前 言:创龙科技已基于IMX8、ZYNQ、AM5728、AM5708、AM437x、AM335x、T3/A40i等平台提供了开源EtherCAT主站IgH案例。本文主要演示TLZ7x-EasyEVM-S评估板基于IgH EtherCAT控制伺服电机方法。
案例适用开发环境:
Windows开发环境:Windows 7 64bit、Windows 10 64bit
Linux开发环境:Ubuntu 14.04.3 64bit
虚拟机:VMware15.1.0
PetaLinux:2017.4
Kernel:linux-xlnx-xenomai-g7645980-v1.0
IgH EtherCAT:ethercat-stable-1.5-gcd0d17d-20210723
Xenomai:xenomai-v3.0.11-g4f49146
伺服驱动器:台达ASD-A2-0121-E
伺服电机:台达ECMA-C10401GS
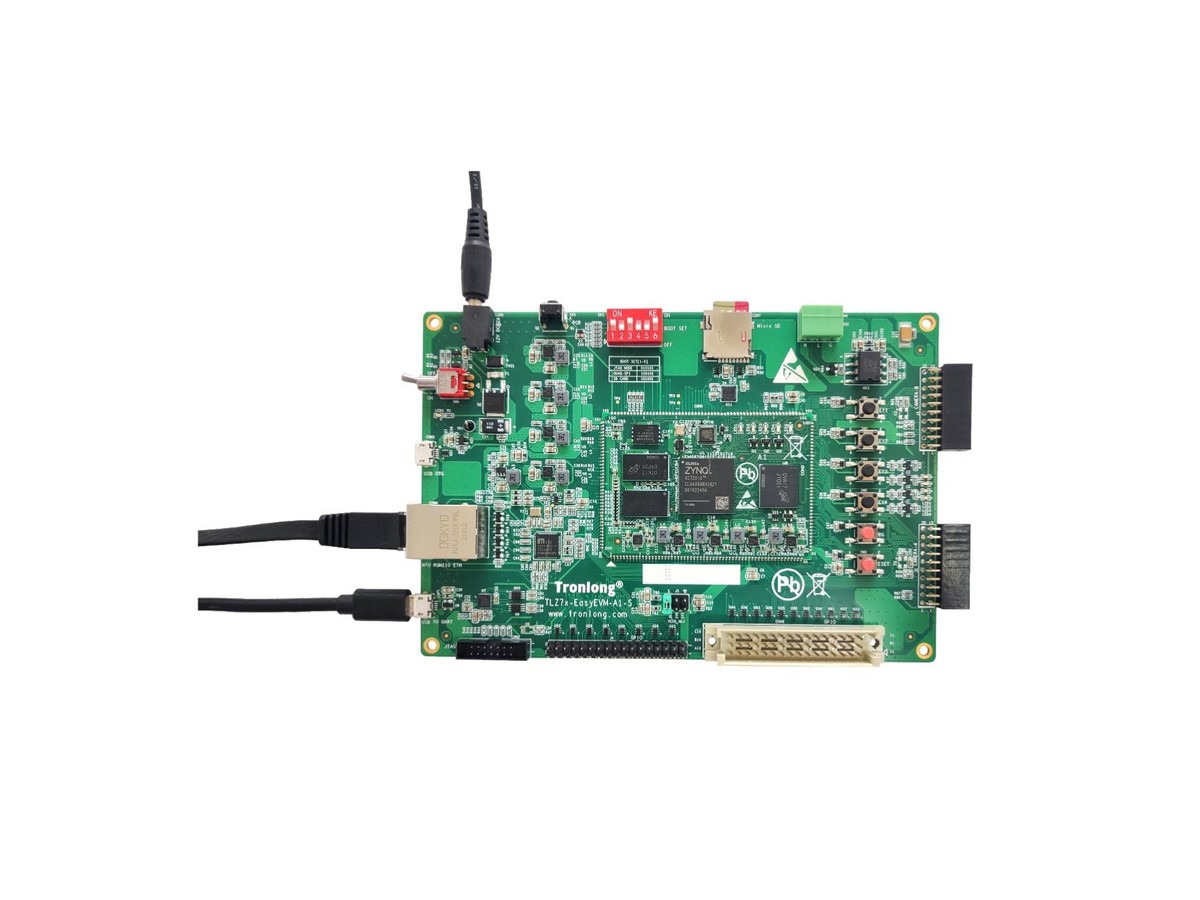
硬件平台:TLZ7x-EasyEVM-S评估板(Xilinx Zynq-7010/7020)
图 1 TLZ7x-EasyEVM评估板
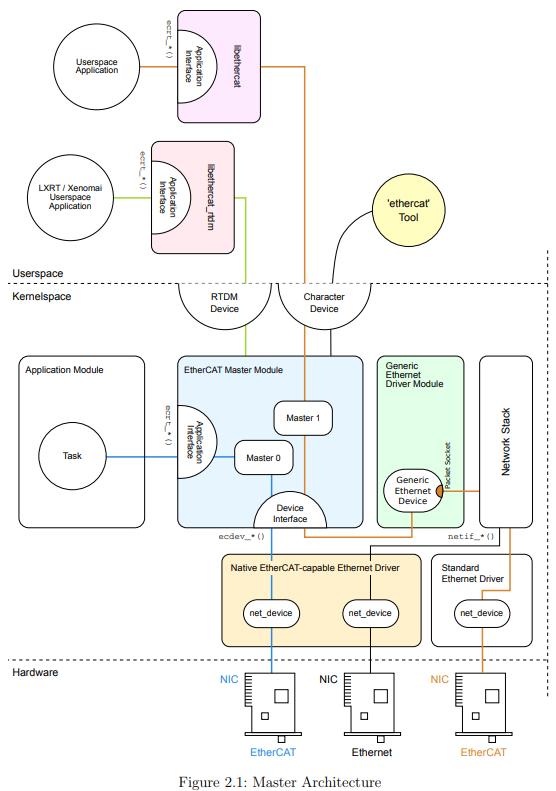
