2、介绍一下硬件部分?
(1)、电源模块
怎么去选择整个系统的电源方案呢?
1、进行需求分析:考虑整个系统需要用到哪些电源,有什么要求,比如智能车中我们一般使用电池供电(7.4v);而我们的需要给单片机最小系统供电和运放供电、传感器模块供电、电机、舵机等供电,他们的工作电压都不同,而且对于电磁智能车来说ADC基准电压是非常重要的,要求尽可能的减小文波,因此需求分析是非常重要的。
2、电源参数的设计,
如: 电源输入参数:输入电流/电压;输入电压的波动范围;输入类型等参数。
与之对应的电源输出参数:输出电流/电压;输出电源的质量;输出的类型,是否需要隔离等参数。
3、进行方案的选型与设计:
是使用开关稳压还是使用线性稳压?设计的时候也要考虑成本和PCB面积的大小。
a、线性稳压和开关稳压的区别:
①、线性稳压电源-低压差稳压器(LDO):
1、LDO的结构
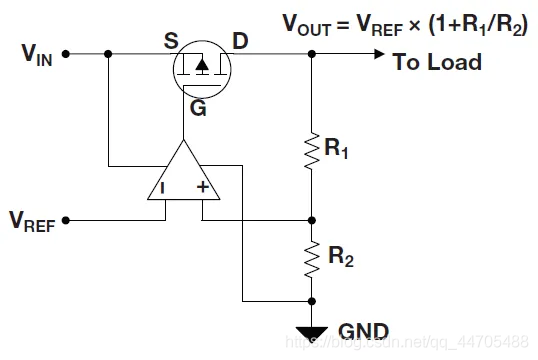
简单的LDO是由一个PMOS、一个误差放大器和两个分压电阻组成的,R1、R2组成了一个分压网络,接入误差放大器的正端,与负端的参考电压VREF一起调节PMOS的RDS。VIN 经过 RDS上产生压降,获得 VOUT。在 PMOS电阻 RDS上产生的压降,也就是 VIN与 VOUT之间的压差。可见,输出电流 IOUT 越大,在 RDS 产生的压降也越大。当VIN(对应PMOS的S极)下降时,误差放大器的输出(对应PMOS的G极)也会降低以获得更低的VGS,来驱动PMOS的获得更低的RDS来保持输出电压的稳定。但误差放大器会在 VIN持续下降时的某一点饱和,无法再使 RDS更低。所以当 VIN非常接近甚至低于 VOUT(NOM)时,LDO 会失去调节电压的能力。
优点:稳定性好,瞬态响应速度快,可靠性高,输出电压精度高,输出纹波电压精度小。
缺点:变换效率较低,尤其是在输入输出电压差较大的情况下。如果输出电流也较大,会有明显的发热发烫现象,甚至可能烧坏稳压器。
②、开关稳压电源:
