一、AD7766描述
ADI公司官网https://www.analog.com/cn/products/ad7766.html#product-overview
1.过采样逐次逼近(SAR)型架构
2.高性能交流和直流精度、低功耗
动态范围:115.5 dB(32 kSPS,AD7766-2)
动态范围:112.5 dB(64 kSPS,AD7766-1)
动态范围:109.5 dB(128 kSPS, AD7766)
总谐波失真(THD):-112 dB
3.超低功耗
8.5 mW,32 kSPS (AD7766-2)
10.5 mW,64 kSPS (AD7766-1)
15 mW,128 kSPS (AD7766)
4.高直流精度
24位、无失码(NMC)
积分非线性(INL):±6 ppm(典型值),±15 ppm(最大值)
5.低温漂
零误差漂移:15 nV/°C
增益误差漂移:0.4ppm/°C
 AD7766采样电压为差分信号输入Vin+ 、Vin-
差分共模电压为输入基准电压的一半=VREF+/2
差分输入电压范围ΔV=(Vin+) - (Vin-) 在基准电压VREF+内变化
二、硬件连接
单片机:STM32f407VET6
AD7766采样电压为差分信号输入Vin+ 、Vin-
差分共模电压为输入基准电压的一半=VREF+/2
差分输入电压范围ΔV=(Vin+) - (Vin-) 在基准电压VREF+内变化
二、硬件连接
单片机:STM32f407VET6
 控制原理:
1.初始化,详情见程序
2.工作时,MCLK引脚用单片机定时器PWM持续不断提供80Khz脉冲(最高可给1Mhz),AD7766采样到数据后,DRDY引脚会给一个高脉冲,通知单片机读取数据,如图:
控制原理:
1.初始化,详情见程序
2.工作时,MCLK引脚用单片机定时器PWM持续不断提供80Khz脉冲(最高可给1Mhz),AD7766采样到数据后,DRDY引脚会给一个高脉冲,通知单片机读取数据,如图:
 单片机设置外部中断输入模式,收到高脉冲信号后,进入外部中断,在中断程序里启动SPI读取AD7766数据,如图:
单片机设置外部中断输入模式,收到高脉冲信号后,进入外部中断,在中断程序里启动SPI读取AD7766数据,如图:
 3.AD7766采样率=MCLK/8,MCLK最高为1Mhz,AD7766采样率最高125KSPS
三、软件编程
3.AD7766采样率=MCLK/8,MCLK最高为1Mhz,AD7766采样率最高125KSPS
三、软件编程
SPI.C
SPI初始化,配置为主模式双向全双工模式
#include "spi.h"
u8 SPI1_RX_Buffer[3]; //SPI接收数据存储区
// ****************************************************** SPI1 ********************************************************************************************
//SPI初始化 读取AD7766电压值
//PA5 初始化 复用SPI1_SCK
//PA6 初始化 复用SPI1_MISO
//SPI1 RCC_APB2=84M
void SPI1_Init(void)
{
GPIO_InitTypeDef GPIO_InitStructure;
SPI_InitTypeDef SPI_InitStructure;
RCC_AHB1PeriphClockCmd(RCC_AHB1Periph_GPIOA, ENABLE);//使能GPIOA时钟
RCC_APB2PeriphClockCmd(RCC_APB2Periph_SPI1, ENABLE);//使能SPI1时钟
//GPIO初始化设置
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_5|GPIO_Pin_6;//PA5/6复用功能输出
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF;//复用功能
GPIO_InitStructure.GPIO_OType = GPIO_OType_PP;//推挽输出
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;//100MHz
GPIO_InitStructure.GPIO_PuPd = GPIO_PuPd_UP;//上拉
GPIO_Init(GPIOA, &GPIO_InitStructure);//初始化
GPIO_PinAFConfig(GPIOA,GPIO_PinSource5,GPIO_AF_SPI1); //PA5复用为 SPI1_SCK
