STM32
登录
直播中
吴湛
11年用户
807经验值
擅长:可编程逻辑
私信
关注
[问答]
怎样去设计一种基于数字麦克风的声源定位装置系统呢
开启该帖子的消息推送
数字麦克风
声源定位
装置
声源定位装置系统是由哪些部分组成的?
怎样去设计一种基于数字麦克风的声源定位装置系统呢?
回帖
(1)
杜永强
2021-11-10 14:25:08
一、设计概述 /Design Introduction
1.1 设计目的
基于麦克风阵列模拟人耳进行三维空间的声源定位,有着广泛应用前景,可应用于大型机械产品的故障检测以及新生婴儿先天性心脏病检测筛查等领域,这些应用要求定位精度高,空间定位分辨能力强,而声源的定位精度与声音信号的频率、传感器阵列的大小及声音信号的信噪比等因素密切相关。传统的时间差或相位差定位算法,随着麦克风阵列的增加,计算量急剧增加,为了提高定位精度,本作品在GCC_PHAT 算法基础上,利用 FPGA 的处理实时性,进行数字解码,滤波,解算处理,多阵列可以并行运算, 大幅提高了声音的空间定位精度。
1.2 应用领域
本作品应用前景广泛。例如,在交通领域,可以用于鸣笛抓拍中。在麦克风阵列研究领域,可以用于波束形成算法的验证;同时,也可以将其作为一个录音设备,配合 Audacity 软件,实现一些声音处理功能,具有很好的实用价值。
1.3 适用范围
本作品适用于需要近场声源定位以及波束形成的场合,在此类场合中,作品可以完全发挥优势,具有较高的速度和精度。
二、系统组成及功能说明 /System Construction & Function Description
2.1 系统介绍
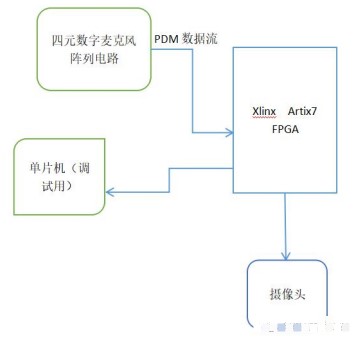
本系统由数字麦克风阵列模块、FPGA 处理器模块、摄像模块共同组成。Xlinx Artix7 FPGA 作为核心,将数字麦克风模块产生的 PDM 码转化为 PCM 码,然后使用 GCC_PHAT 算法对数据进行处理,得到时延值由传给摄像头,摄像头再结合阵列中麦克风的几何关系,将具体的声源位置计算出来,然后将其映射在摄像头所拍的图像上,同时,为了更好地调试,我们麦克风阵列上集成了单片机芯片作为通信接口。
2.2 各模块介绍
2.2.1.数字麦克风阵列模块
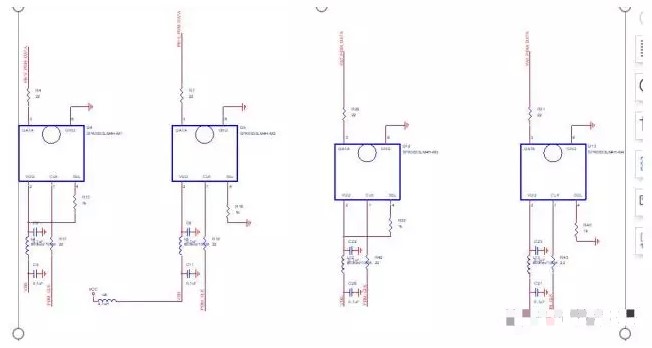
采用性能优良的的数字麦克风 SPK0833LM4H,性能参数:100Hz ~ 10kHz 数字,PDM Microphone MEMS(硅) 1.6V ~ 3.6V 全向 (-26dB ±3dB @ 94dB SPL) 焊盘。两个数字麦 克风共用一个数据线(分别占用左右声道),然后通过两路 I2S 送给 FPGA。数字麦克风实物 图和阵列电路原理图如下图所示
2.2.2. FPGA 处理器模块
处理器主要采用 basys3 开发板,其采用 Xilinx XC7A35T1CPG236C 芯片,含有 5200 个逻辑 Slices,每个包含 4 个 6 输入 LUT 和 8 个触发器,内部时钟频率达 450MHz,片上 4 自带模数转换器,含 1800Kbits 的 Block RAM 和 90 个 DSP48E 单元,有 5 个时钟管理单元。包含多个外设,资源丰富。
FPGA 通过板载的 Pmod 接口与数字麦克风阵列板连接。
2.2.3. 摄像模块
OpenMV 是一个开源,低成本,功能强大的机器视觉模块。以 STM32F427CPU 为核心,集成了 OV7725 摄像头芯片,在小巧的硬件模块上,用 C 语言高效地实现了核心机 器视觉算法,提供 Python 编程接口。
完成情况及性能参数 /Final Design & Performance Parameters
三、功能实现
本系统由数字麦克风阵列电路、FPGA 核心处理模块、摄像头模块。预计实现功能:
(1)四通道同步录音功能;
(2)声源定位,可以定位出摄像头所拍摄到的画面中发声体 6 的位置并在画面中将其标出。
