STM32
登录
直播中
英雄孤寂
11年用户
1190经验值
私信
关注
[问答]
UART/USART异步通信特点是什么?
开启该帖子的消息推送
CMOS电平
处理器与外部设备
通信
的方式有哪几种?
UART/USART异步通信特点是什么?
什么是TTL电平、CMOS电平、RS232电平?它们有什么区别呢?
回帖
(1)
向婧宇
2021-12-6 10:18:51
处理器与外部设备通信的两种方式:
并行通信
传输原理:数据的各个位同时传输
优点:速度快
缺点:占用引脚资源多
串行通信
传输原理:数据按位顺序传输
优点:占用引脚资源少
缺点:速度相对较慢
串行通信:
按照数据传送方向分为
单工
半双工
全双工
串行通信的通信方式:
同步通信
带时钟同步信号传输
SPI,IIC通信接口
异步通信
不带时钟同步信号
UART(使用异步收发器),单总线
常见的串行通信接口:
[tr]通信标准引脚说明通信方式通信方向[/tr]
USART(通用异步收发器)
TXD:发送端 、 RXD:接收端、GND:公共地
异步通信
全双工
单总线(1-wire)
DQ:发送/接收端
异步通信
半双工
SPI
SCK:同步时钟、MISO:主机输入,从机输出、MOSI:主机输出、从机输入
同步通信
全双工
I2C
SCL:同步时钟、SDA:数据输入/输出端
同步通信
半双工
串口应该就是串行通信接口
STM32的串口通信接口:
UART:同步异步收发器
USART:通用同步异步收发器
不过207的手册只找到了USART和I2C接口
