4. 完善porttimer.c文件
modbus工作时需要一个定时器,所以这里配置一个定时器。定时器时基是50us,周期做为参数输入。这里注意我们这里面的inline void vMBPortTimersEnable( )以及inline void vMBPortTimersDisable( )函数需要去掉前面的inline,具体改好的代码如下:
/* ----------------------- Platform includes --------------------------------*/
#include “port.h”
#include “bsp_timer2.h”
/* ----------------------- Modbus includes ----------------------------------*/
#include “mb.h”
#include “mbport.h”
/* ----------------------- static functions ---------------------------------*/
static void prvvTIMERExpiredISR( void );
/* ----------------------- Start implementation -----------------------------*/
BOOL
xMBPortTimersInit( USHORT usTim1Timerout50us )
{
timer2_init(usTim1Timerout50us);
timer2_nvic();
return TRUE;
}
void vMBPortTimersEnable( )
{
/* Enable the timer with the timeout passed to xMBPortTimersInit( ) */
TIM_ClearITPendingBit(TIM2, TIM_IT_Update);
TIM_ITConfig(TIM2, TIM_IT_Update, ENABLE);
TIM_SetCounter(TIM2,0x0000);
TIM_Cmd(TIM2, ENABLE);
}
void vMBPortTimersDisable( )
{
/* Disable any pending timers. */
TIM_ClearITPendingBit(TIM2, TIM_IT_Update);
TIM_ITConfig(TIM2, TIM_IT_Update, DISABLE);
TIM_SetCounter(TIM2,0x0000);
TIM_Cmd(TIM2, DISABLE);
}
/* Create an ISR which is called whenever the timer has expired. This function
* must then call pxMBPortCBTimerExpired( ) to notify the protocol stack that
* the timer has expired.
*/
static void prvvTIMERExpiredISR( void )
{
( void )pxMBPortCBTimerExpired( );
}
void TIM2_IRQHandler(void)
{
if(TIM_GetITStatus(TIM2, TIM_IT_Update) != RESET)
{
prvvTIMERExpiredISR();
TIM_ClearITPendingBit(TIM2, TIM_IT_Update);
}
}
其中 timer2_init(usTim1Timerout50us) 和 timer2_nvic() 是timer2初始化函数,我也同样建立了一个.c和一个.h文件保存,这两个文件在我的工程里面的HARDWARE文件夹下,也可以直接去拷贝,内容如下:
bsp_timer2.c
#include “bsp_timer2.h”
void timer2_init(uint16_t period)
{
TIM_TimeBaseInitTypeDef TIM_TimeBaseStructure;
RCC_APB1PeriphClockCmd(RCC_APB1Periph_TIM2, ENABLE);
TIM_DeInit(TIM2);
TIM_TimeBaseStructure.TIM_Period = period;
TIM_TimeBaseStructure.TIM_Prescaler = (1800 - 1);
TIM_TimeBaseStructure.TIM_ClockDivision = 0;
TIM_TimeBaseStructure.TIM_CounterMode = TIM_CounterMode_Up;
