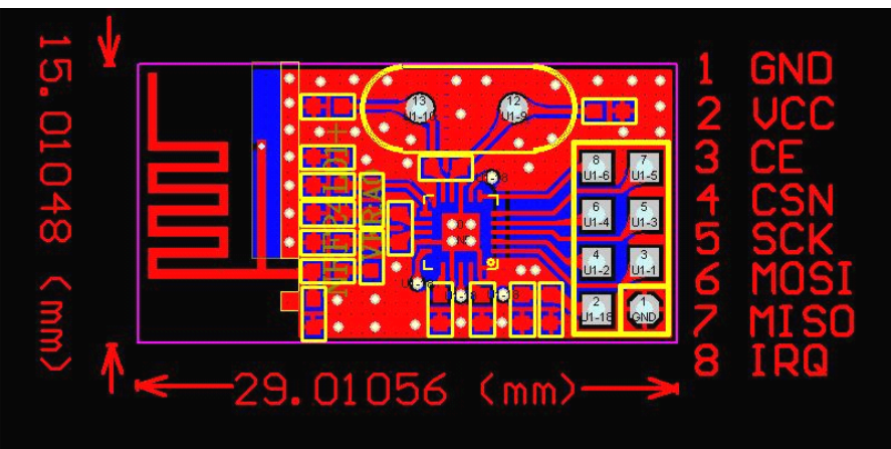 NRF24L01PCB封装 [tr]引脚引脚含义[/tr]
NRF24L01PCB封装 [tr]引脚引脚含义[/tr]
| VCC、GND | 电源引脚,注意务必接到3.3V的电源上 |
| CE | 使能引脚 |
| CSN | SPI片选引脚 |
| SCK | SPI时钟信号引脚 |
| MOS、MISOI | SPI数据引脚 |
| IRQ | 可屏蔽中断引脚 |
本文的示例程序应用在两个NRF24L01模块之间相互通信的场合,其通信拓扑关系如下图:
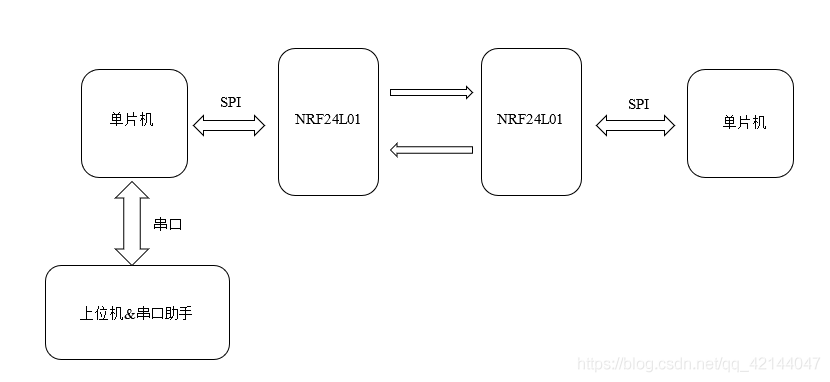 本次实验中的通信关系图 上图中,之所以为了添加上位机与单片机的通信,主要是为了控制和验证通信内容。 2. SPI通信协议
上面提到了SPI通信协议,了解该协议的主要特点将非常有助于我们的调试工作。下面就讲一讲SPI通信协议:
SPI是串行外设接口(Serial Peripheral Interface)的缩写,是一种高速的,全双工,同步的通信总线,并且在芯片的管脚上只占用四根线,节约了芯片的管脚,同时为PCB的布局上节省空间,提供方便,正是出于这种简单易用的特性,越来越多的芯片集成了这种通信协议。
SPI的通信原理很简单,它以主从方式工作,这种模式通常有一个主设备和一个或多个从设备,需要至少4根线,事实上3根也可以(单向传输时)。也是所有基于SPI的设备共有的,它们是MISO(主设备数据输入)、MOSI(主设备数据输出)、SCLK(时钟)、CS(片选)。
(1)MISO– Master Input Slave Output,主设备数据输入,从设备数据输出;
(2)MOSI– Master Output Slave Input,主设备数据输出,从设备数据输入;
(3)SCLK – Serial Clock,时钟信号,由主设备产生;
(4)CS – Chip Select,从设备使能信号,由主设备控制。
SPI通信的内部简明图如下:
本次实验中的通信关系图 上图中,之所以为了添加上位机与单片机的通信,主要是为了控制和验证通信内容。 2. SPI通信协议
上面提到了SPI通信协议,了解该协议的主要特点将非常有助于我们的调试工作。下面就讲一讲SPI通信协议:
SPI是串行外设接口(Serial Peripheral Interface)的缩写,是一种高速的,全双工,同步的通信总线,并且在芯片的管脚上只占用四根线,节约了芯片的管脚,同时为PCB的布局上节省空间,提供方便,正是出于这种简单易用的特性,越来越多的芯片集成了这种通信协议。
SPI的通信原理很简单,它以主从方式工作,这种模式通常有一个主设备和一个或多个从设备,需要至少4根线,事实上3根也可以(单向传输时)。也是所有基于SPI的设备共有的,它们是MISO(主设备数据输入)、MOSI(主设备数据输出)、SCLK(时钟)、CS(片选)。
(1)MISO– Master Input Slave Output,主设备数据输入,从设备数据输出;
(2)MOSI– Master Output Slave Input,主设备数据输出,从设备数据输入;
(3)SCLK – Serial Clock,时钟信号,由主设备产生;
(4)CS – Chip Select,从设备使能信号,由主设备控制。
SPI通信的内部简明图如下:
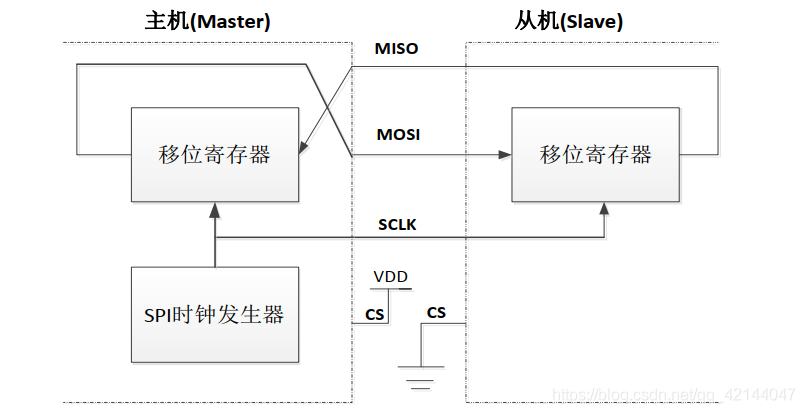 从图中可以看出, 主机和从机都有一个串行移位寄存器,主机通过向它的 SPI 串行寄存器写入一个字节来发起一次传输。寄存器通过 MOSI 信号线将字节传送给从机,从机也将自己的移位寄存器中的内容通过 MISO 信号线返回给主机。这样,两个移位寄存器中的内容就被交换。外设的写操作和读操作是同步完成的。如果只进行写操作,主机只需忽略接收到的字节;反之,若主机要读取从机的一个字节,就必须发送一个空字节来引发从机的传输。