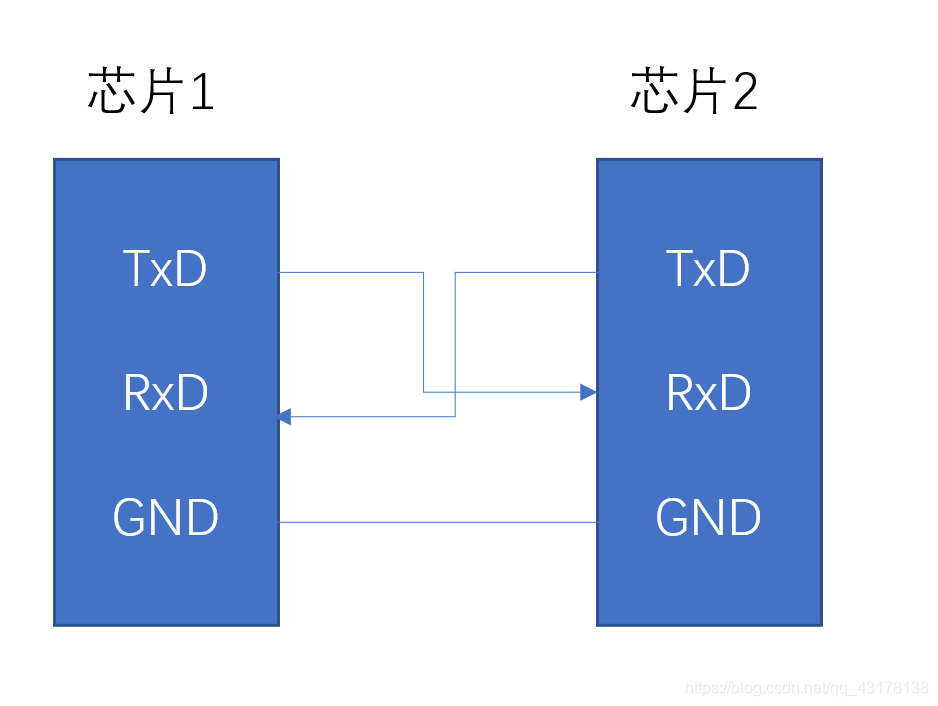
UART/USART异步通信方式引脚连接方式:
RXD :数据输入引脚。数据接受。
TXD :数据发送引脚。数据发送。
假如芯片1、2的串口都是TTL电平的,GND要先共地,发送连接到接收。
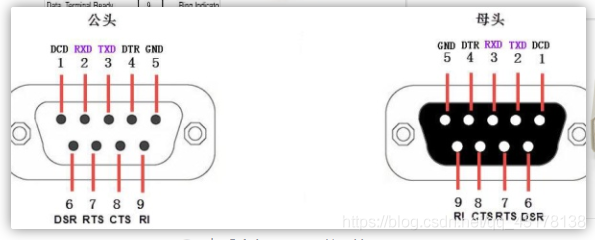
电脑上的串口叫DB9,就是下图这样的:
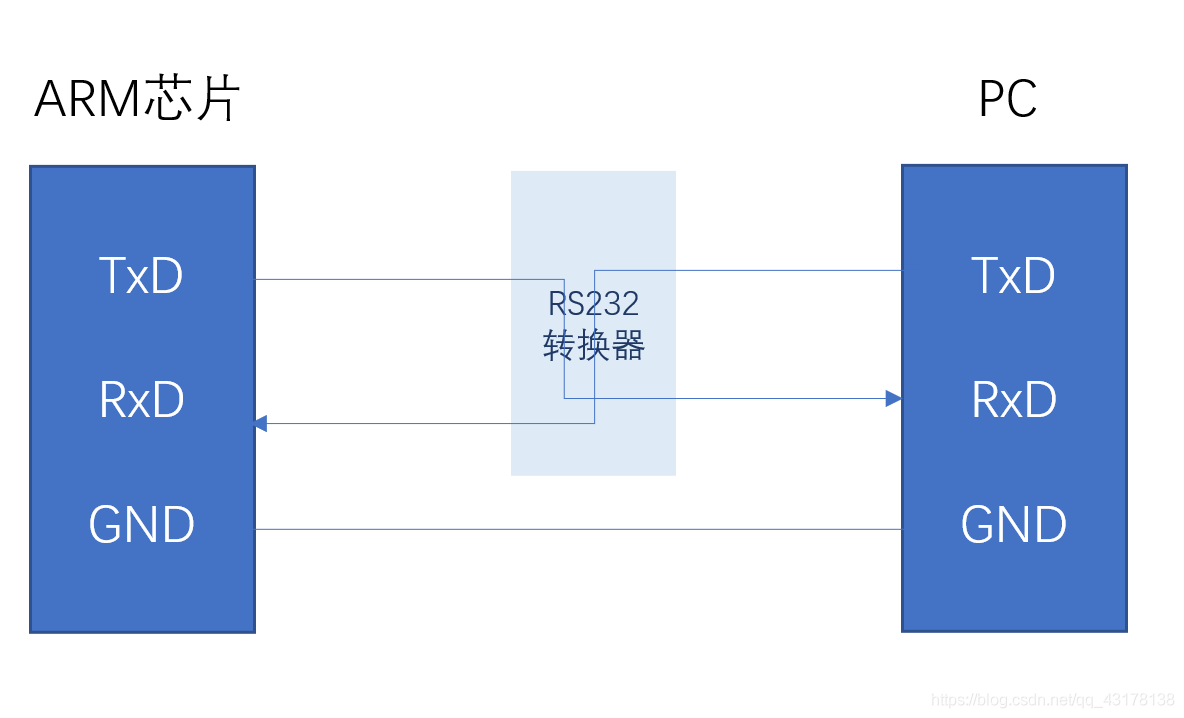
假如将芯片和PC连接,DB9实际上是进行了一个电平转换,经过电平转换转换成DB9这种9针的接口,STM32的芯片也需要RS232转换器,转成232电平,这样才能连在一起。而不能直接将芯片的TTL直接连到电脑的DB9收发引脚,电平是不兼容的。