TIM_TimeBaseInit(TIM2, &TIM_TimeBaseStructure);
TIM_Cmd(TIM2, ENABLE);
}
void timer2_nvic(void)
{
NVIC_InitTypeDef NVIC_InitStructure;
NVIC_InitStructure.NVIC_IRQChannel = TIM2_IRQn;
NVIC_InitStructure.NVIC_IRQChannelPreemptionPriority = 0;
NVIC_InitStructure.NVIC_IRQChannelSubPriority = 2;
NVIC_InitStructure.NVIC_IRQChannelCmd = ENABLE;
NVIC_Init(&NVIC_InitStructure);
}
bsp_timer2.h
#ifndef __TIMER2_H
#define __TIMER2_H
#include “stm32f10x.h”
void timer2_init(uint16_t period);
void timer2_nvic(void);
#endif /* __TIMER2_H */
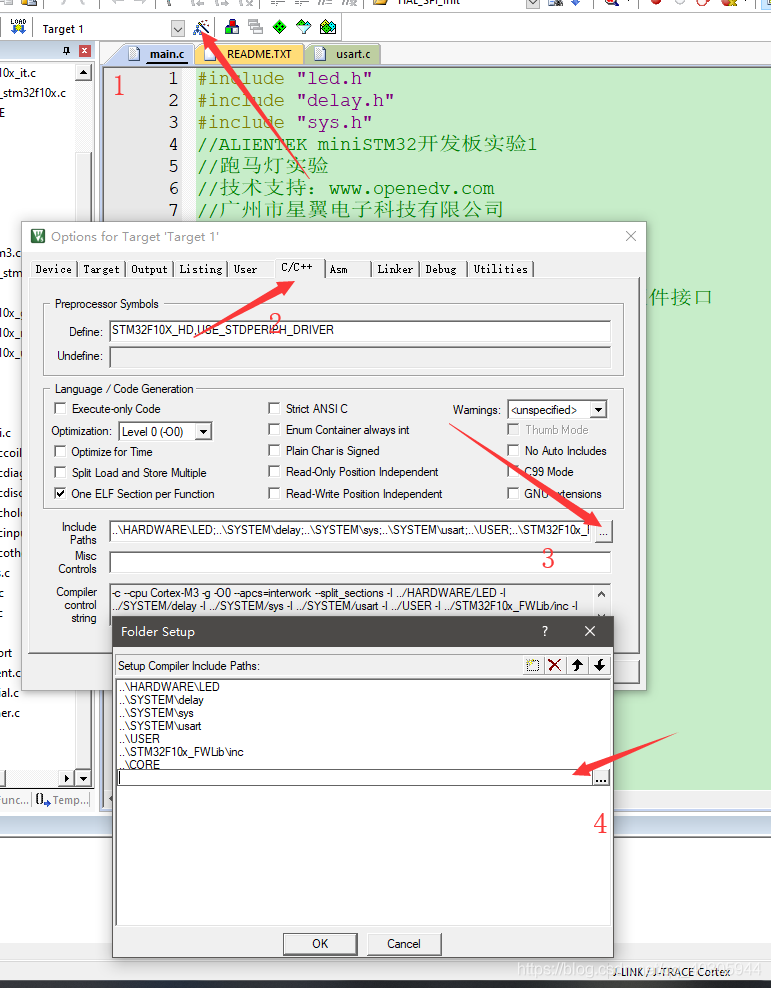
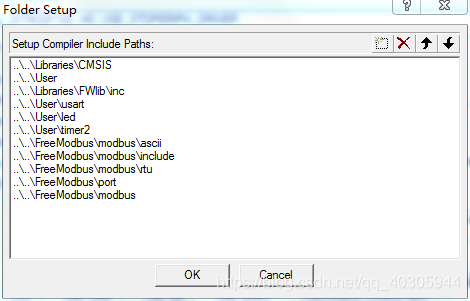
这样,两个文件就补充好了,接下来需要我们将bsp_usart1.h和bsp_timer2.h的文件路径加入我们的工程,如下图:

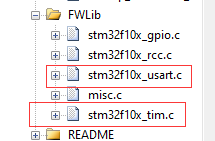
此时编译会提示我们没有加入官方库函数,我们现在导入

我的提示官方标准库里面的一些关于tim函数没找到,代表我们没加入的stm32f10x_tim.c文件,加入就好了,你们的还可能提示关于usart的文件没找到,加入stm32f10x_usart.c就好,这个我就不写教程了,不会的话建议重新学stm32,加入后如图:
接下来在编译,会发现就只报4个错误了,提示4个文件未定义,如下图:

跟我一样的情况就继续往下,不是一样的就检查检查,或者再来一遍。一样的话建议先保存一个副本,防止下面的操作出问题,然后又得重新开始。有副本的话可以继续从这里开始。
5、在main.c文件中定义各个模拟寄存器的地址和大小。
将下面的宏定义放到我们main.c 声明头文件结束之后
/* ----------------------- Defines ------------------------------------------*/
//输入寄存器起始地址
#define REG_INPUT_START 0x0000
//输入寄存器数量
#define REG_INPUT_NREGS 8
//保持寄存器起始地址
#define REG_HOLDING_START 0x0000
//保持寄存器数量
#define REG_HOLDING_NREGS 8
//线圈起始地址
#define REG_COILS_START 0x0000
//线圈数量
#define REG_COILS_SIZE 16
//开关寄存器起始地址
#define REG_DISCRETE_START 0x0000
//开关寄存器数量
#define REG_DISCRETE_SIZE 16
/* Private variables ---------------------------------------------------------*/
//输入寄存器内容
uint16_t usRegInputBuf[REG_INPUT_NREGS] = {0x1000,0x1001,0x1002,0x1003,0x1004,0x1005,0x1006,0x1007};
//输入寄存器起始地址
uint16_t usRegInputStart = REG_INPUT_START;
//保持寄存器内容
uint16_t usRegHoldingBuf[REG_HOLDING_NREGS] = {0x147b,0x3f8e,0x147b,0x400e,0x1eb8,0x4055,0x147b,0x408e};
//保持寄存器起始地址
uint16_t usRegHoldingStart = REG_HOLDING_START;
//线圈状态
uint8_t ucRegCoilsBuf[REG_COILS_SIZE / 8] = {0x01,0x02};
//开关输入状态
uint8_t ucRegDiscreteBuf[REG_DISCRETE_SIZE / 8] = {0x01,0x02};
6.补全输入寄存器操作函数、保持寄存器操作函数、线圈操作函数、离散寄存器函数
在main.c文件里面更改int main()函数对modbus功能进行初始化,设置地址和波特率。这部分内容可以参考官方资料里的例程,也可以直接复制别人写好的。这是我写好的代码:
/**
* @brief 主函数
* @param 无
* @retval 无
*/
int main(void)
{
//初始化 RTU模式 参数二:不用管,参数3:从机地址为1 参数4:9600 参数5:无效验
eMBInit(MB_RTU, 0x01, 0x01, 9600, MB_PAR_NONE);
eMBEnable();
for(;;)
{
(void)eMBPoll();
}
}
/*********************************************END OF FILE**********************/
/****************************************************************************
* 名 称:eMBRegInputCB
* 功 能:读取输入寄存器,对应功能码是 04 eMBFuncReadInputRegister
* 入口参数:pucRegBuffer: 数据缓存区,用于响应主机
* usAddress: 寄存器地址
* usNRegs: 要读取的寄存器个数
* 出口参数:
* 注 意:上位机发来的 帧格式是: SlaveAddr(1 Byte)+FuncCode(1 Byte)
* +StartAddrHiByte(1 Byte)+StartAddrLoByte(1 Byte)
* +LenAddrHiByte(1 Byte)+LenAddrLoByte(1 Byte)+
* +CRCAddrHiByte(1 Byte)+CRCAddrLoByte(1 Byte)
* 3 区
****************************************************************************/
eMBErrorCode
eMBRegInputCB( UCHAR * pucRegBuffer, USHORT usAddress, USHORT usNRegs )
{
eMBErrorCode eStatus = MB_ENOERR;
int iRegIndex;
if( ( usAddress 》= REG_INPUT_START )
&& ( usAddress + usNRegs 《= REG_INPUT_START + REG_INPUT_NREGS ) )
{
iRegIndex = ( int )( usAddress - usRegInputStart );
while( usNRegs 》 0 )
{
*pucRegBuffer++ = ( UCHAR )( usRegInputBuf[iRegIndex] 》》 8 );
*pucRegBuffer++ = ( UCHAR )( usRegInputBuf[iRegIndex] & 0xFF );
iRegIndex++;
usNRegs--;
}
}
else
{
eStatus = MB_ENOREG;
}
return eStatus;
}
/****************************************************************************
* 名 称:eMBRegHoldingCB
* 功 能:对应功能码有:06 写保持寄存器 eMBFuncWriteHoldingRegister
* 16 写多个保持寄存器 eMBFuncWriteMultipleHoldingRegister
* 03 读保持寄存器 eMBFuncReadHoldingRegister
* 23 读写多个保持寄存器 eMBFuncReadWriteMultipleHoldingRegister
* 入口参数:pucRegBuffer: 数据缓存区,用于响应主机
* usAddress: 寄存器地址
* usNRegs: 要读写的寄存器个数
* eMode: 功能码
* 出口参数:
* 注 意:4 区
****************************************************************************/
eMBErrorCode
eMBRegHoldingCB( UCHAR * pucRegBuffer, USHORT usAddress, USHORT usNRegs, eMBRegisterMode eMode )
{
eMBErrorCode eStatus = MB_ENOERR;
int iRegIndex;
if((usAddress 》= REG_HOLDING_START)&&
((usAddress+usNRegs) 《= (REG_HOLDING_START + REG_HOLDING_NREGS)))
{
iRegIndex = (int)(usAddress - usRegHoldingStart);
switch(eMode)