GPIO_PinAFConfig(GPIOA,GPIO_PinSource6,GPIO_AF_SPI1); //PA6复用为 SPI1_MISO
//这里只针对SPI口初始化
RCC_APB2PeriphResetCmd(RCC_APB2Periph_SPI1,ENABLE);//复位SPI1
RCC_APB2PeriphResetCmd(RCC_APB2Periph_SPI1,DISABLE);//停止复位SPI1
//SPI_Direction_2Lines_FullDuplex //SPI_Direction_2Lines_RxOnly
SPI_InitStructure.SPI_Direction = SPI_Direction_2Lines_FullDuplex; //设置SPI单向或者双向的数据模式:SPI设置为双线双向全双工
SPI_InitStructure.SPI_Mode = SPI_Mode_Master; //设置SPI工作模式:设置为主SPI
SPI_InitStructure.SPI_DataSize = SPI_DataSize_8b; //设置SPI的数据大小:SPI发送接收8位帧结构
SPI_InitStructure.SPI_CPOL = SPI_CPOL_High; //串行同步时钟的空闲状态为高电平
SPI_InitStructure.SPI_CPHA = SPI_CPHA_1Edge; //串行同步时钟的第一个跳变沿(上升或下降)数据被采样
SPI_InitStructure.SPI_NSS = SPI_NSS_Soft; //NSS信号由硬件(NSS管脚)还是软件(使用SSI位)管理:内部NSS信号有SSI位控制
SPI_InitStructure.SPI_BaudRatePrescaler = SPI_BaudRatePrescaler_8; //定义波特率预分频的值:波特率预分频值为16 84M/16=5.25MHz 84M/32=2.625MHz
SPI_InitStructure.SPI_FirstBit = SPI_FirstBit_MSB; //指定数据传输从MSB位还是LSB位开始:数据传输从MSB位开始
SPI_InitStructure.SPI_CRCPolynomial = 7; //CRC值计算的多项式
SPI_Init(SPI1, &SPI_InitStructure); //根据SPI_InitStruct中指定的参数初始化外设SPIx寄存器
SPI_Cmd(SPI1, ENABLE); //使能SPI外设 SPE=1
// SPI_Cmd(SPI1, DISABLE); //失能SPI外设 SPE=0
}
//SPI1 读写一个字节
//TxData:要写入的字节
//返回值:读取到的字节
u8 SPI1_ReadWriteByte(u8 TxData) //SPI1 读写一个字节
{
while((SPI1->SR&1<<1)==0); //等待发送区空
SPI1->DR=TxData; //发送一个byte
while((SPI1->SR&1<<0)==0); //等待接收完一个byte
return SPI1->DR; //返回收到的数据
}
//SPI1接收3个字节
//返回值:24位有效数据
u32 SPI1_AD7766_Read(void) //通过SPI1读AD7766电压值
{
SPI1_RX_Buffer[0]= SPI1_ReadWriteByte(0XFF); //通过SPIx接收数据
SPI1_RX_Buffer[1]= SPI1_ReadWriteByte(0XFF); //通过SPIx接收数据
SPI1_RX_Buffer[2]= SPI1_ReadWriteByte(0XFF); //通过SPIx接收数据
return (SPI1_RX_Buffer[0]<<16 | SPI1_RX_Buffer[1]<<8 | SPI1_RX_Buffer[2])&0XFFFFFF;
}
SPI.h
#ifndef __SPI_H
#define __SPI_H
#include "sys.h"
#include "ad7766.h"
#include "led.h"
#include "gpio.h"
/* SPI1 */
void SPI1_Init(void); //初始化SPI口
u8 SPI1_ReadWriteByte(u8 TxData);
u32 SPI1_AD7766_Read(void); //通过SPI读AD7766电压值
#endif
AD7766.C
AD7766初始化,配置外部输入下降沿中断,在中断函数中触发SPI接收数据
#include "ad7766.h"
//PA3 AD7766_RDY 外部下降沿中断 中断优先级 主0子1
//PA4 AD7766_CS 上拉推挽输出
//PB0 AD7766_SYNC 上拉推挽输出
