STM32
登录
直播中
吴湛
10年用户
1016经验值
擅长:可编程逻辑
私信
关注
[问答]
如何去实现工业控制中常用的Modbus-RTU功能呢
开启该帖子的消息推送
RTU
定时器
为什么要采用
ti
M2来作为FreeModbus的定时器呢?
如何去实现工业控制中常用的Modbus-RTU功能呢?
回帖
(1)
康伟
2021-12-13 09:25:28
1.串口参数设置
我们选择UART2来做RS485接口,UART1作为备用,用来做调试中的串口打印用。串口的参数配置比较简单,不再赘述。注意要启用串口中断,FreeModbus采用中断的方式接受和发送串口数据。
2.定时器参数设置
采用TIM2来作为FreeModbus的定时器,这里主要实现工业控制中常用的Modbus-RTU功能,RTU协议中是靠时间间隔来判断一个数据帧是否结束的,所以需要用到定时器。
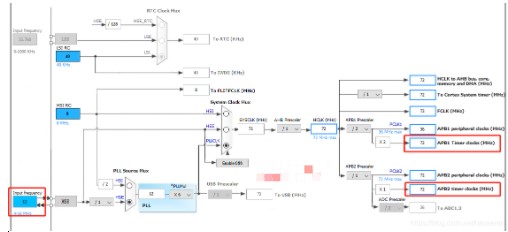
先上一张时钟配置图,如图1.
图1
晶振是12M的,APB1和APB2的定时器频率都是72M。
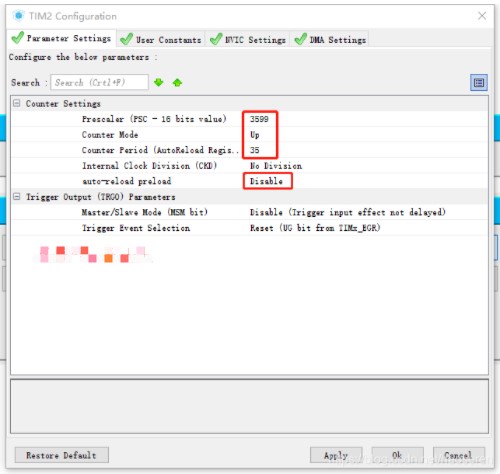
图2
图2是TIM2的参数配置界面,时钟分频是3599+1=3600,即:72÷3600=0.02MHz,一个时钟周期为:1÷0.02M=50us,之所以这样设置,是基于Freemodbus协议的需要。熟悉Freemodbus协议的朋友是知道的,在通信速率≥19200pbs时,帧间隔识别时间为固定的35×50us=1750us,在通信速率<19200pbs时,按照实际的11个bit时间计算。在这里暂且把Counter Period设为35,其实在程序代码中是根据实际通信速率来赋值的,这个在后面的文章中会详细介绍。这个地方也是本系列文章与网上大多数文章的不同支出,其他文章多数把这个参数设为固定值,每次更改通信速率都要手动改这个参数,感觉不是很方便。
3.中断说明
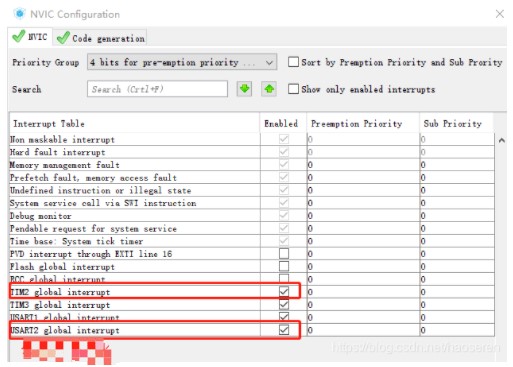
图3
如图3所示,中断部分的配置至少要使能TIM2和USART2的中断。在程序中,实际用到的是TIM2的定时溢出中断,UART2的接收完成中断和发送非空中断。
把这些设置完后,就可以去生成代码了,这一步比较简单,不再赘述。
1.串口参数设置
我们选择UART2来做RS485接口,UART1作为备用,用来做调试中的串口打印用。串口的参数配置比较简单,不再赘述。注意要启用串口中断,FreeModbus采用中断的方式接受和发送串口数据。
2.定时器参数设置
采用TIM2来作为FreeModbus的定时器,这里主要实现工业控制中常用的Modbus-RTU功能,RTU协议中是靠时间间隔来判断一个数据帧是否结束的,所以需要用到定时器。
先上一张时钟配置图,如图1.
图1
晶振是12M的,APB1和APB2的定时器频率都是72M。
图2
图2是TIM2的参数配置界面,时钟分频是3599+1=3600,即:72÷3600=0.02MHz,一个时钟周期为:1÷0.02M=50us,之所以这样设置,是基于Freemodbus协议的需要。熟悉Freemodbus协议的朋友是知道的,在通信速率≥19200pbs时,帧间隔识别时间为固定的35×50us=1750us,在通信速率<19200pbs时,按照实际的11个bit时间计算。在这里暂且把Counter Period设为35,其实在程序代码中是根据实际通信速率来赋值的,这个在后面的文章中会详细介绍。这个地方也是本系列文章与网上大多数文章的不同支出,其他文章多数把这个参数设为固定值,每次更改通信速率都要手动改这个参数,感觉不是很方便。
3.中断说明
图3
如图3所示,中断部分的配置至少要使能TIM2和USART2的中断。在程序中,实际用到的是TIM2的定时溢出中断,UART2的接收完成中断和发送非空中断。
把这些设置完后,就可以去生成代码了,这一步比较简单,不再赘述。
举报
更多回帖
rotate(-90deg);
回复
相关问答
RTU
定时器
MODBUS-RTU
工控协议是什么?有哪些
功能
?
2021-07-02
2370
ModBus-RTU
通信协议如何
控制
伺服电机?
2021-09-29
4296
如何
去
使用西门子的
modbus
Rtu
/Tcp通讯
功能
块
呢
2021-09-08
2030
大一新生求救,如何根据波特率计算
modbus-rtu
的传输时间
2014-08-16
18023
怎样
去
使用HAL库中断接收函数
呢
2021-11-16
1290
求问服从
Modbus-RTU
协议的软件数据,能用Labview提取出来么?
2014-01-19
4106
如何
去
制作出完美的西门子的
modbus
Rtu
/Tcp指令
功能
块?
2021-07-02
2577
modbus
TCP和
modbus
RTU
有什么区别?
2023-10-09
830
如何使测量数据在labview里显示
2014-10-31
4601
带
modbus-rtu
的uart crc升级不成功
2019-09-06
2273
发帖
登录/注册
20万+
工程师都在用,
免费
PCB检查工具
无需安装、支持浏览器和手机在线查看、实时共享
查看
点击登录
登录更多精彩功能!
首页
论坛版块
小组
免费开发板试用
ebook
直播
搜索
登录
×
20
完善资料,
赚取积分


 举报
举报