目前,两个功能均已实现,各模块运作稳定,模块间按功能连接。
3.1 数字麦克风阵列电路
此电路能够正常的接受来自 FPGA 的时钟信号并产生对应的 PDM 信号。
3.2 FPGA 核心处理模块
此模块可以准确地去除 PDM 信号中的直流分量并将其转化为 PCM 音频数据流,通过 USB 音频传输协议,可以将其传输到 PC 机上,结合 Audacity 软件,来实现高品质录音和对声音进行分析。同时,FPGA 也成功地实现了 GCC-PHAT 定位算法,定位精度高,效果好。
3.3 摄像头模块
此模块图像可以准确获取清晰的获取图像,实现照片、视频等的拍摄,成像稳定,质量高,且通过 wifi 无线图传扩展板,可以通过 WiFi 来获取它所拍摄到的画面。
四、总结 /Conclusions
4.1 主要创新点
(1)使用了数字麦克风,数字麦克风的最大优点是抗干扰能力强,无需像传统传声器那样内置高频滤波电容、滤波器电路。数字麦克风因其固有的特点,不会受到那些来自电脑、 网络、射频即磁场信号源的干扰、影响。
(2)使用了麦克风阵列来收集声音信号,相比于单麦克风,具有无可比拟的优势。
(3)在高速,并行的 FPGA 中实现了 GCC-PHAT 算法,波束形成算法,计算速度快,计算结果准确,定位精度好。
(4)作品体积小,容易安装,在各场合具有很强的实用性。
4.2 可扩展之处
(1)可以通过 FPGA 外接 SD 卡模块,将转化来的 PCM 音频数据流存在 SD 卡中,可以与拍到的图片相对应,便于后期回放与验证。
(2)增加麦克风数量,改变阵列结构,可以近一步地提高声源定位的速度和精度。
一、设计概述 /Design Introduction
1.1 设计目的
基于麦克风阵列模拟人耳进行三维空间的声源定位,有着广泛应用前景,可应用于大型机械产品的故障检测以及新生婴儿先天性心脏病检测筛查等领域,这些应用要求定位精度高,空间定位分辨能力强,而声源的定位精度与声音信号的频率、传感器阵列的大小及声音信号的信噪比等因素密切相关。传统的时间差或相位差定位算法,随着麦克风阵列的增加,计算量急剧增加,为了提高定位精度,本作品在GCC_PHAT 算法基础上,利用 FPGA 的处理实时性,进行数字解码,滤波,解算处理,多阵列可以并行运算, 大幅提高了声音的空间定位精度。
1.2 应用领域
本作品应用前景广泛。例如,在交通领域,可以用于鸣笛抓拍中。在麦克风阵列研究领域,可以用于波束形成算法的验证;同时,也可以将其作为一个录音设备,配合 Audacity 软件,实现一些声音处理功能,具有很好的实用价值。
1.3 适用范围
本作品适用于需要近场声源定位以及波束形成的场合,在此类场合中,作品可以完全发挥优势,具有较高的速度和精度。
二、系统组成及功能说明 /System Construction & Function Description
2.1 系统介绍
本系统由数字麦克风阵列模块、FPGA 处理器模块、摄像模块共同组成。Xlinx Artix7 FPGA 作为核心,将数字麦克风模块产生的 PDM 码转化为 PCM 码,然后使用 GCC_PHAT 算法对数据进行处理,得到时延值由传给摄像头,摄像头再结合阵列中麦克风的几何关系,将具体的声源位置计算出来,然后将其映射在摄像头所拍的图像上,同时,为了更好地调试,我们麦克风阵列上集成了单片机芯片作为通信接口。
2.2 各模块介绍
2.2.1.数字麦克风阵列模块
采用性能优良的的数字麦克风 SPK0833LM4H,性能参数:100Hz ~ 10kHz 数字,PDM Microphone MEMS(硅) 1.6V ~ 3.6V 全向 (-26dB ±3dB @ 94dB SPL) 焊盘。两个数字麦 克风共用一个数据线(分别占用左右声道),然后通过两路 I2S 送给 FPGA。数字麦克风实物 图和阵列电路原理图如下图所示
2.2.2. FPGA 处理器模块