void AD7766_GPIOConfig(void) //AD7766初始化
{
GPIO_InitTypeDef GPIO_InitStructure;
EXTI_InitTypeDef EXTI_InitStructure;
NVIC_InitTypeDef NVIC_InitStructure;
RCC_AHB1PeriphClockCmd(RCC_AHB1Periph_GPIOA | RCC_AHB1Periph_GPIOB | RCC_AHB1Periph_GPIOE, ENABLE);//使能GPIO时钟
RCC_APB2PeriphClockCmd(RCC_APB2Periph_SYSCFG, ENABLE);//使能SYSCFG时钟
//GPIO初始化设置
GPIO_InitStructure.GPIO_Pin =GPIO_Pin_4; // PA4 AD7766_CS
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_OUT;//
GPIO_InitStructure.GPIO_OType = GPIO_OType_PP;//推挽输出
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;//50MHz
GPIO_InitStructure.GPIO_PuPd = GPIO_PuPd_UP;//上拉
GPIO_Init(GPIOA, &GPIO_InitStructure);//初始化
//GPIO初始化设置
GPIO_InitStructure.GPIO_Pin =GPIO_Pin_0; // PB0 AD7766_SYNC
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_OUT;//
GPIO_InitStructure.GPIO_OType = GPIO_OType_PP;//推挽输出
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;//50MHz
GPIO_InitStructure.GPIO_PuPd = GPIO_PuPd_UP;//上拉
GPIO_Init(GPIOB, &GPIO_InitStructure);//初始化
//GPIO初始化设置 AD7766_RDY
GPIO_InitStructure.GPIO_Pin =GPIO_Pin_3; //PA3 AD7766_RDY 外部下降沿中断
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_IN;//输入
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;//50MHz
GPIO_InitStructure.GPIO_PuPd = GPIO_PuPd_UP;//上拉
GPIO_Init(GPIOA, &GPIO_InitStructure);//初始化
/*配置RDY为外部中断*/
SYSCFG_EXTILineConfig(EXTI_PortSourceGPIOA, EXTI_PinSource3);//PA3 AD7766_RDY 连接到中断线3 RDY使用外部中断
/* 配置EXTI_Line3 */
EXTI_InitStructure.EXTI_Line = EXTI_Line3;//LINE3
EXTI_InitStructure.EXTI_Mode = EXTI_Mode_Interrupt;//中断事件
EXTI_InitStructure.EXTI_Trigger = EXTI_Trigger_Falling; //下降沿触发
EXTI_InitStructure.EXTI_LineCmd = ENABLE;//使能
EXTI_Init(&EXTI_InitStructure);//配置
NVIC_InitStructure.NVIC_IRQChannel = EXTI3_IRQn;//外部中断
NVIC_InitStructure.NVIC_IRQChannelPreemptionPriority = 0;//抢占优先级0
NVIC_InitStructure.NVIC_IRQChannelSubPriority = 1;//子优先级1
NVIC_InitStructure.NVIC_IRQChannelCmd = ENABLE;//使能外部中断通道
NVIC_Init(&NVIC_InitStructure);//配置
}
//rate=10 表示AD7766采样率为10K MClK=80K
void SetSamplingRate(u8 rate) //开启TIM3_PWM时序 供AD7766_MCLK
{
u16 mclk;
mclk=rate<<3; //rate=10 mclk=80