开关稳压电源里面最常用的就是BUCK(降压斩波)电路和BOSST(升压斩波)电路;学电子的有门课叫《开关稳压电源设计》,就是专门讲开关电源的。
BUCK电路:
BUCK 电路是一种 DC-DC 转换器,是通过震荡电路将一直流电压转变为一高频电源,然后通过脉冲变压器、整流滤波回路输出需要的直流电压。
BUCK 变换器工作在电感电流连续模式下的工作原理:通过控制制电路输出的驱动脉冲控制开关管的导通与关断受。
a、当控制电路脉冲输出高电平时,开关管导通,续流二极管 D 阳极电压为零,阴极电压为电压电压 Us,因此反向截止,开关上流过电流 is 流经电感 L 向负载 R 供电; 此时 L 中的电流逐渐上升,在 L 两端产生左端正右端负的自感电势阻碍电流上升,L 将电能转化为磁能存储起来。
b、经过一段时间ton 后,控制电路脉冲为低电平,开关管关断,但 L 中的电流不能突变,这时电感 L 两端产生右端正左端负的自感电势阻碍电流下降,从而使 D 正向偏置导通,于是 L 中的电流经 D 构成回路,电流值 逐渐下降,L 中储存的磁能转化为电能释放出来供给负载 R,经过时间 toff 后,控制电路脉冲又使开关管导通,重复上述过程。

优点:体积小,重量轻,功耗小,稳压范围宽,效率在80%~90%。
缺点:输出纹波电压较高,噪声较大,电压调整率等性能也较差,特别是对模拟电路供电时,将产生较大的影响。**
本次项目是通过锂电池供电(7.4V),供电需求有电机5V电压、舵机工作电压范围为:(4.8V~6V),单片机电源:3.3V,要求精度高,纹波小,运算放大模块工作范围:3.3V,精度高,各传感器工作电源:3.3V。因此我们可以根据需求确定方案。 这里提一下电源方案选型非常好的一款软件——TI公司的WEBENCH,一款非常好的电源选型软件。
WEBENCH软件地址
b、项目中使用到的电源设计方案:
只能说当时比较菜,时间又比较急,没怎么对比就直接上了。
①、5V电源

②、舵机驱动电源
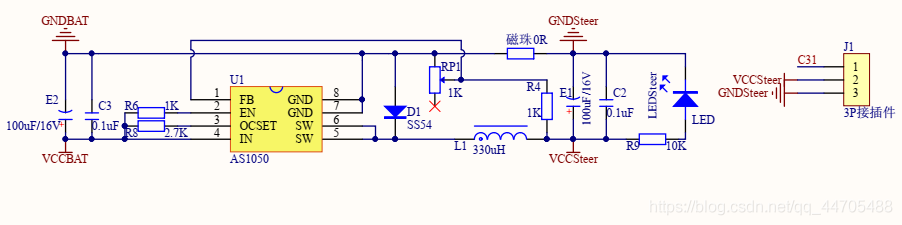
