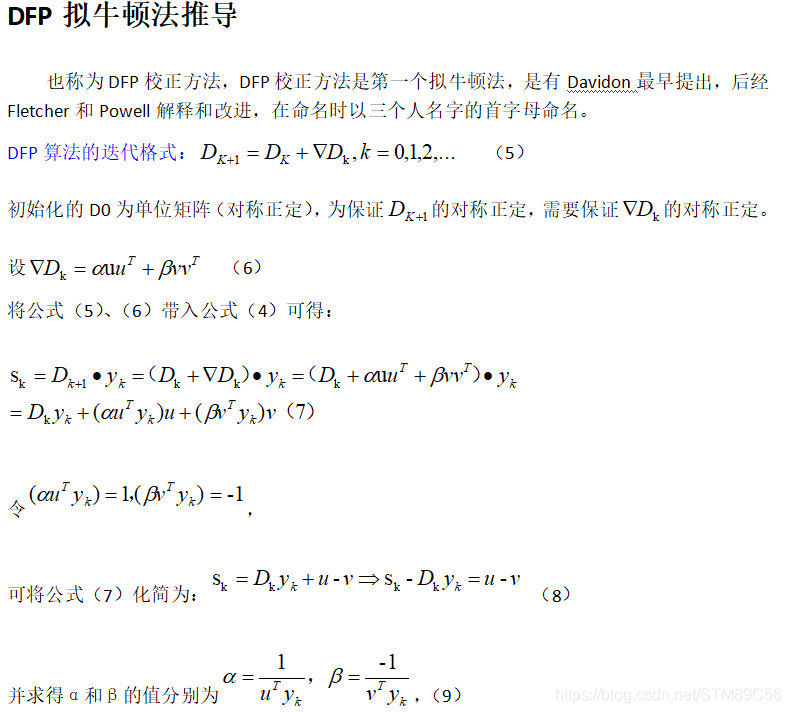
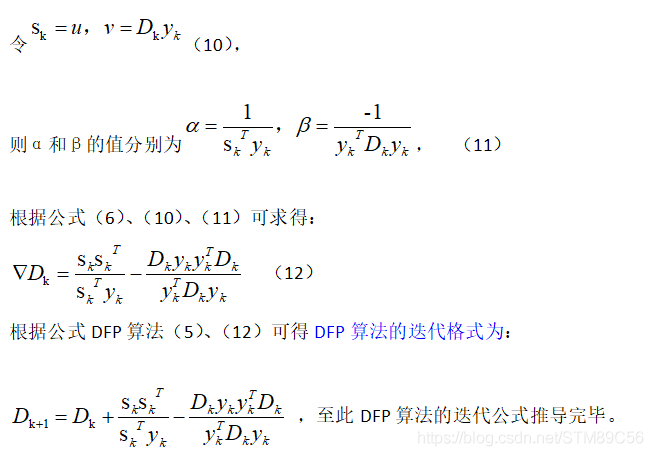
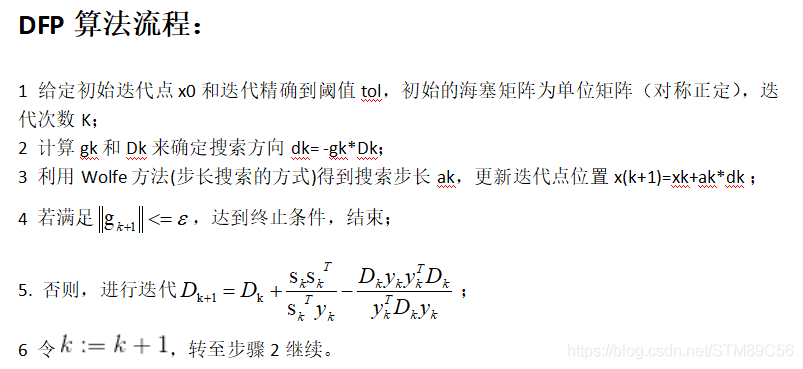
DFP算法原理
由于博主使用WPS编辑的文本,公式无法赋值粘贴,这里以截图的方法给出了推导过程。博主会上传该DOC文档。
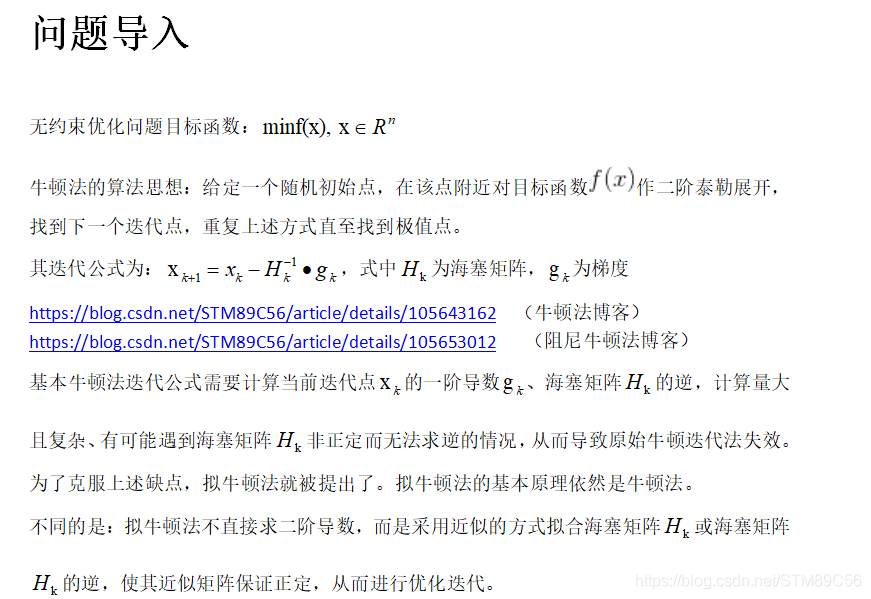
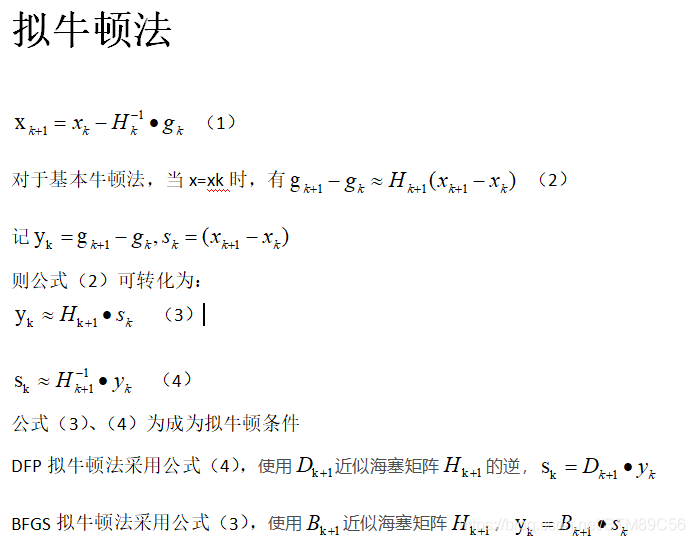
牛顿法
阻尼牛顿法
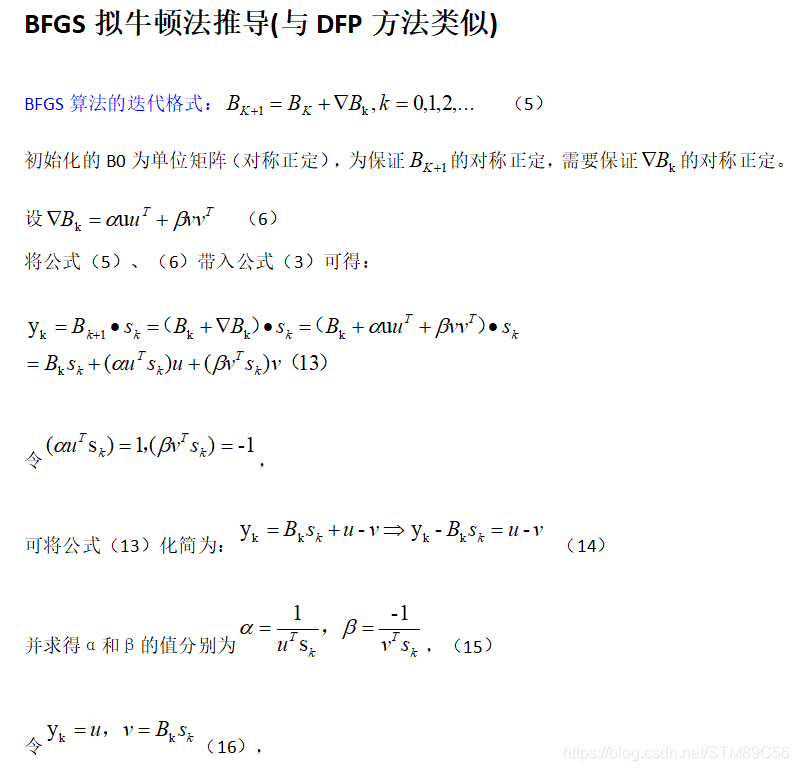
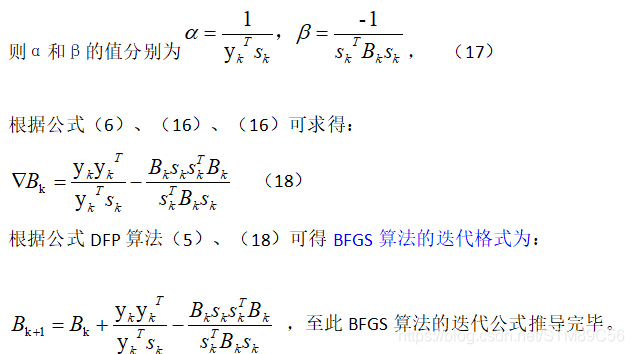
 BFGS算法原理
BFGS算法原理
matlab代码(DFP)
syms x1 x2
f=@(x1,x2) x1.^2+x2.^2-x1*x2-10*x1-4*x2+60;
X=DFP(f,[0 0],1e-8,100)
function x=DFP(f,x0,eps,k)
%目标函数f
%初始迭代点x0
%迭代精度eps
%迭代次数K
x0=x0';
TiDu=matlabFunction(gradient(sym(f)));
m=length(x0);
H=eye(m);%构造初始海塞矩阵
%写出函数值,梯度值的表达式
f_cal='f(x0(1),x0(2))'; %初始点函数值
tidu_cal='TiDu(x0(1),x0(2))';
f1_cal='f(x_1(1),x_1(2))';%下一点函数值
%% 从第一个点计算到第二个点
f_x0=eval(f_cal);%计算初始点函数值
tidu_x0=eval(tidu_cal);%计算初始点梯度值
if norm(tidu_x0) < eps%判断是否满足终止条件
x=x0;
return;
end
d=-A*tidu_x0;% 下降方向
syms alfa %定义步长
x_1=x0+alfa*d;%更新迭代点位置
f_x1=eval(f1_cal);%计算迭代点的函数表达式
df_x1=diff(f_x1);%迭代点的梯度表达式
dalfa=double(solve(df_x1));%求解,得到步长alfa
x0=x0+dalfa*d;%更新初始点
tidu_x1=eval(tidu_cal);%计算该点梯度
n=1;
while n < k && norm(tidu_x1) > eps
delta_x=dalfa*d; %计算sK