处理器主要采用 basys3 开发板,其采用 Xilinx XC7A35T1CPG236C 芯片,含有 5200 个逻辑 Slices,每个包含 4 个 6 输入 LUT 和 8 个触发器,内部时钟频率达 450MHz,片上 4 自带模数转换器,含 1800Kbits 的 Block RAM 和 90 个 DSP48E 单元,有 5 个时钟管理单元。包含多个外设,资源丰富。
FPGA 通过板载的 Pmod 接口与数字麦克风阵列板连接。
2.2.3. 摄像模块
OpenMV 是一个开源,低成本,功能强大的机器视觉模块。以 STM32F427CPU 为核心,集成了 OV7725 摄像头芯片,在小巧的硬件模块上,用 C 语言高效地实现了核心机 器视觉算法,提供 Python 编程接口。
完成情况及性能参数 /Final Design & Performance Parameters
三、功能实现
本系统由数字麦克风阵列电路、FPGA 核心处理模块、摄像头模块。预计实现功能:
(1)四通道同步录音功能;
(2)声源定位,可以定位出摄像头所拍摄到的画面中发声体 6 的位置并在画面中将其标出。
目前,两个功能均已实现,各模块运作稳定,模块间按功能连接。
3.1 数字麦克风阵列电路
此电路能够正常的接受来自 FPGA 的时钟信号并产生对应的 PDM 信号。
3.2 FPGA 核心处理模块
此模块可以准确地去除 PDM 信号中的直流分量并将其转化为 PCM 音频数据流,通过 USB 音频传输协议,可以将其传输到 PC 机上,结合 Audacity 软件,来实现高品质录音和对声音进行分析。同时,FPGA 也成功地实现了 GCC-PHAT 定位算法,定位精度高,效果好。
3.3 摄像头模块
此模块图像可以准确获取清晰的获取图像,实现照片、视频等的拍摄,成像稳定,质量高,且通过 wifi 无线图传扩展板,可以通过 WiFi 来获取它所拍摄到的画面。
四、总结 /Conclusions
4.1 主要创新点
(1)使用了数字麦克风,数字麦克风的最大优点是抗干扰能力强,无需像传统传声器那样内置高频滤波电容、滤波器电路。数字麦克风因其固有的特点,不会受到那些来自电脑、 网络、射频即磁场信号源的干扰、影响。
(2)使用了麦克风阵列来收集声音信号,相比于单麦克风,具有无可比拟的优势。
(3)在高速,并行的 FPGA 中实现了 GCC-PHAT 算法,波束形成算法,计算速度快,计算结果准确,定位精度好。
(4)作品体积小,容易安装,在各场合具有很强的实用性。
4.2 可扩展之处
(1)可以通过 FPGA 外接 SD 卡模块,将转化来的 PCM 音频数据流存在 SD 卡中,可以与拍到的图片相对应,便于后期回放与验证。
(2)增加麦克风数量,改变阵列结构,可以近一步地提高声源定位的速度和精度。
举报
更多回帖
rotate(-90deg);
回复
相关问答
数字麦克风
声源定位
装置
如何
去
实现
一种
基于
麦克风
阵列的
声源
定位
装置
系统
设计
2021-11-11
2716
基于双
麦克风声源
定位
的视频跟踪
系统
该怎么设计?
2019-09-25
2464
怎样
去
设计
一种
基于esp8266+树莓派+u***
麦克风
的智能音箱
呢
2022-02-24
1835
麦克风
灵敏度探讨
2019-07-23
3743
请问如何理解
麦克风
的灵敏度规格?
2021-03-18
3490
模拟和
数字
MEMS
麦克风
有什么不同?
2019-08-20
6533
怎样
去
设计
一种
基于PCM1864的圆形
麦克风
板电路?
2021-07-02
1472
如何根据具体应用选择灵敏度最佳的
麦克风
?
2021-06-02
1774
基于stm32的
声源
定位
2016-04-12
13046
MEMS
麦克风
的需求分析
2021-01-25
3448
发帖
登录/注册
20万+
工程师都在用,
免费
PCB检查工具
无需安装、支持浏览器和手机在线查看、实时共享
查看
点击登录
登录更多精彩功能!
首页
论坛版块
小组
免费开发板试用
ebook
直播
搜索
登录
×
20
完善资料,
赚取积分


 举报
举报