③、单片机和运放电源
单片机这部分的电源主要要注意的是:要保证它的文波小,对特别是要使用ADC去进行模数转换时,基准电压是非常重要的;因此在设计的时候可以选择线性稳压电源,并采集一定的滤波方案。

PCB设计过程中需要注意的一些事项:
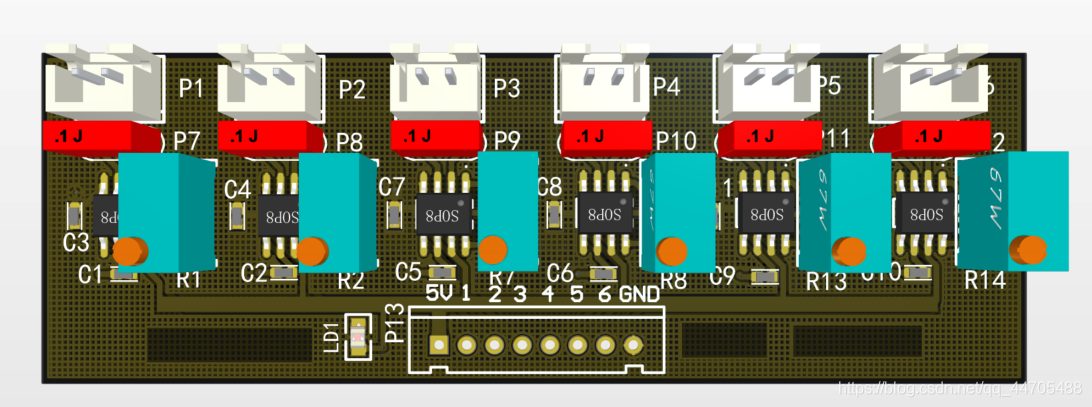
(2)、电感采集模块
电感采集模块相当于电磁智能车的“眼睛”,电磁智能车就是通过它去识别赛道的。原理:因为赛道上铺有电磁信号线,利用的是物理学里面的电感切割磁感线产生感应电流,对感应电流进行IV转换变成电压,然后将电压进行运算放大到单片机ADC能采集到的范围(0~3.3v),利用对称电感的差值来判断车是否偏离赛道。
总结:关于电感的选择,一分钱、一分货,好的东西自然会有好的效果。
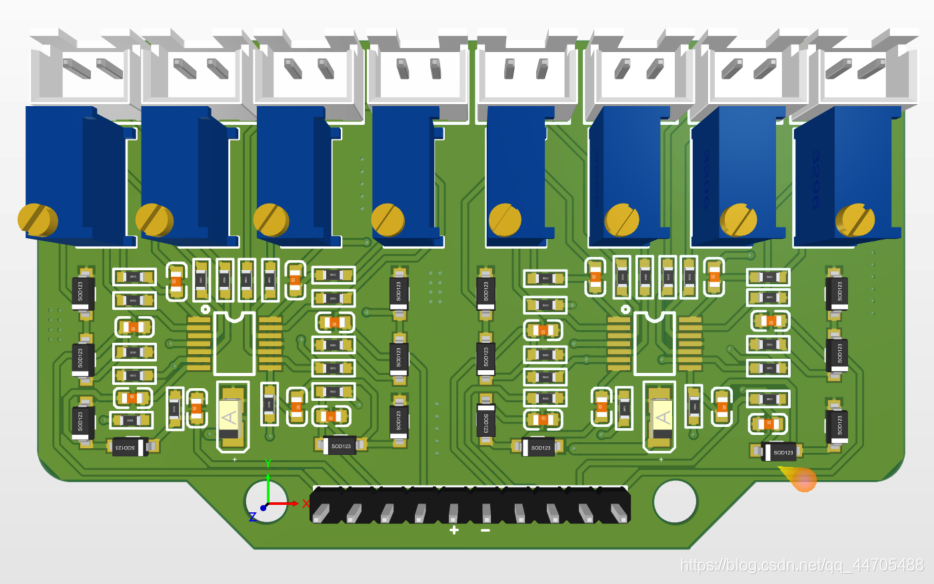
(3)、运算放大模块
运放的其实方案非常多,主要看需要放大的范围。
①、这款我们使用的是TI公司的OPA4377芯片设计的,它的特点就是集成4路运放,可以减小PCB板的大小,我们此次采用的就是这款芯片。
②、这款是基于TI公司的OPA2350芯片,它集成了2路运放,我们上一届学长就是使用了这款运放,然后也取得了不错的成绩!

③、这款是基于AD620芯片设计的,我当时也考虑过这款芯片,但是它只有一路放大,而我们此次需要用到的运放放大的通道比较多,使用这款就会比较占用面积——这款我是在网上找到了大佬开源工程文件。
建议电感采集板、运放板和主板之间建议接口选择FPC接口,这样的好处有:1、信号传输更加稳定,2、各器件之间的连接也稳定。
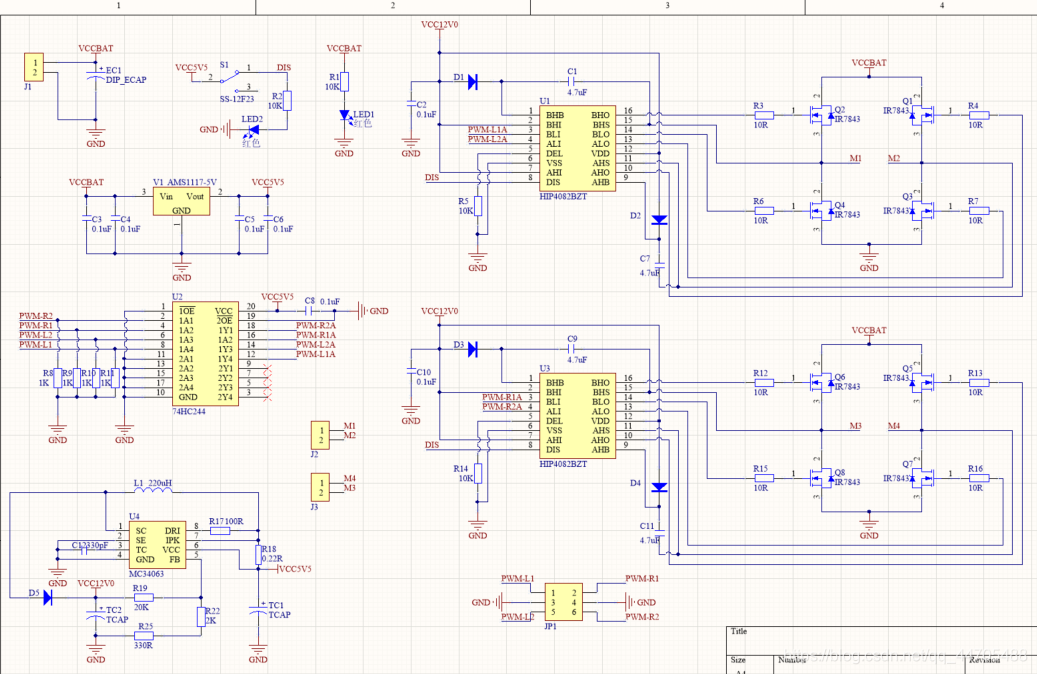
(4)、电机驱动模块
驱动我们是参考了上一届学长的驱动方案,是采用了的是直流电动机可逆双极型桥式驱动器。
全桥驱动原理:
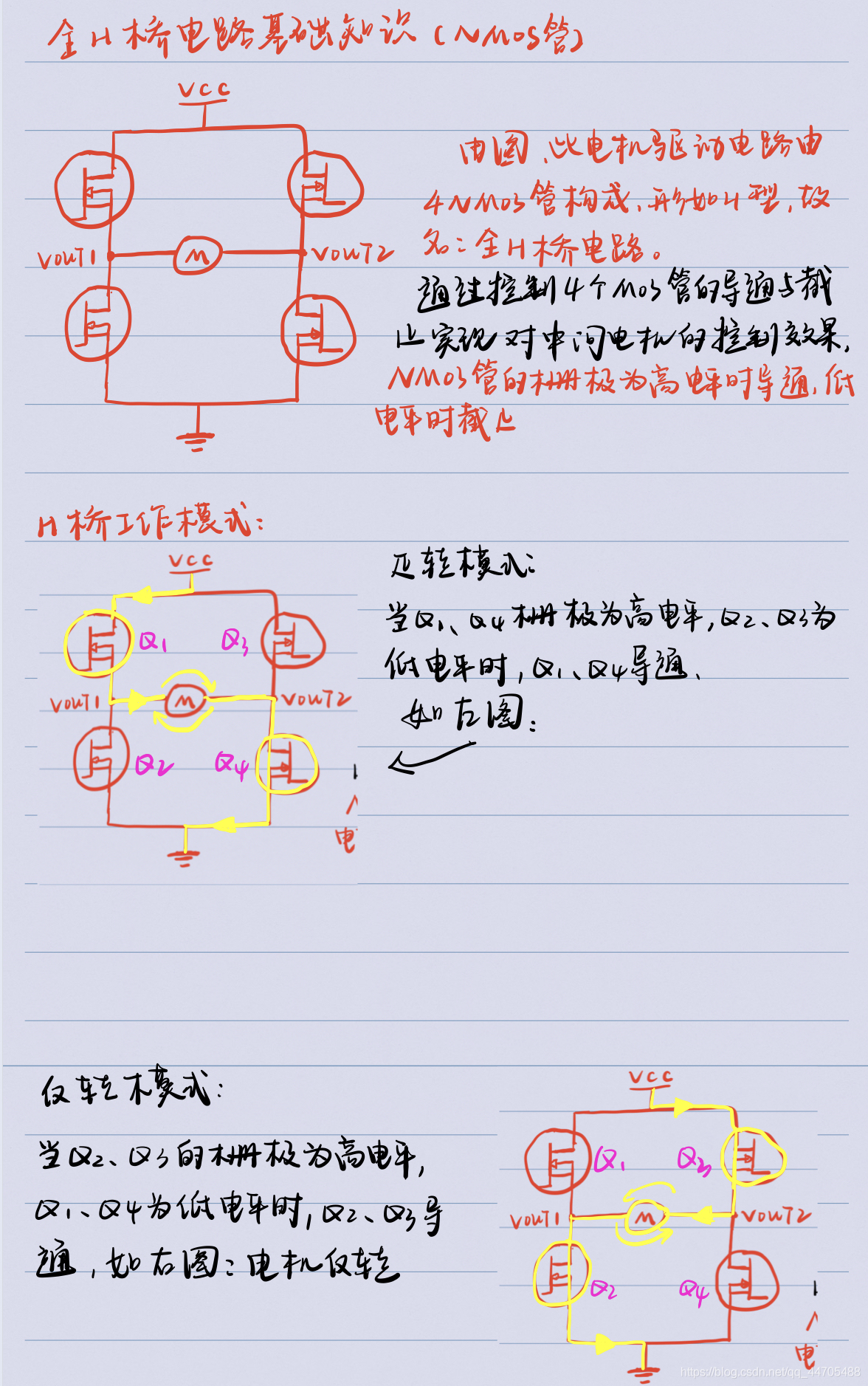