IgH EtherCAT简介IgH EtherCAT为运行于Linux系统的免费开源EtherCAT主站程序,框架如下所示。
图 3
IgH EtherCAT主站通过构建Linux字符设备,应用程序通过对字符设备的访问实现与EtherCAT主站模块的通信。 IgH EtherCAT开发包提供EtherCAT工具,该工具提供各种可在Linux用户层运行的命令,可直接实现对从站的访问和设置,如设置从站地址、显示总线配置、显示PDO数据、读写SDO参数等。
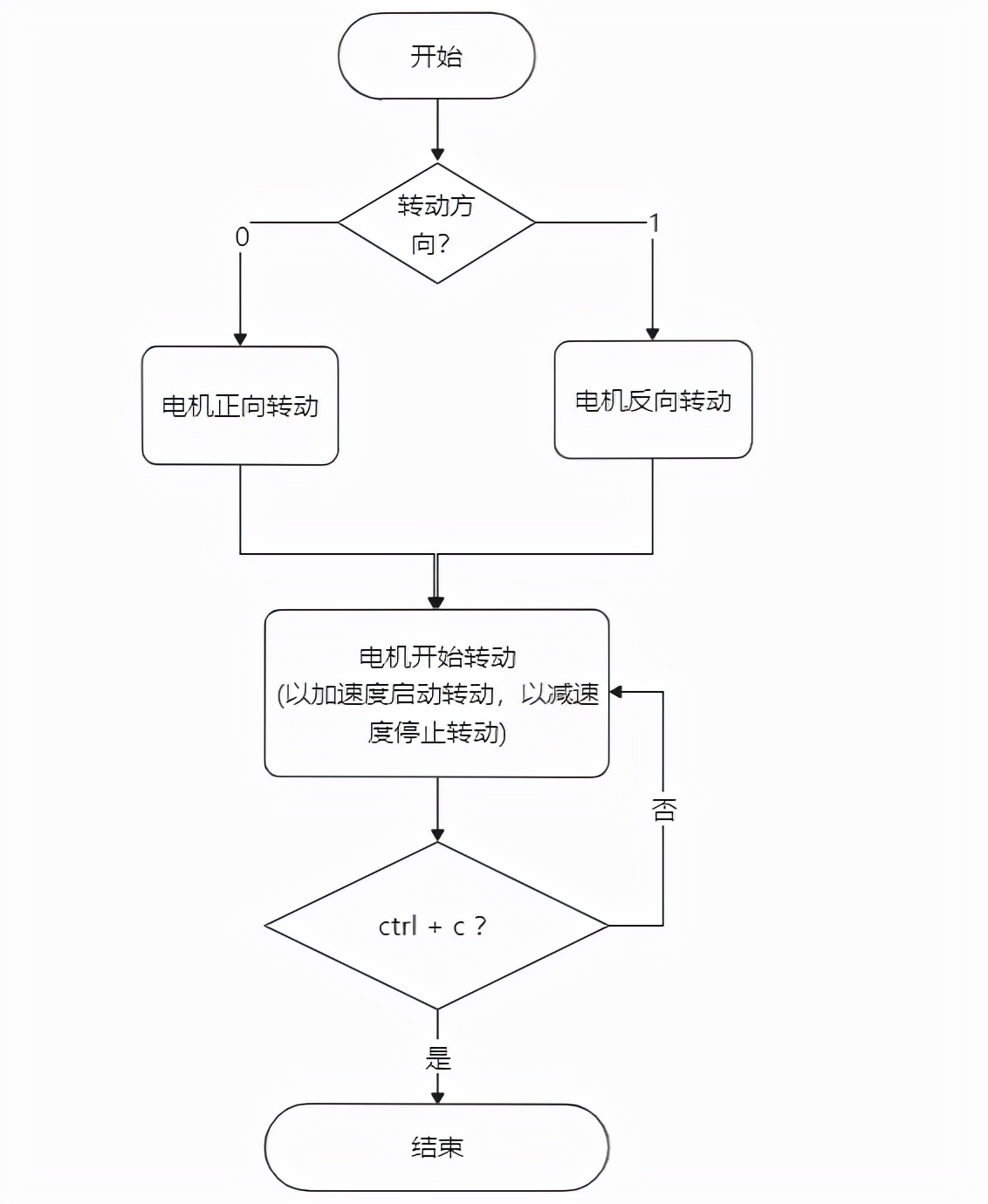
案例说明案例功能:控制伺服电机正转和反转。
- 正转:伺服电机目标速度从0加速到10000,当达到10000速度后,控制伺服电机减速至0,循环运行。
- 反转:伺服电机目标速度从0加速到-10000,当达到-10000速度后,控制伺服电机减速至0,循环运行。
图 4
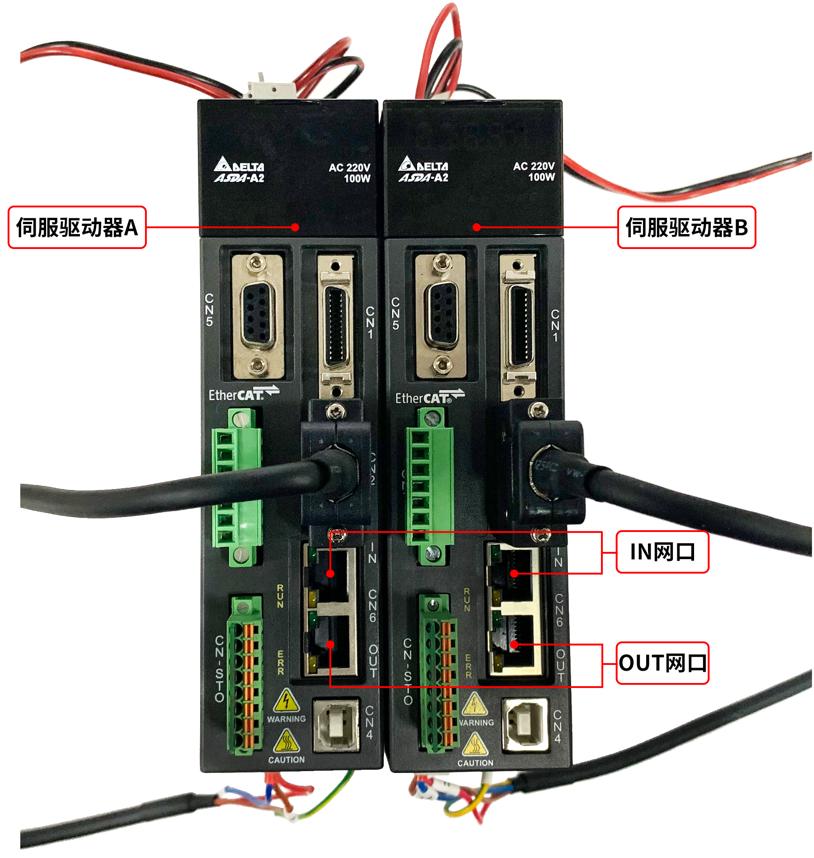
案例测试请按下图所示使用网线连接评估板RGMII ETH网口和伺服驱动器A的IN网口,将伺服驱动器A的OUT网口使用网线连接至伺服驱动器B的IN网口。
图 5