UART/USART异步通信特点:
全双工异步通信
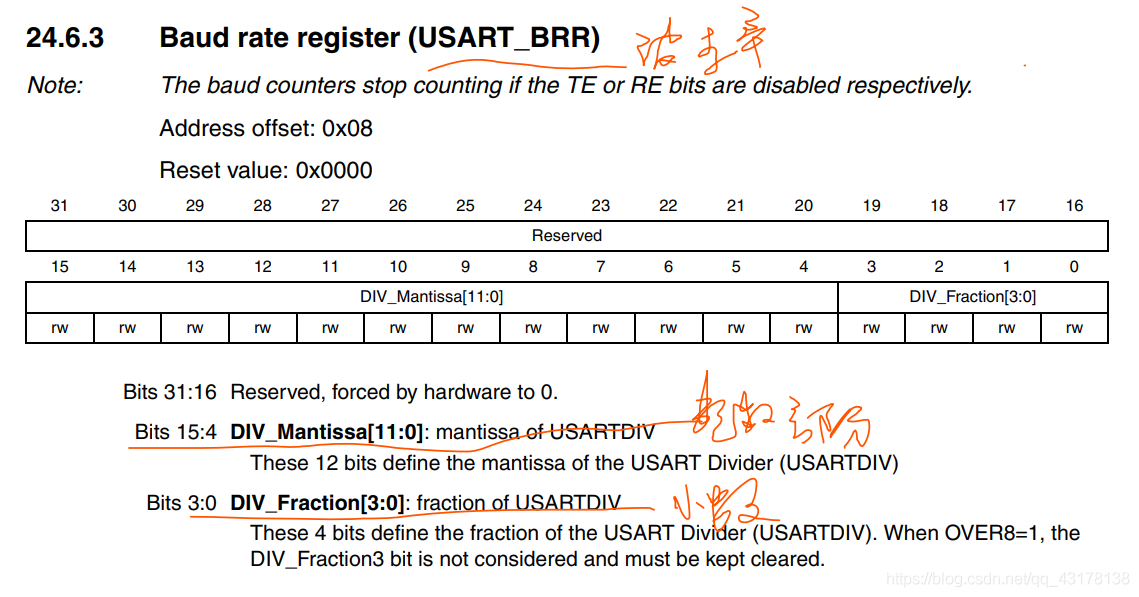
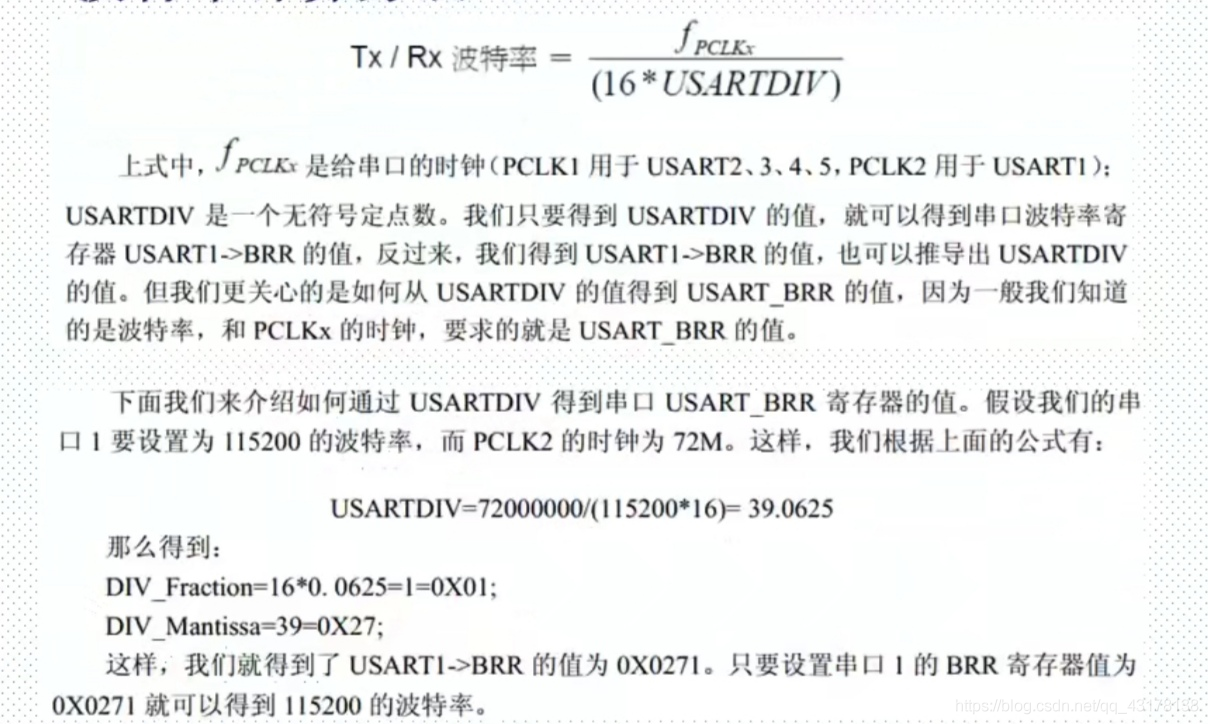
分数波特率发生器系统、提供精确的波特率
可编程的数据字长度(8位或者9位)
可配置的停止位(支持1或者2位停止位)
可配置的使用DMA多缓冲器通信
单独的发送器和接收器使能位
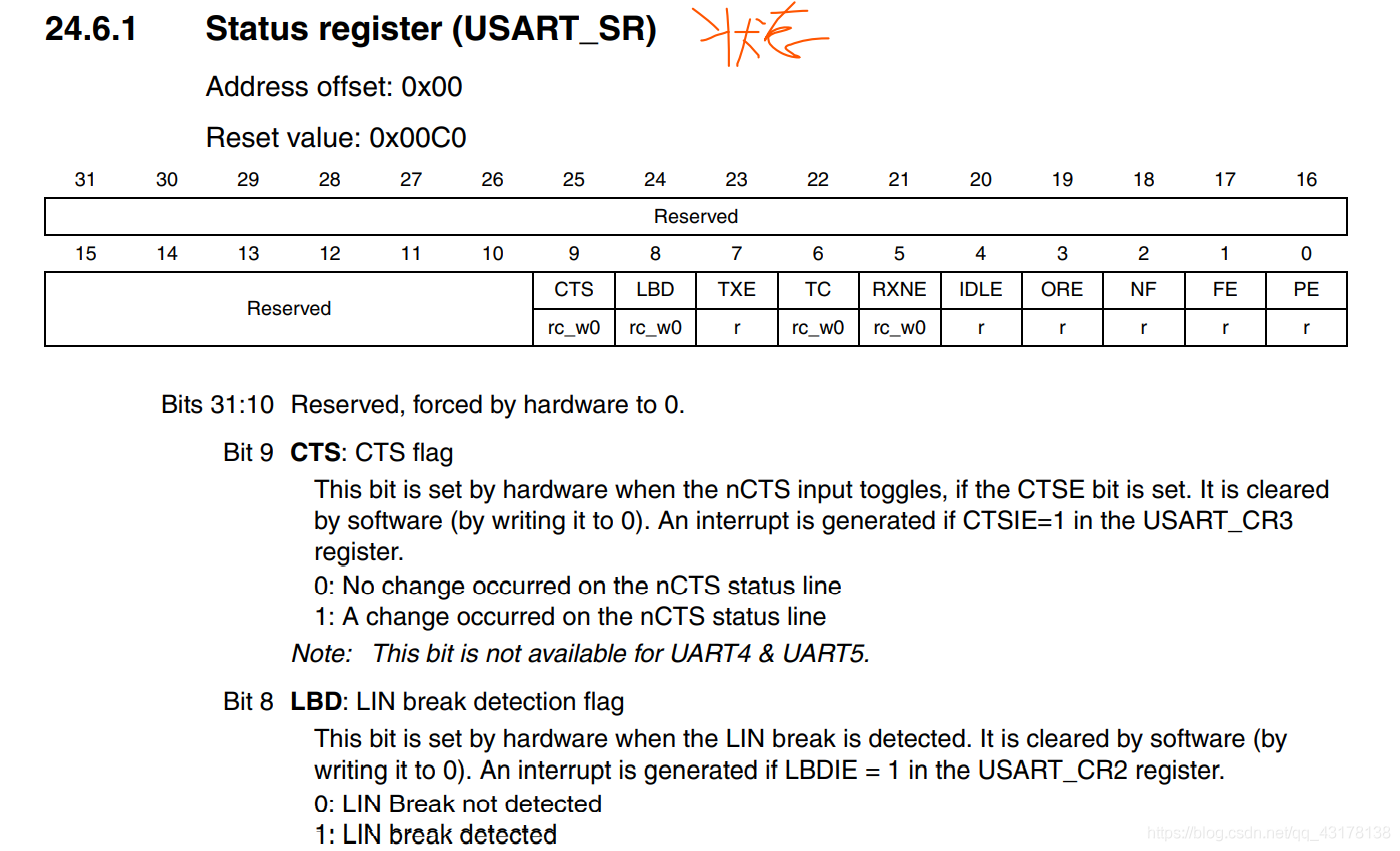
检测标志:接收缓冲器、发送缓冲器空、传输结束标志
多个带标志的中断源。触发中断
其他:校验控制,四个错误检测标志
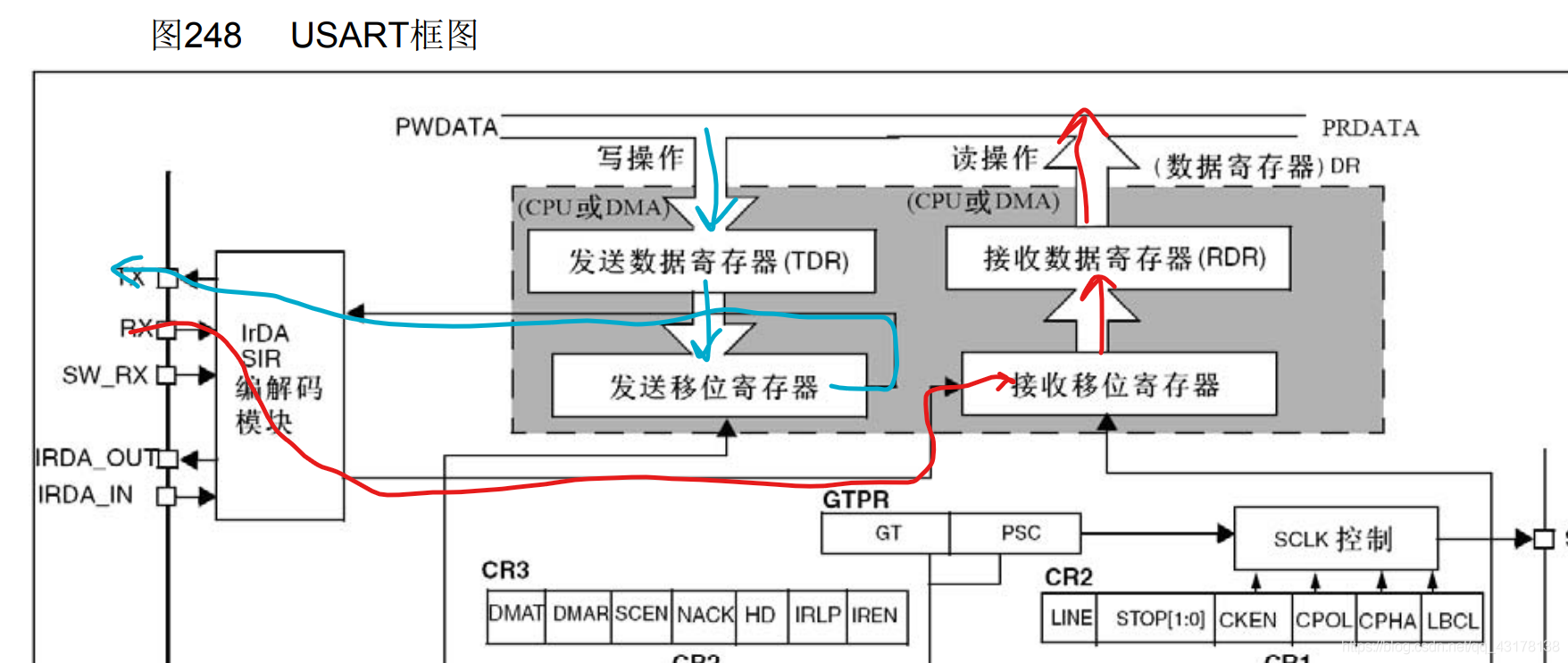