TIM_Cmd(TIM3, DISABLE); //TIM3 失能
//PWM模式
// 84M/21=4M=0.25us (4000/80)*0.25us=12.5us=80K
TIM3_PWM_Config(4000/mclk-1,21-1); //TIM3初始化配置 且使能
TIM_SetCompare1(TIM3,2000/mclk); //设置占空比50% CCR1= 2000/mclk
// TIM_SetCompare2(TIM3,2000/mclk); //设置占空比50% CCR2= 2000/mclk
}
void AD7766_PowerDown(void) //关断AD7766数据传输
{
AD7766_SYNC=0; //关断引脚 DRDY引脚一直输出高电平
}
void AD7766_WakeUp(void) //开启/复位AD77数据传输
{
AD7766_SYNC=1; //AD7766开启复位
while(AD7766_RDY==0); //等待复位完成 进入外部中断,清零标志位
delay_ms(10);
AD7766_CS=0; //打开片选引脚
delay_ms(10);
}
void AD7766_Init(void)
{
//PA5 SPI1_SCK
//PA6 SPI1_MISO
SPI1_Init(); //SPI初始化 读取AD7766电压值
//PA3 AD7766_RDY 外部下降沿中断 中断优先级 主0子1
//PA4 AD7766_CS 上拉推挽输出
//PB0 AD7766_SYNC 上拉推挽输出
AD7766_GPIOConfig(); //AD7766引脚初始化
//10 表示AD7766采样率为10K MClK=80K
SetSamplingRate(10); //开启TIM3_PWM时序 供AD7766_MCLK
AD7766_PowerDown(); //关断AD7766数据传输
AD7766_WakeUp(); //开启/复位AD77数据传输 cs拉低
}
AD7766.H
#ifndef __AD7766_H
#define __AD7766_H
#include "spi.h"
#include "sys.h"
#include "delay.h"
#include "led.h"
#include "timer.h"
#define AD7766_CS PAout(4) //上拉输出 片选引脚AD7766_CS=0; 0有效
#define AD7766_RDY PAin(3) //外部中断 数据就绪引脚
#define AD7766_SYNC PBout(0) //上拉输出 关断/复位/同步引脚
void AD7766_GPIOConfig(void);
void AD7766_Init(void);
void AD7766_PowerDown(void);
void AD7766_WakeUp(void);
#endif
外部中断.c
在中断函数中启动SPI读取数据,双向全双工模式下,SPI发送3个任意字节数据,同时接收3个字节的目标数据
u32 VoltageBuffer; //压力值
//外部中断 AD7766 DRDY数据输出就绪
//外部中断频率=采样率 10K=100us=0.1ms
void EXTI3_IRQHandler(void) //读取AD7766压力值
{
VoltageBuffer=SPI1_AD7766_Read(); //获取AD7766压力值 赋值压力值 缓存区数组VoltageBuffer1
EXTI_ClearITPendingBit(EXTI_Line3);//清除LINE3上的中断标志位
}
main.c
串口打印采集到的AD7766原始AD值
int main(void)
{
NVIC_PriorityGroupConfig(NVIC_PriorityGroup_2);
delay_init(168);
/*串口1*/
uart1_init(115200); //串口1/UART1
printf("开机运行rn");
LED_Init(); //LED初始化 PD10
AD7766_Init();
printf("初始化完成rn");
while(1)
{
printf("采集AD7766原始值为=%drn",VoltageBuffer);
delay_ms(100);
}
}
四、AD7766采样分析
用逻辑分析仪查看AD7766 SPI通信引脚
 通道0不是CS脚,而是DRDY引脚,CS脚在初始化时被设置为零。
本次AD7766采样值为0XFF
五、结果转换
通道0不是CS脚,而是DRDY引脚,CS脚在初始化时被设置为零。
本次AD7766采样值为0XFF
五、结果转换