delta_g=tidu_x1-tidu_x0; %计算yk
delta_H=delta_x*delta_x'/(delta_x'*delta_g)- H*delta_g*delta_g'*H/(delta_g'*H*delta_g); %计算delta_Dk
H=H+delta_H; %dfp迭代公式
tidu_x0=tidu_x1; %将该点梯度作为新的初始点继续迭代
d=-A*tidu_x0;% 下降方向
syms alfa
x_1=x0+alfa*d;
f_x1=eval(f1_cal);
df_x1=diff(f_x1);
dalfa=double(solve(df_x1));
x0=x0+dalfa*d;
tidu_x1=eval(tidu_cal);
end
x=x0;
end
matlab代码(BFGS)
%% BFGS算法与DFP算法过程类似,只是迭代函数不同
clc
clear
syms x1 x2
f=@(x1,x2) x1.^2+x2.^2-x1*x2-10*x1-4*x2+60;
X=BFGS(f,[0 0],1e-8,100)
function x=BFGS(f,x0,eps,k)
x0=x0';
TiDu=matlabFunction(gradient(sym(f)));
m=length(x0);
A=eye(m);%构造初始矩阵
f_cal='f(x0(1),x0(2))';
tidu_cal='TiDu(x0(1),x0(2))';
f1_cal='f(x_1(1),x_1(2))';
%从第一个点计算到第二个点
f_x0=eval(f_cal);
tidu_x0=eval(tidu_cal);
if norm(tidu_x0) < eps
x=x0;
return;
end
d=-A*tidu_x0;% 下降方向
syms alfa
x_1=x0+alfa*d;
f_x1=eval(f1_cal);
df_x1=diff(f_x1);
dalfa=double(solve(df_x1));
x0=x0+dalfa*d;
tidu_x1=eval(tidu_cal);
n=1;
while n < k && norm(tidu_x1) > eps
delta_x=dalfa*d;
delta_g=tidu_x1-tidu_x0;
delta_A=-A*delta_x*delta_x'*A/(delta_x'*A*delta_x)+delta_g*delta_g'/(delta_g'*delta_x);
A=A+delta_A;
tidu_x0=tidu_x1;
d=-A*tidu_x0;% 下降方向