SPI 主要特点有: 可以同时发出和接收串行数据; 可以当作主机或从机工作; 提供频率可编程时钟; 发送结束中断标志; 写冲突保护; 总线竞争保护等。
SPI 总线四种工作方式 SPI 模块为了和外设进行数据交换,根据外设工作要求,其输出串行同步时钟极性和相位可以进行配置,时钟极性(CPOL)对传输协议没有重大的影响。如果CPOL=0,串行同步时钟的空闲状态为低电平;如果 CPOL=1,串行同步时钟的空闲状态为高电平。时钟相位( CPHA)能够配置用于选择两种不同的传输协议之一进行数据传输。如果CPHA=0,在串行同步时钟的第一个跳变沿(上升或下降)数据被采样;如果 CPHA=1,在串行同步时钟的第二个跳变沿(上升或下降)数据被采样。 SPI 主模块和与之通信的外设备时钟相位和极性应该一致。
SPI时序图如下:
从图中可以看出, 主机和从机都有一个串行移位寄存器,主机通过向它的 SPI 串行寄存器写入一个字节来发起一次传输。寄存器通过 MOSI 信号线将字节传送给从机,从机也将自己的移位寄存器中的内容通过 MISO 信号线返回给主机。这样,两个移位寄存器中的内容就被交换。外设的写操作和读操作是同步完成的。如果只进行写操作,主机只需忽略接收到的字节;反之,若主机要读取从机的一个字节,就必须发送一个空字节来引发从机的传输。
SPI 主要特点有: 可以同时发出和接收串行数据; 可以当作主机或从机工作; 提供频率可编程时钟; 发送结束中断标志; 写冲突保护; 总线竞争保护等。
SPI 总线四种工作方式 SPI 模块为了和外设进行数据交换,根据外设工作要求,其输出串行同步时钟极性和相位可以进行配置,时钟极性(CPOL)对传输协议没有重大的影响。如果CPOL=0,串行同步时钟的空闲状态为低电平;如果 CPOL=1,串行同步时钟的空闲状态为高电平。时钟相位( CPHA)能够配置用于选择两种不同的传输协议之一进行数据传输。如果CPHA=0,在串行同步时钟的第一个跳变沿(上升或下降)数据被采样;如果 CPHA=1,在串行同步时钟的第二个跳变沿(上升或下降)数据被采样。 SPI 主模块和与之通信的外设备时钟相位和极性应该一致。
SPI时序图如下:
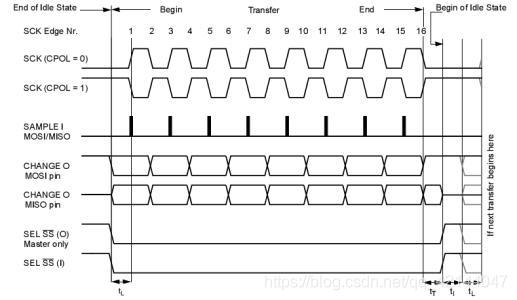 SPI通信时序图 3. 软件设计
本次实验在stm32f10xxx单片机上学习NRF无线模块的通信特点。代码中主要包含:NRF24L01模块的驱动程序(如初始化、发送/接收数据等函数的编写)、串口通信等。软件流程如下:
(1)初始化NRF无线模块和其他必要的外设;
(2)进入默认发送数据状态;
(3)监控串口中断,确认是否要修改通信状态——切换发送/接收信息状态;
由于代码量较大,这里只展示主函数和串口中断服务函数如下:
SPI通信时序图 3. 软件设计
本次实验在stm32f10xxx单片机上学习NRF无线模块的通信特点。代码中主要包含:NRF24L01模块的驱动程序(如初始化、发送/接收数据等函数的编写)、串口通信等。软件流程如下:
(1)初始化NRF无线模块和其他必要的外设;
(2)进入默认发送数据状态;
(3)监控串口中断,确认是否要修改通信状态——切换发送/接收信息状态;
由于代码量较大,这里只展示主函数和串口中断服务函数如下:
#include "stm32f10x.h"
#include "delay.h"
#include "24l01.h"
#include "timer.h"
#include "spi.h"
#include
#include "usart.h"
u8 mode;
int main()
{
u8 i;
u8 hell[] = "Hello! NRF24L01",buff;
mode=1;
delay_init();
uart_init(115200); //设置串口波特率
NVIC_PriorityGroupConfig(NVIC_PriorityGroup_2); //设置NVIC中断分组2:2位抢占优先级,2位响应优先级
NRF24L01_Init(); //初始化NRF24L01模块