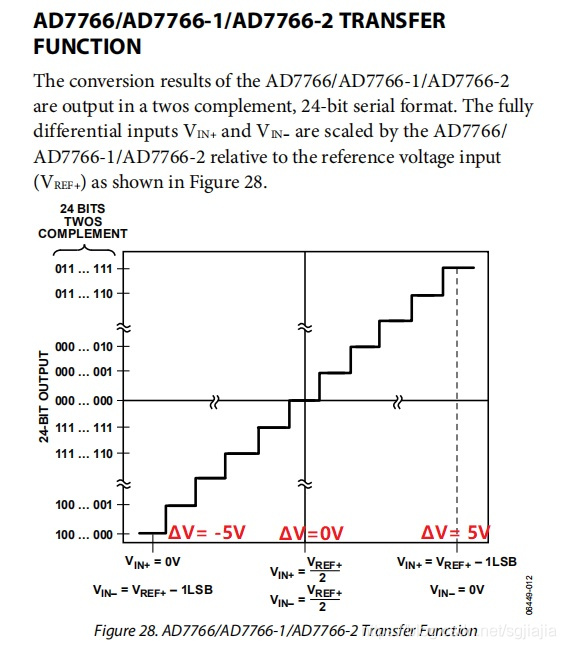 因为此次电路图中AD7766的参考电压为5V,则ΔV=(Vin﹢) - (Vin-)的输入电压范围为 -5V 到 5V。如图可知,单片机从AD7766读取到的值根据输入电压值分贝对应在0X8FFFFF-0XFFFFFF(负值),0X000000~0X7FFFFF(正值)范围内变化。
因为此次电路图中AD7766的参考电压为5V,则ΔV=(Vin﹢) - (Vin-)的输入电压范围为 -5V 到 5V。如图可知,单片机从AD7766读取到的值根据输入电压值分贝对应在0X8FFFFF-0XFFFFFF(负值),0X000000~0X7FFFFF(正值)范围内变化。
一、AD7766描述
ADI公司官网https://www.analog.com/cn/products/ad7766.html#product-overview
1.过采样逐次逼近(SAR)型架构
2.高性能交流和直流精度、低功耗
动态范围:115.5 dB(32 kSPS,AD7766-2)
动态范围:112.5 dB(64 kSPS,AD7766-1)
动态范围:109.5 dB(128 kSPS, AD7766)
总谐波失真(THD):-112 dB
3.超低功耗
8.5 mW,32 kSPS (AD7766-2)
10.5 mW,64 kSPS (AD7766-1)
15 mW,128 kSPS (AD7766)
4.高直流精度
24位、无失码(NMC)
积分非线性(INL):±6 ppm(典型值),±15 ppm(最大值)
5.低温漂
零误差漂移:15 nV/°C
增益误差漂移:0.4ppm/°C
AD7766采样电压为差分信号输入Vin+ 、Vin-
差分共模电压为输入基准电压的一半=VREF+/2
差分输入电压范围ΔV=(Vin+) - (Vin-) 在基准电压VREF+内变化
二、硬件连接
单片机:STM32f407VET6
控制原理:
1.初始化,详情见程序
2.工作时,MCLK引脚用单片机定时器PWM持续不断提供80Khz脉冲(最高可给1Mhz),AD7766采样到数据后,DRDY引脚会给一个高脉冲,通知单片机读取数据,如图:
单片机设置外部中断输入模式,收到高脉冲信号后,进入外部中断,在中断程序里启动SPI读取AD7766数据,如图:
3.AD7766采样率=MCLK/8,MCLK最高为1Mhz,AD7766采样率最高125KSPS
三、软件编程
SPI.C
SPI初始化,配置为主模式双向全双工模式
#include "spi.h"
u8 SPI1_RX_Buffer[3]; //SPI接收数据存储区
// ****************************************************** SPI1 ********************************************************************************************
//SPI初始化 读取AD7766电压值
//PA5 初始化 复用SPI1_SCK
//PA6 初始化 复用SPI1_MISO
//SPI1 RCC_APB2=84M
void SPI1_Init(void)
{
GPIO_InitTypeDef GPIO_InitStructure;
SPI_InitTypeDef SPI_InitStructure;
RCC_AHB1PeriphClockCmd(RCC_AHB1Periph_GPIOA, ENABLE);//使能GPIOA时钟
RCC_APB2PeriphClockCmd(RCC_APB2Periph_SPI1, ENABLE);//使能SPI1时钟
//GPIO初始化设置
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_5|GPIO_Pin_6;//PA5/6复用功能输出
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF;//复用功能
GPIO_InitStructure.GPIO_OType = GPIO_OType_PP;//推挽输出
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;//100MHz
GPIO_InitStructure.GPIO_PuPd = GPIO_PuPd_UP;//上拉
GPIO_Init(GPIOA, &GPIO_InitStructure);//初始化
GPIO_PinAFConfig(GPIOA,GPIO_PinSource5,GPIO_AF_SPI1); //PA5复用为 SPI1_SCK
GPIO_PinAFConfig(GPIOA,GPIO_PinSource6,GPIO_AF_SPI1); //PA6复用为 SPI1_MISO
//这里只针对SPI口初始化