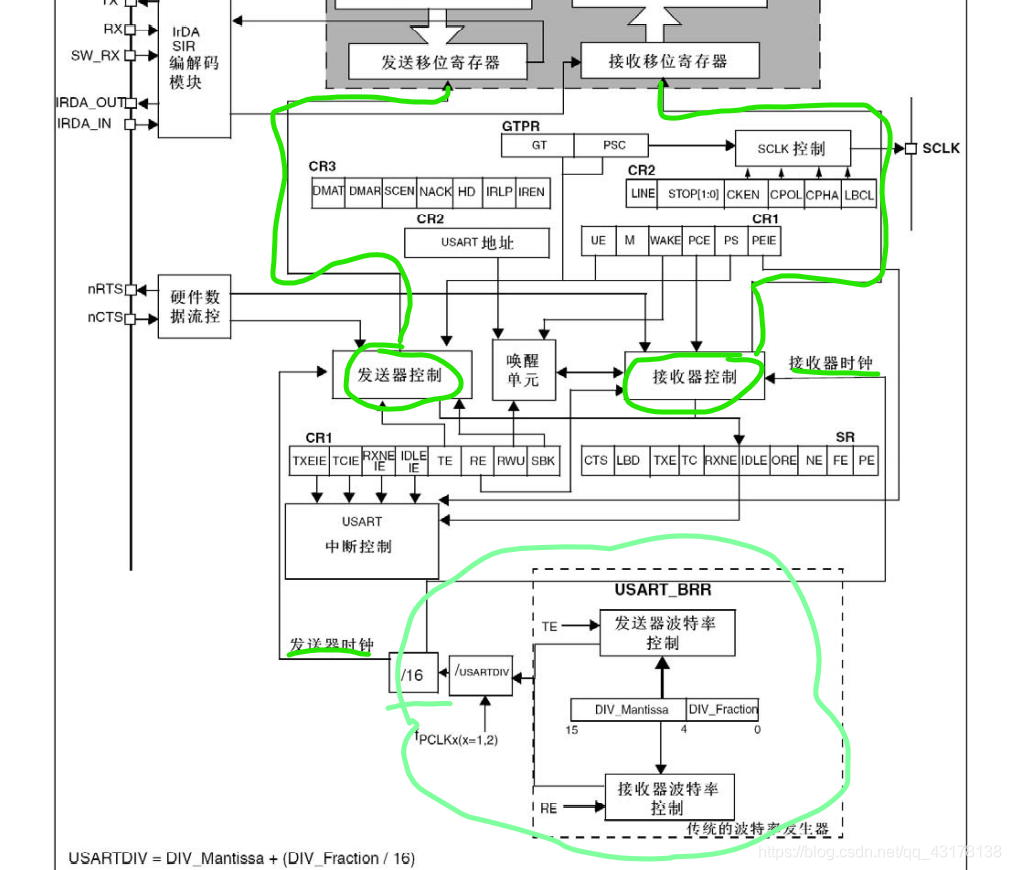
串口通信的过程:
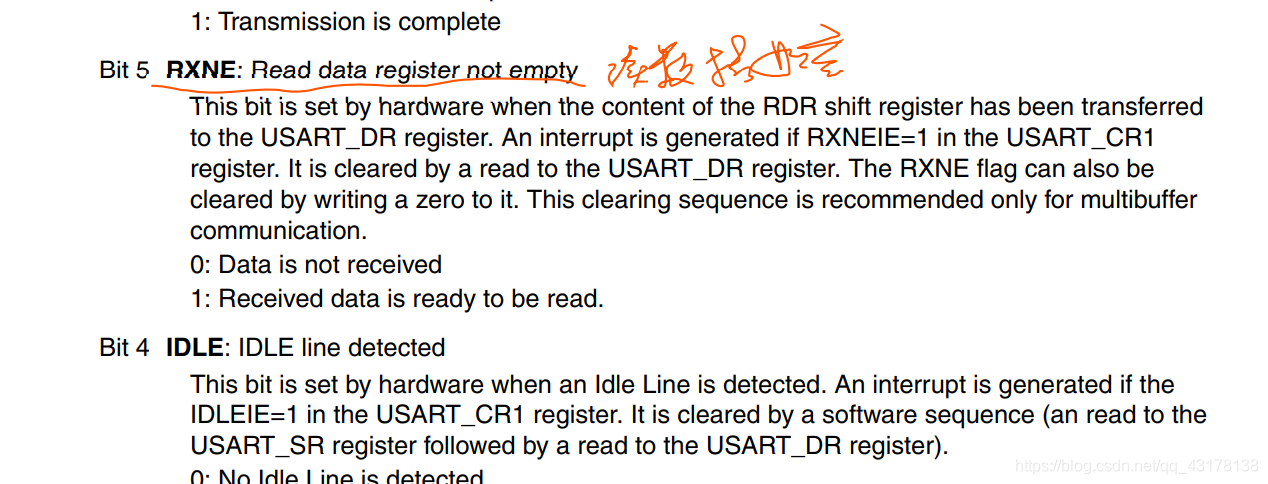
接收–>
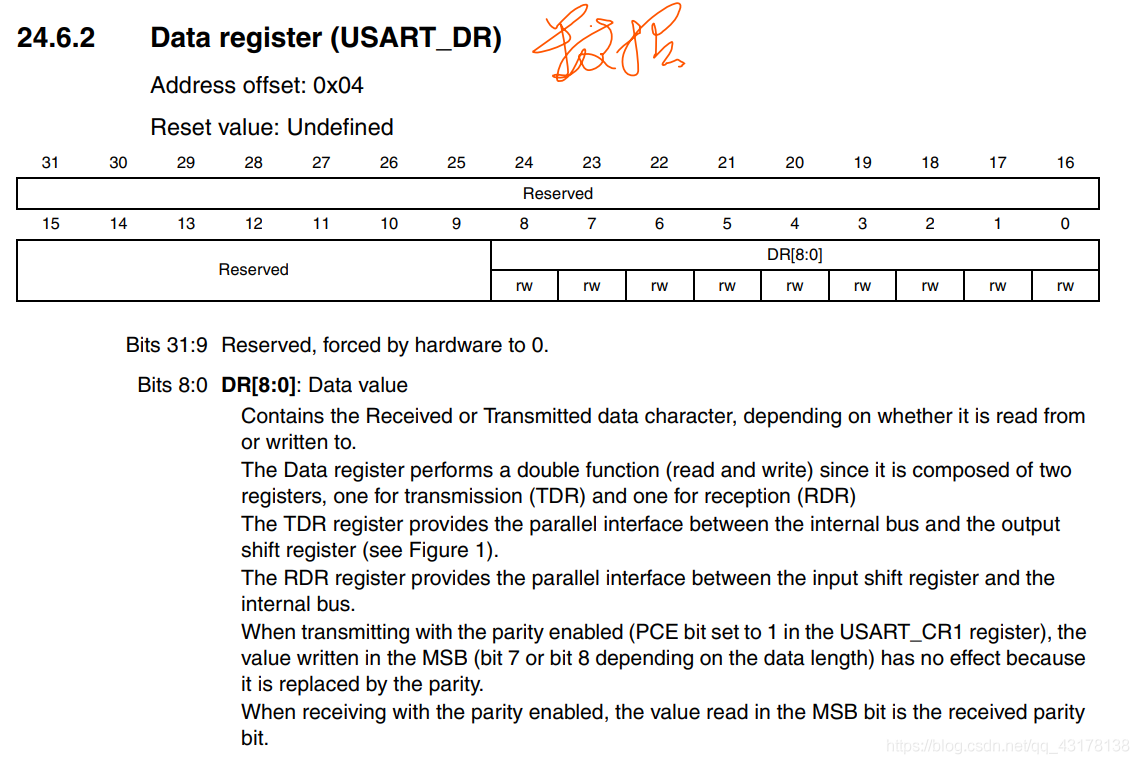
外部设备一个比特一个比特地传数据到RXD接收引脚,传输速度由波特率决定的,然后传到串行输入移位寄存器,传输完成后,一次性地将数据输入到数据缓存器,然后MCU内核就可以读取这个数据。
发送–>
MCU内核把要发的数据写到输出数据缓冲器,然后这个寄存器会一次把所有数据传给串行输出移位寄存器,然后把数据一位一位地按照定好的波特率传输给外部设备,通过TXD引脚。
串口异步通信需要定义的参数
起始位
数据位(8或者9位)
奇偶校验位(第9位)
停止位(1,15,2位)
波特率设置
接口和电平标准
补充
什么是TTL电平、CMOS电平、RS232电平?它们有什么区别呢?一般说来,CMOS电平比TTL电平有着更高的噪声容限。
1、TTL电平标准(是CPU使用的电平)
输出 L: <0.8V ; H:>2.4V。
输入 L: <1.2V ; H:>2.0V
TTL器件输出低电平要小于0.8V,高电平要大于2.4V。输入,低于1.2V就认为是0,高于2.0就认为是1。于是TTL电平的输入低电平的噪声容限就只有(0.8-0)/2=0.4V,高电平的噪声容限为(5-2.4)/2=1.3V。
2、CMOS电平标准
输出 L: <0.1
Vcc ; H:>0.9
Vcc。
输入 L: <0.3
Vcc ; H:>0.7
Vcc.