syms alfa
x_1=x0+alfa*d;
f_x1=eval(f1_cal);
df_x1=diff(f_x1);
dalfa=double(solve(df_x1));
x0=x0+dalfa*d;
tidu_x1=eval(tidu_cal);
end
x=x0;
end
DFP算法原理
由于博主使用WPS编辑的文本,公式无法赋值粘贴,这里以截图的方法给出了推导过程。博主会上传该DOC文档。
牛顿法
阻尼牛顿法
BFGS算法原理
matlab代码(DFP)
syms x1 x2
f=@(x1,x2) x1.^2+x2.^2-x1*x2-10*x1-4*x2+60;
X=DFP(f,[0 0],1e-8,100)
function x=DFP(f,x0,eps,k)
%目标函数f
%初始迭代点x0
%迭代精度eps
%迭代次数K
x0=x0';
TiDu=matlabFunction(gradient(sym(f)));
m=length(x0);
H=eye(m);%构造初始海塞矩阵
%写出函数值,梯度值的表达式
f_cal='f(x0(1),x0(2))'; %初始点函数值
tidu_cal='TiDu(x0(1),x0(2))';
f1_cal='f(x_1(1),x_1(2))';%下一点函数值
%% 从第一个点计算到第二个点
f_x0=eval(f_cal);%计算初始点函数值
tidu_x0=eval(tidu_cal);%计算初始点梯度值
if norm(tidu_x0) < eps%判断是否满足终止条件
x=x0;
return;
end
d=-A*tidu_x0;% 下降方向
syms alfa %定义步长
x_1=x0+alfa*d;%更新迭代点位置
f_x1=eval(f1_cal);%计算迭代点的函数表达式
df_x1=diff(f_x1);%迭代点的梯度表达式
dalfa=double(solve(df_x1));%求解,得到步长alfa
x0=x0+dalfa*d;%更新初始点
tidu_x1=eval(tidu_cal);%计算该点梯度
n=1;
while n < k && norm(tidu_x1) > eps
delta_x=dalfa*d; %计算sK
delta_g=tidu_x1-tidu_x0; %计算yk
delta_H=delta_x*delta_x'/(delta_x'*delta_g)- H*delta_g*delta_g'*H/(delta_g'*H*delta_g); %计算delta_Dk
H=H+delta_H; %dfp迭代公式