RCC_APB2PeriphResetCmd(RCC_APB2Periph_SPI1,ENABLE);//复位SPI1
RCC_APB2PeriphResetCmd(RCC_APB2Periph_SPI1,DISABLE);//停止复位SPI1
//SPI_Direction_2Lines_FullDuplex //SPI_Direction_2Lines_RxOnly
SPI_InitStructure.SPI_Direction = SPI_Direction_2Lines_FullDuplex; //设置SPI单向或者双向的数据模式:SPI设置为双线双向全双工
SPI_InitStructure.SPI_Mode = SPI_Mode_Master; //设置SPI工作模式:设置为主SPI
SPI_InitStructure.SPI_DataSize = SPI_DataSize_8b; //设置SPI的数据大小:SPI发送接收8位帧结构
SPI_InitStructure.SPI_CPOL = SPI_CPOL_High; //串行同步时钟的空闲状态为高电平
SPI_InitStructure.SPI_CPHA = SPI_CPHA_1Edge; //串行同步时钟的第一个跳变沿(上升或下降)数据被采样
SPI_InitStructure.SPI_NSS = SPI_NSS_Soft; //NSS信号由硬件(NSS管脚)还是软件(使用SSI位)管理:内部NSS信号有SSI位控制
SPI_InitStructure.SPI_BaudRatePrescaler = SPI_BaudRatePrescaler_8; //定义波特率预分频的值:波特率预分频值为16 84M/16=5.25MHz 84M/32=2.625MHz
SPI_InitStructure.SPI_FirstBit = SPI_FirstBit_MSB; //指定数据传输从MSB位还是LSB位开始:数据传输从MSB位开始
SPI_InitStructure.SPI_CRCPolynomial = 7; //CRC值计算的多项式
SPI_Init(SPI1, &SPI_InitStructure); //根据SPI_InitStruct中指定的参数初始化外设SPIx寄存器
SPI_Cmd(SPI1, ENABLE); //使能SPI外设 SPE=1
// SPI_Cmd(SPI1, DISABLE); //失能SPI外设 SPE=0
}
//SPI1 读写一个字节
//TxData:要写入的字节
//返回值:读取到的字节
u8 SPI1_ReadWriteByte(u8 TxData) //SPI1 读写一个字节
{
while((SPI1->SR&1<<1)==0); //等待发送区空
SPI1->DR=TxData; //发送一个byte
while((SPI1->SR&1<<0)==0); //等待接收完一个byte
return SPI1->DR; //返回收到的数据
}
//SPI1接收3个字节
//返回值:24位有效数据
u32 SPI1_AD7766_Read(void) //通过SPI1读AD7766电压值
{
SPI1_RX_Buffer[0]= SPI1_ReadWriteByte(0XFF); //通过SPIx接收数据
SPI1_RX_Buffer[1]= SPI1_ReadWriteByte(0XFF); //通过SPIx接收数据
SPI1_RX_Buffer[2]= SPI1_ReadWriteByte(0XFF); //通过SPIx接收数据
return (SPI1_RX_Buffer[0]<<16 | SPI1_RX_Buffer[1]<<8 | SPI1_RX_Buffer[2])&0XFFFFFF;
}
SPI.h
#ifndef __SPI_H
#define __SPI_H
#include "sys.h"
#include "ad7766.h"
#include "led.h"
#include "gpio.h"
/* SPI1 */
void SPI1_Init(void); //初始化SPI口
u8 SPI1_ReadWriteByte(u8 TxData);
u32 SPI1_AD7766_Read(void); //通过SPI读AD7766电压值
#endif
AD7766.C
AD7766初始化,配置外部输入下降沿中断,在中断函数中触发SPI接收数据
#include "ad7766.h"
//PA3 AD7766_RDY 外部下降沿中断 中断优先级 主0子1
//PA4 AD7766_CS 上拉推挽输出
//PB0 AD7766_SYNC 上拉推挽输出
void AD7766_GPIOConfig(void) //AD7766初始化
{