由于CMOS电源采用12V,则输入低于3.6V为低电平,噪声容限为1.8V,高于3.5V为高电平,噪声容限高为1.8V。比TTL有更高的噪声容限。
3、RS232标准
逻辑1的电平为-3~-15V,逻辑0的电平为+3~+15V,注意电平的定义反相了一次。
CAN
CAN 是Controller Area Network 的缩写(以下称为CAN),是ISO国际标准化的
串行通信协议
。在汽车产业中,出于对安全性、舒适性、方便性、低功耗、低成本的要求,各种各样的电子控制系统被开发了出来。由于这些系统之间通信所用的数据类型及对可靠性的要求不尽相同,由多条总线构成的情况很多,线束的数量也随之增加。为适应“减少线束的数量”、“通过多个LAN,进行大量数据的高速通信”的需要,1986 年德国电气商博世公司开发出面向汽车的CAN 通信协议。此后,CAN 通过ISO11898 及ISO11519 进行了标准化,在欧洲已是汽车网络的标准协议。
CAN 的高性能和可靠性已被认同,并被广泛地应用于工业自动化、船舶、医疗设备、工业设备等方面。现场总线是当今自动化领域技术发展的热点之一,被誉为自动化领域的计算机局域网。它的出现为分布式控制系统实现各节点之间实时、可靠的数据通信提供了强有力的技术支持。
CAN属于
现场总线
的范畴,它是一种有效
支持分布式控制
或
实时控制
的
串行通信网络
。较之许多RS-485基于R线构建的分布式控制系统而言,基于CAN总线的分布式控制系统在以下方面具有明显的优越性:
网络各节点之间的数据通信实时性强
开发周期短
……
接口
以太 外
USB 外
CAN 外
USART 外 RS232 RS485 RS422
PCI 内
PCIE 内
IDE 内
SPI 内
I2C 内
处理器与外部设备通信的两种方式:
并行通信
传输原理:数据的各个位同时传输
优点:速度快
缺点:占用引脚资源多
串行通信
传输原理:数据按位顺序传输
优点:占用引脚资源少
缺点:速度相对较慢
串行通信:
按照数据传送方向分为
单工
半双工
全双工
串行通信的通信方式:
同步通信
带时钟同步信号传输
SPI,IIC通信接口
异步通信
不带时钟同步信号
UART(使用异步收发器),单总线
常见的串行通信接口:
[tr]通信标准引脚说明通信方式通信方向[/tr]
USART(通用异步收发器)
TXD:发送端 、 RXD:接收端、GND:公共地
异步通信
全双工
单总线(1-wire)
DQ:发送/接收端
异步通信
半双工
SPI
SCK:同步时钟、MISO:主机输入,从机输出、MOSI:主机输出、从机输入
同步通信
全双工
I2C
SCL:同步时钟、SDA:数据输入/输出端
同步通信
半双工
串口应该就是串行通信接口
STM32的串口通信接口:
UART:同步异步收发器
USART:通用同步异步收发器
不过207的手册只找到了USART和I2C接口
UART/USART异步通信方式引脚连接方式:
RXD :数据输入引脚。数据接受。
TXD :数据发送引脚。数据发送。
假如芯片1、2的串口都是TTL电平的,GND要先共地,发送连接到接收。
电脑上的串口叫DB9,就是下图这样的:
假如将芯片和PC连接,DB9实际上是进行了一个电平转换,经过电平转换转换成DB9这种9针的接口,STM32的芯片也需要RS232转换器,转成232电平,这样才能连在一起。而不能直接将芯片的TTL直接连到电脑的DB9收发引脚,电平是不兼容的。
UART/USART异步通信特点:
全双工异步通信
分数波特率发生器系统、提供精确的波特率
可编程的数据字长度(8位或者9位)
可配置的停止位(支持1或者2位停止位)
可配置的使用DMA多缓冲器通信
单独的发送器和接收器使能位
检测标志:接收缓冲器、发送缓冲器空、传输结束标志
多个带标志的中断源。触发中断
其他:校验控制,四个错误检测标志
串口通信的过程:
接收–>
外部设备一个比特一个比特地传数据到RXD接收引脚,传输速度由波特率决定的,然后传到串行输入移位寄存器,传输完成后,一次性地将数据输入到数据缓存器,然后MCU内核就可以读取这个数据。
发送–>