{
case MB_REG_READ://读 MB_REG_READ = 0
while(usNRegs 》 0)
{
*pucRegBuffer++ = (u8)(usRegHoldingBuf[iRegIndex] 》》 8);
*pucRegBuffer++ = (u8)(usRegHoldingBuf[iRegIndex] & 0xFF);
iRegIndex++;
usNRegs--;
}
break;
case MB_REG_WRITE://写 MB_REG_WRITE = 0
while(usNRegs 》 0)
{
usRegHoldingBuf[iRegIndex] = *pucRegBuffer++ 《《 8;
usRegHoldingBuf[iRegIndex] |= *pucRegBuffer++;
iRegIndex++;
usNRegs--;
}
}
}
else//错误
{
eStatus = MB_ENOREG;
}
return eStatus;
}
extern void xMBUtilSetBits( UCHAR * ucByteBuf, USHORT usBitOffset, UCHAR ucNBits,
UCHAR ucValue );
extern UCHAR xMBUtilGetBits( UCHAR * ucByteBuf, USHORT usBitOffset, UCHAR ucNBits );
/****************************************************************************
* 名 称:eMBRegCoilsCB
* 功 能:对应功能码有:01 读线圈 eMBFuncReadCoils
* 05 写线圈 eMBFuncWriteCoil
* 15 写多个线圈 eMBFuncWriteMultipleCoils
* 入口参数:pucRegBuffer: 数据缓存区,用于响应主机
* usAddress: 线圈地址
* usNCoils: 要读写的线圈个数
* eMode: 功能码
* 出口参数:
* 注 意:如继电器
* 0 区
****************************************************************************/
eMBErrorCode
eMBRegCoilsCB( UCHAR * pucRegBuffer, USHORT usAddress, USHORT usNCoils,
eMBRegisterMode eMode )
{
//错误状态
eMBErrorCode eStatus = MB_ENOERR;
//寄存器个数
int16_t iNCoils = ( int16_t )usNCoils;
//寄存器偏移量
int16_t usBitOffset;
//检查寄存器是否在指定范围内
if( ( (int16_t)usAddress 》= REG_COILS_START ) &&
( usAddress + usNCoils 《= REG_COILS_START + REG_COILS_SIZE ) )
{
//计算寄存器偏移量
usBitOffset = ( int16_t )( usAddress - REG_COILS_START );
switch ( eMode )
{
//读操作
case MB_REG_READ:
while( iNCoils 》 0 )
{
*pucRegBuffer++ = xMBUtilGetBits( ucRegCoilsBuf, usBitOffset,
( uint8_t )( iNCoils 》 8 ? 8 : iNCoils ) );
iNCoils -= 8;
usBitOffset += 8;
}
break;
//写操作
case MB_REG_WRITE:
while( iNCoils 》 0 )
{
xMBUtilSetBits( ucRegCoilsBuf, usBitOffset,
( uint8_t )( iNCoils 》 8 ? 8 : iNCoils ),
*pucRegBuffer++ );
iNCoils -= 8;
}
break;
}
}
else
{
eStatus = MB_ENOREG;
}
return eStatus;
}
/****************************************************************************
* 名 称:eMBRegDiscreteCB
* 功 能:读取离散寄存器,对应功能码有:02 读离散寄存器 eMBFuncReadDiscreteInputs
* 入口参数:pucRegBuffer: 数据缓存区,用于响应主机
* usAddress: 寄存器地址
* usNDiscrete: 要读取的寄存器个数