GPIO_InitTypeDef GPIO_InitStructure;
EXTI_InitTypeDef EXTI_InitStructure;
NVIC_InitTypeDef NVIC_InitStructure;
RCC_AHB1PeriphClockCmd(RCC_AHB1Periph_GPIOA | RCC_AHB1Periph_GPIOB | RCC_AHB1Periph_GPIOE, ENABLE);//使能GPIO时钟
RCC_APB2PeriphClockCmd(RCC_APB2Periph_SYSCFG, ENABLE);//使能SYSCFG时钟
//GPIO初始化设置
GPIO_InitStructure.GPIO_Pin =GPIO_Pin_4; // PA4 AD7766_CS
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_OUT;//
GPIO_InitStructure.GPIO_OType = GPIO_OType_PP;//推挽输出
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;//50MHz
GPIO_InitStructure.GPIO_PuPd = GPIO_PuPd_UP;//上拉
GPIO_Init(GPIOA, &GPIO_InitStructure);//初始化
//GPIO初始化设置
GPIO_InitStructure.GPIO_Pin =GPIO_Pin_0; // PB0 AD7766_SYNC
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_OUT;//
GPIO_InitStructure.GPIO_OType = GPIO_OType_PP;//推挽输出
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;//50MHz
GPIO_InitStructure.GPIO_PuPd = GPIO_PuPd_UP;//上拉
GPIO_Init(GPIOB, &GPIO_InitStructure);//初始化
//GPIO初始化设置 AD7766_RDY
GPIO_InitStructure.GPIO_Pin =GPIO_Pin_3; //PA3 AD7766_RDY 外部下降沿中断
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_IN;//输入
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;//50MHz
GPIO_InitStructure.GPIO_PuPd = GPIO_PuPd_UP;//上拉
GPIO_Init(GPIOA, &GPIO_InitStructure);//初始化
/*配置RDY为外部中断*/
SYSCFG_EXTILineConfig(EXTI_PortSourceGPIOA, EXTI_PinSource3);//PA3 AD7766_RDY 连接到中断线3 RDY使用外部中断
/* 配置EXTI_Line3 */
EXTI_InitStructure.EXTI_Line = EXTI_Line3;//LINE3
EXTI_InitStructure.EXTI_Mode = EXTI_Mode_Interrupt;//中断事件
EXTI_InitStructure.EXTI_Trigger = EXTI_Trigger_Falling; //下降沿触发
EXTI_InitStructure.EXTI_LineCmd = ENABLE;//使能
EXTI_Init(&EXTI_InitStructure);//配置
NVIC_InitStructure.NVIC_IRQChannel = EXTI3_IRQn;//外部中断
NVIC_InitStructure.NVIC_IRQChannelPreemptionPriority = 0;//抢占优先级0
NVIC_InitStructure.NVIC_IRQChannelSubPriority = 1;//子优先级1
NVIC_InitStructure.NVIC_IRQChannelCmd = ENABLE;//使能外部中断通道
NVIC_Init(&NVIC_InitStructure);//配置
}
//rate=10 表示AD7766采样率为10K MClK=80K
void SetSamplingRate(u8 rate) //开启TIM3_PWM时序 供AD7766_MCLK
{
u16 mclk;
mclk=rate<<3; //rate=10 mclk=80
TIM_Cmd(TIM3, DISABLE); //TIM3 失能
//PWM模式