驱动芯片使用的是HIP4082,HIP4082型全桥驱动芯片可以驱动四个 N 沟道MOSFET,能提供较大的栅极驱动电流,并具有硬件死区、硬件防同臂导通等功能,使用 HIP4082 型全桥驱动芯片可以组成完整的直流电机 H桥式驱动电路。

2、介绍一下硬件部分?
(1)、电源模块
怎么去选择整个系统的电源方案呢?
1、进行需求分析:考虑整个系统需要用到哪些电源,有什么要求,比如智能车中我们一般使用电池供电(7.4v);而我们的需要给单片机最小系统供电和运放供电、传感器模块供电、电机、舵机等供电,他们的工作电压都不同,而且对于电磁智能车来说ADC基准电压是非常重要的,要求尽可能的减小文波,因此需求分析是非常重要的。
2、电源参数的设计,
如: 电源输入参数:输入电流/电压;输入电压的波动范围;输入类型等参数。
与之对应的电源输出参数:输出电流/电压;输出电源的质量;输出的类型,是否需要隔离等参数。
3、进行方案的选型与设计:
是使用开关稳压还是使用线性稳压?设计的时候也要考虑成本和PCB面积的大小。
a、线性稳压和开关稳压的区别:
①、线性稳压电源-低压差稳压器(LDO):
1、LDO的结构
简单的LDO是由一个PMOS、一个误差放大器和两个分压电阻组成的,R1、R2组成了一个分压网络,接入误差放大器的正端,与负端的参考电压VREF一起调节PMOS的RDS。VIN 经过 RDS上产生压降,获得 VOUT。在 PMOS电阻 RDS上产生的压降,也就是 VIN与 VOUT之间的压差。可见,输出电流 IOUT 越大,在 RDS 产生的压降也越大。当VIN(对应PMOS的S极)下降时,误差放大器的输出(对应PMOS的G极)也会降低以获得更低的VGS,来驱动PMOS的获得更低的RDS来保持输出电压的稳定。但误差放大器会在 VIN持续下降时的某一点饱和,无法再使 RDS更低。所以当 VIN非常接近甚至低于 VOUT(NOM)时,LDO 会失去调节电压的能力。
优点:稳定性好,瞬态响应速度快,可靠性高,输出电压精度高,输出纹波电压精度小。