delay_ms(50);
while(NRF24L01_Check()) //如果通信模块有问题会通过串口向上位机发送警告信息
{
printf("ERROR!n"); //向上位机报错
delay_ms(500);
}
while(1)
{
if(mode)
{
NRF24L01_TX_Mode();
for(i=0;hell!='�';i++)
{
while(NRF24L01_TxPacket(&hell) != TX_OK); //发送一个字节
}
printf("%s",hell); //发送完后,再向上位机汇报所发送的内容
}
else
{
NRF24L01_RX_Mode();
i = 0;
while(NRF24L01_RxPacket(&buff)); //向上位机发送接收到的数据
printf("%c",buff);
}
}
}
void USART1_IRQHandler(void) //串口1中断服务程序,通过串口修改NRF24L01模块的工作状态
{
if(USART_GetITStatus(USART1, USART_IT_RXNE) != RESET) //接收中断(接收到的数据必须是0x0d 0x0a结尾)
{
mode =USART_ReceiveData(USART1)-'0'; //读取接收到的数据
}
}
nRF24L01是由NORDIC生产的工作在2.4GHz~2.5GHz的ISM 频段的单片无线收发器芯片。凭借其低功耗、传输速率高、误传率低等的优点,现已广泛应用在各种嵌入式系统中。本文就该模块总结一些学习过程中的经验和心得。
1. NRF24L01模块
该模块工作电压为3.3V,当该模块与单片机相连时,两者基于SPI通信协议进行数据交换。如果有两个以上的NRF无线模块且当代码中未设置SPI片选信号时,此时可一对多通信(即一个发多个收到该信息)。其外观如下:
NRF24L01模块外观 下面是该模块的PCB图,其中CE、CSN、IRQ为控制引脚;MOSI、MISO、SCK为SPI通信引脚。上面的这些引脚均可直接接普通的IO口,而不必特意选择SPI外设对应的引脚。下面解释各个引脚的具体含义:
NRF24L01PCB封装 [tr]引脚引脚含义[/tr]
| VCC、GND | 电源引脚,注意务必接到3.3V的电源上 |
| CE | 使能引脚 |
| CSN | SPI片选引脚 |
| SCK | SPI时钟信号引脚 |
| MOS、MISOI | SPI数据引脚 |
| IRQ | 可屏蔽中断引脚 |
本文的示例程序应用在两个NRF24L01模块之间相互通信的场合,其通信拓扑关系如下图:
本次实验中的通信关系图 上图中,之所以为了添加上位机与单片机的通信,主要是为了控制和验证通信内容。 2. SPI通信协议
上面提到了SPI通信协议,了解该协议的主要特点将非常有助于我们的调试工作。下面就讲一讲SPI通信协议:
SPI是串行外设接口(Serial Peripheral Interface)的缩写,是一种高速的,全双工,同步的通信总线,并且在芯片的管脚上只占用四根线,节约了芯片的管脚,同时为PCB的布局上节省空间,提供方便,正是出于这种简单易用的特性,越来越多的芯片集成了这种通信协议。
SPI的通信原理很简单,它以主从方式工作,这种模式通常有一个主设备和一个或多个从设备,需要至少4根线,事实上3根也可以(单向传输时)。也是所有基于SPI的设备共有的,它们是MISO(主设备数据输入)、MOSI(主设备数据输出)、SCLK(时钟)、CS(片选)。
(1)MISO– Master Input Slave Output,主设备数据输入,从设备数据输出;
(2)MOSI– Master Output Slave Input,主设备数据输出,从设备数据输入;
(3)SCLK – Serial Clock,时钟信号,由主设备产生;
(4)CS – Chip Select,从设备使能信号,由主设备控制。
SPI通信的内部简明图如下:
从图中可以看出, 主机和从机都有一个串行移位寄存器,主机通过向它的 SPI 串行寄存器写入一个字节来发起一次传输。寄存器通过 MOSI 信号线将字节传送给从机,从机也将自己的移位寄存器中的内容通过 MISO 信号线返回给主机。这样,两个移位寄存器中的内容就被交换。外设的写操作和读操作是同步完成的。如果只进行写操作,主机只需忽略接收到的字节;反之,若主机要读取从机的一个字节,就必须发送一个空字节来引发从机的传输。
SPI 主要特点有: 可以同时发出和接收串行数据; 可以当作主机或从机工作; 提供频率可编程时钟; 发送结束中断标志; 写冲突保护; 总线竞争保护等。
SPI 总线四种工作方式 SPI 模块为了和外设进行数据交换,根据外设工作要求,其输出串行同步时钟极性和相位可以进行配置,时钟极性(CPOL)对传输协议没有重大的影响。如果CPOL=0,串行同步时钟的空闲状态为低电平;如果 CPOL=1,串行同步时钟的空闲状态为高电平。时钟相位( CPHA)能够配置用于选择两种不同的传输协议之一进行数据传输。如果CPHA=0,在串行同步时钟的第一个跳变沿(上升或下降)数据被采样;如果 CPHA=1,在串行同步时钟的第二个跳变沿(上升或下降)数据被采样。 SPI 主模块和与之通信的外设备时钟相位和极性应该一致。
SPI时序图如下:
SPI通信时序图 3. 软件设计
本次实验在stm32f10xxx单片机上学习NRF无线模块的通信特点。代码中主要包含:NRF24L01模块的驱动程序(如初始化、发送/接收数据等函数的编写)、串口通信等。软件流程如下:
(1)初始化NRF无线模块和其他必要的外设;
(2)进入默认发送数据状态;
(3)监控串口中断,确认是否要修改通信状态——切换发送/接收信息状态;
由于代码量较大,这里只展示主函数和串口中断服务函数如下:
#include "stm32f10x.h"
#include "delay.h"
#include "24l01.h"
#include "timer.h"
#include "spi.h"
#include
#include "usart.h"
u8 mode;
int main()
{
u8 i;
u8 hell[] = "Hello! NRF24L01",buff;
mode=1;
delay_init();
uart_init(115200); //设置串口波特率
NVIC_PriorityGroupConfig(NVIC_PriorityGroup_2); //设置NVIC中断分组2:2位抢占优先级,2位响应优先级
NRF24L01_Init(); //初始化NRF24L01模块
delay_ms(50);
while(NRF24L01_Check()) //如果通信模块有问题会通过串口向上位机发送警告信息
{
printf("ERROR!n"); //向上位机报错
delay_ms(500);
}
while(1)
{
if(mode)
{
NRF24L01_TX_Mode();
for(i=0;hell!='�';i++)
{
while(NRF24L01_TxPacket(&hell) != TX_OK); //发送一个字节
}
printf("%s",hell); //发送完后,再向上位机汇报所发送的内容
}
else
{
NRF24L01_RX_Mode();
i = 0;
while(NRF24L01_RxPacket(&buff)); //向上位机发送接收到的数据
printf("%c",buff);
}
}
}
void USART1_IRQHandler(void) //串口1中断服务程序,通过串口修改NRF24L01模块的工作状态
{
if(USART_GetITStatus(USART1, USART_IT_RXNE) != RESET) //接收中断(接收到的数据必须是0x0d 0x0a结尾)
{
mode =USART_ReceiveData(USART1)-'0'; //读取接收到的数据
}
}

 举报
举报
更多回帖