tidu_x0=tidu_x1; %将该点梯度作为新的初始点继续迭代
d=-A*tidu_x0;% 下降方向
syms alfa
x_1=x0+alfa*d;
f_x1=eval(f1_cal);
df_x1=diff(f_x1);
dalfa=double(solve(df_x1));
x0=x0+dalfa*d;
tidu_x1=eval(tidu_cal);
end
x=x0;
end
matlab代码(BFGS)
%% BFGS算法与DFP算法过程类似,只是迭代函数不同
clc
clear
syms x1 x2
f=@(x1,x2) x1.^2+x2.^2-x1*x2-10*x1-4*x2+60;
X=BFGS(f,[0 0],1e-8,100)
function x=BFGS(f,x0,eps,k)
x0=x0';
TiDu=matlabFunction(gradient(sym(f)));
m=length(x0);
A=eye(m);%构造初始矩阵
f_cal='f(x0(1),x0(2))';
tidu_cal='TiDu(x0(1),x0(2))';
f1_cal='f(x_1(1),x_1(2))';
%从第一个点计算到第二个点
f_x0=eval(f_cal);
tidu_x0=eval(tidu_cal);
if norm(tidu_x0) < eps
x=x0;
return;
end
d=-A*tidu_x0;% 下降方向
syms alfa
x_1=x0+alfa*d;
f_x1=eval(f1_cal);
df_x1=diff(f_x1);
dalfa=double(solve(df_x1));
x0=x0+dalfa*d;
tidu_x1=eval(tidu_cal);
n=1;
while n < k && norm(tidu_x1) > eps
delta_x=dalfa*d;
delta_g=tidu_x1-tidu_x0;
delta_A=-A*delta_x*delta_x'*A/(delta_x'*A*delta_x)+delta_g*delta_g'/(delta_g'*delta_x);
A=A+delta_A;
tidu_x0=tidu_x1;
d=-A*tidu_x0;% 下降方向
syms alfa
x_1=x0+alfa*d;
f_x1=eval(f1_cal);
df_x1=diff(f_x1);
dalfa=double(solve(df_x1));
x0=x0+dalfa*d;
tidu_x1=eval(tidu_cal);
end
x=x0;
end

 举报
举报