MCU内核把要发的数据写到输出数据缓冲器,然后这个寄存器会一次把所有数据传给串行输出移位寄存器,然后把数据一位一位地按照定好的波特率传输给外部设备,通过TXD引脚。
串口异步通信需要定义的参数
起始位
数据位(8或者9位)
奇偶校验位(第9位)
停止位(1,15,2位)
波特率设置
接口和电平标准
补充
什么是TTL电平、CMOS电平、RS232电平?它们有什么区别呢?一般说来,CMOS电平比TTL电平有着更高的噪声容限。
1、TTL电平标准(是CPU使用的电平)
输出 L: <0.8V ; H:>2.4V。
输入 L: <1.2V ; H:>2.0V
TTL器件输出低电平要小于0.8V,高电平要大于2.4V。输入,低于1.2V就认为是0,高于2.0就认为是1。于是TTL电平的输入低电平的噪声容限就只有(0.8-0)/2=0.4V,高电平的噪声容限为(5-2.4)/2=1.3V。
2、CMOS电平标准
输出 L: <0.1
Vcc ; H:>0.9
Vcc。
输入 L: <0.3
Vcc ; H:>0.7
Vcc.
由于CMOS电源采用12V,则输入低于3.6V为低电平,噪声容限为1.8V,高于3.5V为高电平,噪声容限高为1.8V。比TTL有更高的噪声容限。
3、RS232标准
逻辑1的电平为-3~-15V,逻辑0的电平为+3~+15V,注意电平的定义反相了一次。
CAN
CAN 是Controller Area Network 的缩写(以下称为CAN),是ISO国际标准化的
串行通信协议
。在汽车产业中,出于对安全性、舒适性、方便性、低功耗、低成本的要求,各种各样的电子控制系统被开发了出来。由于这些系统之间通信所用的数据类型及对可靠性的要求不尽相同,由多条总线构成的情况很多,线束的数量也随之增加。为适应“减少线束的数量”、“通过多个LAN,进行大量数据的高速通信”的需要,1986 年德国电气商博世公司开发出面向汽车的CAN 通信协议。此后,CAN 通过ISO11898 及ISO11519 进行了标准化,在欧洲已是汽车网络的标准协议。
CAN 的高性能和可靠性已被认同,并被广泛地应用于工业自动化、船舶、医疗设备、工业设备等方面。现场总线是当今自动化领域技术发展的热点之一,被誉为自动化领域的计算机局域网。它的出现为分布式控制系统实现各节点之间实时、可靠的数据通信提供了强有力的技术支持。
CAN属于
现场总线
的范畴,它是一种有效
支持分布式控制
或
实时控制
的
串行通信网络
。较之许多RS-485基于R线构建的分布式控制系统而言,基于CAN总线的分布式控制系统在以下方面具有明显的优越性:
网络各节点之间的数据通信实时性强
开发周期短
……
接口
以太 外
USB 外
CAN 外
USART 外 RS232 RS485 RS422
PCI 内
PCIE 内
IDE 内
SPI 内
I2C 内
举报
更多回帖
rotate(-90deg);
回复
相关问答
CMOS电平
UART
异步
通信
方式
特点是
什么?
2021-12-07
1117
UART
异步
通信
方式引脚连接方法是什么?
2021-12-16
795
UART
异步
通信
方式的
特点
有哪些
2021-12-06
1380
STM32的
UART
特点
有哪些呢
2021-12-07
960
USART
配置的详细步骤有哪些
2021-12-06
2050
串口
通信
基本原理是什么?
2022-02-18
2080
常见的
通信
方式有哪些?
2022-02-18
2840
串行
通信
的
通信
方式是什么?常见的串行
通信
接口有哪些?
2021-12-03
3280
什么是
USART
?工作原理是什么?具有哪些
特点
?
2021-12-13
1379
USART
异步
通信
同步
异步
有什么区别呢
2021-12-10
1399
发帖
登录/注册
20万+
工程师都在用,
免费
PCB检查工具
无需安装、支持浏览器和手机在线查看、实时共享
查看
点击登录
登录更多精彩功能!
首页
论坛版块
小组
免费开发板试用
ebook
直播
搜索
登录
×
20
完善资料,
赚取积分


 举报
举报