* 出口参数:
* 注 意:1 区
****************************************************************************/
eMBErrorCode
eMBRegDiscreteCB( UCHAR * pucRegBuffer, USHORT usAddress, USHORT usNDiscrete )
{
//错误状态
eMBErrorCode eStatus = MB_ENOERR;
//操作寄存器个数
int16_t iNDiscrete = ( int16_t )usNDiscrete;
//偏移量
uint16_t usBitOffset;
//判断寄存器时候再制定范围内
if( ( (int16_t)usAddress 》= REG_DISCRETE_START ) &&
( usAddress + usNDiscrete 《= REG_DISCRETE_START + REG_DISCRETE_SIZE ) )
{
//获得偏移量
usBitOffset = ( uint16_t )( usAddress - REG_DISCRETE_START );
while( iNDiscrete 》 0 )
{
*pucRegBuffer++ = xMBUtilGetBits( ucRegDiscreteBuf, usBitOffset,
( uint8_t)( iNDiscrete 》 8 ? 8 : iNDiscrete ) );
iNDiscrete -= 8;
usBitOffset += 8;
}
}
else
{
eStatus = MB_ENOREG;
}
return eStatus;
}
4. 完善porttimer.c文件
modbus工作时需要一个定时器,所以这里配置一个定时器。定时器时基是50us,周期做为参数输入。这里注意我们这里面的inline void vMBPortTimersEnable( )以及inline void vMBPortTimersDisable( )函数需要去掉前面的inline,具体改好的代码如下:
/* ----------------------- Platform includes --------------------------------*/
#include “port.h”
#include “bsp_timer2.h”
/* ----------------------- Modbus includes ----------------------------------*/
#include “mb.h”
#include “mbport.h”
/* ----------------------- static functions ---------------------------------*/
static void prvvTIMERExpiredISR( void );
/* ----------------------- Start implementation -----------------------------*/
BOOL
xMBPortTimersInit( USHORT usTim1Timerout50us )
{
timer2_init(usTim1Timerout50us);
timer2_nvic();
return TRUE;
}
void vMBPortTimersEnable( )
{
/* Enable the timer with the timeout passed to xMBPortTimersInit( ) */
TIM_ClearITPendingBit(TIM2, TIM_IT_Update);
TIM_ITConfig(TIM2, TIM_IT_Update, ENABLE);
TIM_SetCounter(TIM2,0x0000);
TIM_Cmd(TIM2, ENABLE);
}
void vMBPortTimersDisable( )
{
/* Disable any pending timers. */
TIM_ClearITPendingBit(TIM2, TIM_IT_Update);
TIM_ITConfig(TIM2, TIM_IT_Update, DISABLE);
TIM_SetCounter(TIM2,0x0000);
TIM_Cmd(TIM2, DISABLE);
}
/* Create an ISR which is called whenever the timer has expired. This function
* must then call pxMBPortCBTimerExpired( ) to notify the protocol stack that
* the timer has expired.