// 84M/21=4M=0.25us (4000/80)*0.25us=12.5us=80K
TIM3_PWM_Config(4000/mclk-1,21-1); //TIM3初始化配置 且使能
TIM_SetCompare1(TIM3,2000/mclk); //设置占空比50% CCR1= 2000/mclk
// TIM_SetCompare2(TIM3,2000/mclk); //设置占空比50% CCR2= 2000/mclk
}
void AD7766_PowerDown(void) //关断AD7766数据传输
{
AD7766_SYNC=0; //关断引脚 DRDY引脚一直输出高电平
}
void AD7766_WakeUp(void) //开启/复位AD77数据传输
{
AD7766_SYNC=1; //AD7766开启复位
while(AD7766_RDY==0); //等待复位完成 进入外部中断,清零标志位
delay_ms(10);
AD7766_CS=0; //打开片选引脚
delay_ms(10);
}
void AD7766_Init(void)
{
//PA5 SPI1_SCK
//PA6 SPI1_MISO
SPI1_Init(); //SPI初始化 读取AD7766电压值
//PA3 AD7766_RDY 外部下降沿中断 中断优先级 主0子1
//PA4 AD7766_CS 上拉推挽输出
//PB0 AD7766_SYNC 上拉推挽输出
AD7766_GPIOConfig(); //AD7766引脚初始化
//10 表示AD7766采样率为10K MClK=80K
SetSamplingRate(10); //开启TIM3_PWM时序 供AD7766_MCLK
AD7766_PowerDown(); //关断AD7766数据传输
AD7766_WakeUp(); //开启/复位AD77数据传输 cs拉低
}
AD7766.H
#ifndef __AD7766_H
#define __AD7766_H
#include "spi.h"
#include "sys.h"
#include "delay.h"
#include "led.h"
#include "timer.h"
#define AD7766_CS PAout(4) //上拉输出 片选引脚AD7766_CS=0; 0有效
#define AD7766_RDY PAin(3) //外部中断 数据就绪引脚
#define AD7766_SYNC PBout(0) //上拉输出 关断/复位/同步引脚
void AD7766_GPIOConfig(void);
void AD7766_Init(void);
void AD7766_PowerDown(void);
void AD7766_WakeUp(void);
#endif
外部中断.c
在中断函数中启动SPI读取数据,双向全双工模式下,SPI发送3个任意字节数据,同时接收3个字节的目标数据
u32 VoltageBuffer; //压力值
//外部中断 AD7766 DRDY数据输出就绪
//外部中断频率=采样率 10K=100us=0.1ms
void EXTI3_IRQHandler(void) //读取AD7766压力值
{
VoltageBuffer=SPI1_AD7766_Read(); //获取AD7766压力值 赋值压力值 缓存区数组VoltageBuffer1
EXTI_ClearITPendingBit(EXTI_Line3);//清除LINE3上的中断标志位
}
main.c
串口打印采集到的AD7766原始AD值
int main(void)
{
NVIC_PriorityGroupConfig(NVIC_PriorityGroup_2);
delay_init(168);
/*串口1*/
uart1_init(115200); //串口1/UART1
printf("开机运行rn");
LED_Init(); //LED初始化 PD10
AD7766_Init();
printf("初始化完成rn");
while(1)
{
printf("采集AD7766原始值为=%drn",VoltageBuffer);
delay_ms(100);
}
}
四、AD7766采样分析
用逻辑分析仪查看AD7766 SPI通信引脚
通道0不是CS脚,而是DRDY引脚,CS脚在初始化时被设置为零。
本次AD7766采样值为0XFF
五、结果转换
因为此次电路图中AD7766的参考电压为5V,则ΔV=(Vin﹢) - (Vin-)的输入电压范围为 -5V 到 5V。如图可知,单片机从AD7766读取到的值根据输入电压值分贝对应在0X8FFFFF-0XFFFFFF(负值),0X000000~0X7FFFFF(正值)范围内变化。

 举报
举报