缺点:变换效率较低,尤其是在输入输出电压差较大的情况下。如果输出电流也较大,会有明显的发热发烫现象,甚至可能烧坏稳压器。
②、开关稳压电源:
开关稳压电源里面最常用的就是BUCK(降压斩波)电路和BOSST(升压斩波)电路;学电子的有门课叫《开关稳压电源设计》,就是专门讲开关电源的。
BUCK电路:
BUCK 电路是一种 DC-DC 转换器,是通过震荡电路将一直流电压转变为一高频电源,然后通过脉冲变压器、整流滤波回路输出需要的直流电压。
BUCK 变换器工作在电感电流连续模式下的工作原理:通过控制制电路输出的驱动脉冲控制开关管的导通与关断受。
a、当控制电路脉冲输出高电平时,开关管导通,续流二极管 D 阳极电压为零,阴极电压为电压电压 Us,因此反向截止,开关上流过电流 is 流经电感 L 向负载 R 供电; 此时 L 中的电流逐渐上升,在 L 两端产生左端正右端负的自感电势阻碍电流上升,L 将电能转化为磁能存储起来。
b、经过一段时间ton 后,控制电路脉冲为低电平,开关管关断,但 L 中的电流不能突变,这时电感 L 两端产生右端正左端负的自感电势阻碍电流下降,从而使 D 正向偏置导通,于是 L 中的电流经 D 构成回路,电流值 逐渐下降,L 中储存的磁能转化为电能释放出来供给负载 R,经过时间 toff 后,控制电路脉冲又使开关管导通,重复上述过程。
优点:体积小,重量轻,功耗小,稳压范围宽,效率在80%~90%。
缺点:输出纹波电压较高,噪声较大,电压调整率等性能也较差,特别是对模拟电路供电时,将产生较大的影响。**
本次项目是通过锂电池供电(7.4V),供电需求有电机5V电压、舵机工作电压范围为:(4.8V~6V),单片机电源:3.3V,要求精度高,纹波小,运算放大模块工作范围:3.3V,精度高,各传感器工作电源:3.3V。因此我们可以根据需求确定方案。 这里提一下电源方案选型非常好的一款软件——TI公司的WEBENCH,一款非常好的电源选型软件。
WEBENCH软件地址
b、项目中使用到的电源设计方案:
只能说当时比较菜,时间又比较急,没怎么对比就直接上了。
①、5V电源
②、舵机驱动电源
③、单片机和运放电源
单片机这部分的电源主要要注意的是:要保证它的文波小,对特别是要使用ADC去进行模数转换时,基准电压是非常重要的;因此在设计的时候可以选择线性稳压电源,并采集一定的滤波方案。
PCB设计过程中需要注意的一些事项:
(2)、电感采集模块
电感采集模块相当于电磁智能车的“眼睛”,电磁智能车就是通过它去识别赛道的。原理:因为赛道上铺有电磁信号线,利用的是物理学里面的电感切割磁感线产生感应电流,对感应电流进行IV转换变成电压,然后将电压进行运算放大到单片机ADC能采集到的范围(0~3.3v),利用对称电感的差值来判断车是否偏离赛道。
总结:关于电感的选择,一分钱、一分货,好的东西自然会有好的效果。
(3)、运算放大模块
运放的其实方案非常多,主要看需要放大的范围。
①、这款我们使用的是TI公司的OPA4377芯片设计的,它的特点就是集成4路运放,可以减小PCB板的大小,我们此次采用的就是这款芯片。
②、这款是基于TI公司的OPA2350芯片,它集成了2路运放,我们上一届学长就是使用了这款运放,然后也取得了不错的成绩!
③、这款是基于AD620芯片设计的,我当时也考虑过这款芯片,但是它只有一路放大,而我们此次需要用到的运放放大的通道比较多,使用这款就会比较占用面积——这款我是在网上找到了大佬开源工程文件。
建议电感采集板、运放板和主板之间建议接口选择FPC接口,这样的好处有:1、信号传输更加稳定,2、各器件之间的连接也稳定。
(4)、电机驱动模块
驱动我们是参考了上一届学长的驱动方案,是采用了的是直流电动机可逆双极型桥式驱动器。
全桥驱动原理:
驱动芯片使用的是HIP4082,HIP4082型全桥驱动芯片可以驱动四个 N 沟道MOSFET,能提供较大的栅极驱动电流,并具有硬件死区、硬件防同臂导通等功能,使用 HIP4082 型全桥驱动芯片可以组成完整的直流电机 H桥式驱动电路。

 举报
举报