*/
static void prvvTIMERExpiredISR( void )
{
( void )pxMBPortCBTimerExpired( );
}
void TIM2_IRQHandler(void)
{
if(TIM_GetITStatus(TIM2, TIM_IT_Update) != RESET)
{
prvvTIMERExpiredISR();
TIM_ClearITPendingBit(TIM2, TIM_IT_Update);
}
}
其中 timer2_init(usTim1Timerout50us) 和 timer2_nvic() 是timer2初始化函数,我也同样建立了一个.c和一个.h文件保存,这两个文件在我的工程里面的HARDWARE文件夹下,也可以直接去拷贝,内容如下:
bsp_timer2.c
#include “bsp_timer2.h”
void timer2_init(uint16_t period)
{
TIM_TimeBaseInitTypeDef TIM_TimeBaseStructure;
RCC_APB1PeriphClockCmd(RCC_APB1Periph_TIM2, ENABLE);
TIM_DeInit(TIM2);
TIM_TimeBaseStructure.TIM_Period = period;
TIM_TimeBaseStructure.TIM_Prescaler = (1800 - 1);
TIM_TimeBaseStructure.TIM_ClockDivision = 0;
TIM_TimeBaseStructure.TIM_CounterMode = TIM_CounterMode_Up;
TIM_TimeBaseInit(TIM2, &TIM_TimeBaseStructure);
TIM_Cmd(TIM2, ENABLE);
}
void timer2_nvic(void)
{
NVIC_InitTypeDef NVIC_InitStructure;
NVIC_InitStructure.NVIC_IRQChannel = TIM2_IRQn;
NVIC_InitStructure.NVIC_IRQChannelPreemptionPriority = 0;
NVIC_InitStructure.NVIC_IRQChannelSubPriority = 2;
NVIC_InitStructure.NVIC_IRQChannelCmd = ENABLE;
NVIC_Init(&NVIC_InitStructure);
}
bsp_timer2.h
#ifndef __TIMER2_H
#define __TIMER2_H
#include “stm32f10x.h”
void timer2_init(uint16_t period);
void timer2_nvic(void);
#endif /* __TIMER2_H */
这样,两个文件就补充好了,接下来需要我们将bsp_usart1.h和bsp_timer2.h的文件路径加入我们的工程,如下图:
此时编译会提示我们没有加入官方库函数,我们现在导入
我的提示官方标准库里面的一些关于tim函数没找到,代表我们没加入的stm32f10x_tim.c文件,加入就好了,你们的还可能提示关于usart的文件没找到,加入stm32f10x_usart.c就好,这个我就不写教程了,不会的话建议重新学stm32,加入后如图:
接下来在编译,会发现就只报4个错误了,提示4个文件未定义,如下图:
跟我一样的情况就继续往下,不是一样的就检查检查,或者再来一遍。一样的话建议先保存一个副本,防止下面的操作出问题,然后又得重新开始。有副本的话可以继续从这里开始。
5、在main.c文件中定义各个模拟寄存器的地址和大小。
将下面的宏定义放到我们main.c 声明头文件结束之后
/* ----------------------- Defines ------------------------------------------*/
//输入寄存器起始地址
#define REG_INPUT_START 0x0000
//输入寄存器数量
#define REG_INPUT_NREGS 8
//保持寄存器起始地址
#define REG_HOLDING_START 0x0000
//保持寄存器数量
#define REG_HOLDING_NREGS 8
//线圈起始地址
#define REG_COILS_START 0x0000
//线圈数量
#define REG_COILS_SIZE 16
//开关寄存器起始地址
#define REG_DISCRETE_START 0x0000
//开关寄存器数量
#define REG_DISCRETE_SIZE 16
/* Private variables ---------------------------------------------------------*/
//输入寄存器内容
uint16_t usRegInputBuf[REG_INPUT_NREGS] = {0x1000,0x1001,0x1002,0x1003,0x1004,0x1005,0x1006,0x1007};
//输入寄存器起始地址
uint16_t usRegInputStart = REG_INPUT_START;
//保持寄存器内容
uint16_t usRegHoldingBuf[REG_HOLDING_NREGS] = {0x147b,0x3f8e,0x147b,0x400e,0x1eb8,0x4055,0x147b,0x408e};
//保持寄存器起始地址
uint16_t usRegHoldingStart = REG_HOLDING_START;
//线圈状态
uint8_t ucRegCoilsBuf[REG_COILS_SIZE / 8] = {0x01,0x02};
//开关输入状态
uint8_t ucRegDiscreteBuf[REG_DISCRETE_SIZE / 8] = {0x01,0x02};
6.补全输入寄存器操作函数、保持寄存器操作函数、线圈操作函数、离散寄存器函数
在main.c文件里面更改int main()函数对modbus功能进行初始化,设置地址和波特率。这部分内容可以参考官方资料里的例程,也可以直接复制别人写好的。这是我写好的代码:
/**
* @brief 主函数
* @param 无
* @retval 无
*/
int main(void)
{
//初始化 RTU模式 参数二:不用管,参数3:从机地址为1 参数4:9600 参数5:无效验
eMBInit(MB_RTU, 0x01, 0x01, 9600, MB_PAR_NONE);
eMBEnable();
for(;;)
{
(void)eMBPoll();
}
}
/*********************************************END OF FILE**********************/
/****************************************************************************
* 名 称:eMBRegInputCB
* 功 能:读取输入寄存器,对应功能码是 04 eMBFuncReadInputRegister
* 入口参数:pucRegBuffer: 数据缓存区,用于响应主机
* usAddress: 寄存器地址
* usNRegs: 要读取的寄存器个数
* 出口参数:
* 注 意:上位机发来的 帧格式是: SlaveAddr(1 Byte)+FuncCode(1 Byte)
* +StartAddrHiByte(1 Byte)+StartAddrLoByte(1 Byte)
* +LenAddrHiByte(1 Byte)+LenAddrLoByte(1 Byte)+
* +CRCAddrHiByte(1 Byte)+CRCAddrLoByte(1 Byte)
* 3 区
****************************************************************************/
eMBErrorCode
eMBRegInputCB( UCHAR * pucRegBuffer, USHORT usAddress, USHORT usNRegs )
{
eMBErrorCode eStatus = MB_ENOERR;
int iRegIndex;
if( ( usAddress 》= REG_INPUT_START )
&& ( usAddress + usNRegs 《= REG_INPUT_START + REG_INPUT_NREGS ) )
{
iRegIndex = ( int )( usAddress - usRegInputStart );
while( usNRegs 》 0 )
{
*pucRegBuffer++ = ( UCHAR )( usRegInputBuf[iRegIndex] 》》 8 );
*pucRegBuffer++ = ( UCHAR )( usRegInputBuf[iRegIndex] & 0xFF );
iRegIndex++;
usNRegs--;
}
}
else
{
eStatus = MB_ENOREG;
}
return eStatus;
}
/****************************************************************************
* 名 称:eMBRegHoldingCB
* 功 能:对应功能码有:06 写保持寄存器 eMBFuncWriteHoldingRegister
* 16 写多个保持寄存器 eMBFuncWriteMultipleHoldingRegister
* 03 读保持寄存器 eMBFuncReadHoldingRegister
* 23 读写多个保持寄存器 eMBFuncReadWriteMultipleHoldingRegister
* 入口参数:pucRegBuffer: 数据缓存区,用于响应主机
* usAddress: 寄存器地址
* usNRegs: 要读写的寄存器个数
* eMode: 功能码
* 出口参数:
* 注 意:4 区
****************************************************************************/
eMBErrorCode
eMBRegHoldingCB( UCHAR * pucRegBuffer, USHORT usAddress, USHORT usNRegs, eMBRegisterMode eMode )
{
eMBErrorCode eStatus = MB_ENOERR;
int iRegIndex;
if((usAddress 》= REG_HOLDING_START)&&
((usAddress+usNRegs) 《= (REG_HOLDING_START + REG_HOLDING_NREGS)))
{
iRegIndex = (int)(usAddress - usRegHoldingStart);
switch(eMode)
{
case MB_REG_READ://读 MB_REG_READ = 0
while(usNRegs 》 0)
{
*pucRegBuffer++ = (u8)(usRegHoldingBuf[iRegIndex] 》》 8);
*pucRegBuffer++ = (u8)(usRegHoldingBuf[iRegIndex] & 0xFF);
iRegIndex++;
usNRegs--;
}
break;
case MB_REG_WRITE://写 MB_REG_WRITE = 0
while(usNRegs 》 0)
{
usRegHoldingBuf[iRegIndex] = *pucRegBuffer++ 《《 8;
usRegHoldingBuf[iRegIndex] |= *pucRegBuffer++;
iRegIndex++;
usNRegs--;
}
}
}
else//错误
{
eStatus = MB_ENOREG;
}
return eStatus;
}
extern void xMBUtilSetBits( UCHAR * ucByteBuf, USHORT usBitOffset, UCHAR ucNBits,
UCHAR ucValue );
extern UCHAR xMBUtilGetBits( UCHAR * ucByteBuf, USHORT usBitOffset, UCHAR ucNBits );
/****************************************************************************
* 名 称:eMBRegCoilsCB
* 功 能:对应功能码有:01 读线圈 eMBFuncReadCoils
* 05 写线圈 eMBFuncWriteCoil
* 15 写多个线圈 eMBFuncWriteMultipleCoils
* 入口参数:pucRegBuffer: 数据缓存区,用于响应主机
* usAddress: 线圈地址
* usNCoils: 要读写的线圈个数
* eMode: 功能码
* 出口参数:
* 注 意:如继电器
* 0 区
****************************************************************************/
eMBErrorCode
eMBRegCoilsCB( UCHAR * pucRegBuffer, USHORT usAddress, USHORT usNCoils,
eMBRegisterMode eMode )
{
//错误状态
eMBErrorCode eStatus = MB_ENOERR;
//寄存器个数
int16_t iNCoils = ( int16_t )usNCoils;
//寄存器偏移量
int16_t usBitOffset;
//检查寄存器是否在指定范围内
if( ( (int16_t)usAddress 》= REG_COILS_START ) &&
( usAddress + usNCoils 《= REG_COILS_START + REG_COILS_SIZE ) )
{
//计算寄存器偏移量
usBitOffset = ( int16_t )( usAddress - REG_COILS_START );
switch ( eMode )
{
//读操作
case MB_REG_READ:
while( iNCoils 》 0 )
{
*pucRegBuffer++ = xMBUtilGetBits( ucRegCoilsBuf, usBitOffset,
( uint8_t )( iNCoils 》 8 ? 8 : iNCoils ) );
iNCoils -= 8;
usBitOffset += 8;
}
break;
//写操作
case MB_REG_WRITE:
while( iNCoils 》 0 )
{
xMBUtilSetBits( ucRegCoilsBuf, usBitOffset,
( uint8_t )( iNCoils 》 8 ? 8 : iNCoils ),
*pucRegBuffer++ );
iNCoils -= 8;
}
break;
}
}
else
{
eStatus = MB_ENOREG;
}
return eStatus;
}
/****************************************************************************
* 名 称:eMBRegDiscreteCB
* 功 能:读取离散寄存器,对应功能码有:02 读离散寄存器 eMBFuncReadDiscreteInputs
* 入口参数:pucRegBuffer: 数据缓存区,用于响应主机
* usAddress: 寄存器地址
* usNDiscrete: 要读取的寄存器个数
* 出口参数:
* 注 意:1 区
****************************************************************************/
eMBErrorCode
eMBRegDiscreteCB( UCHAR * pucRegBuffer, USHORT usAddress, USHORT usNDiscrete )
{
//错误状态
eMBErrorCode eStatus = MB_ENOERR;
//操作寄存器个数
int16_t iNDiscrete = ( int16_t )usNDiscrete;
//偏移量
uint16_t usBitOffset;
//判断寄存器时候再制定范围内
if( ( (int16_t)usAddress 》= REG_DISCRETE_START ) &&
( usAddress + usNDiscrete 《= REG_DISCRETE_START + REG_DISCRETE_SIZE ) )
{
//获得偏移量
usBitOffset = ( uint16_t )( usAddress - REG_DISCRETE_START );
while( iNDiscrete 》 0 )
{
*pucRegBuffer++ = xMBUtilGetBits( ucRegDiscreteBuf, usBitOffset,
( uint8_t)( iNDiscrete 》 8 ? 8 : iNDiscrete ) );
iNDiscrete -= 8;
usBitOffset += 8;
}
}
else
{
eStatus = MB_ENOREG;
}
return eStatus;
}

 举报
举报