图 6
为便于测试,我司提供已验证的基于Xenomai编译生成的内核镜像文件和设备树镜像文件,位于案例"igh_ethercat_dc_motorkernel-xenomaiimageslinux-xlnx-xenomai-g7645980-v1.0"目录下,请替换至Linux系统启动卡rootfs分区boot目录下。同时将linux-xlnx-xenomai-g7645980-v1.0目录下的module驱动压缩包4.9.0-xilinx-g7645980.tar.gz,解压至Linux系统启动卡rootfs分区"lib/modules/"目录下。
备注:如需使用由内核源码重新编译生成的内核镜像文件和设备树文件,请参考Linux系统使用手册将编译的module驱动安装至Linux系统启动卡中,默认安装后module驱动目录为4.9.0-xilinx。
图 7
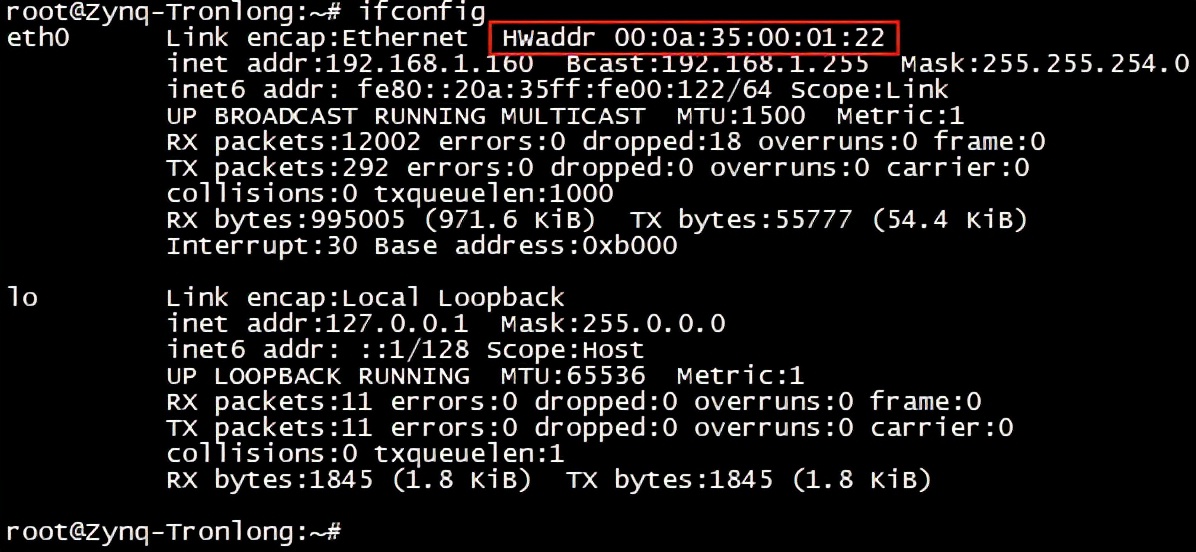
将IgH EtherCAT主站程序文件夹整个拷贝至评估板文件系统,执行如下命令查询评估板网卡物理地址。
图 9
执行如下命令加载驱动模块。
Target# insmod /home/root/_install/modules/ec_master.ko main_devices=00:0a:35:00:01:22
图 10
执行如下命令拷贝EtherCAT主站相关文件至评估板文件系统。
Target# mkdir /etc/sysconfig
Target# cp _install/etc/sysconfig/ethercat /etc/sysconfig
Target# cp _install/modules/ec_master.ko /lib/modules/4.9.0-xilinx-g7645980/ //模块驱动名称可通过"uname -r"查看
Target# depmod //同步模块依赖关系
图 11
执行如下命令启动EtherCAT主站。
Target# /home/root/_install/etc/init.d/ethercat start
图 12
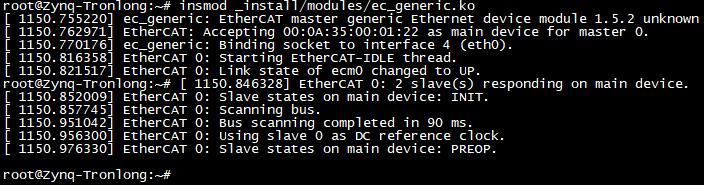
执行如下命令加载ec_generic.ko驱动文件。
Target# insmod _install/modules/ec_generic.ko
图 13
执行如下命令添加IgH动态链接库路径。
Target# export LD_LIBRARY_PATH=$LD_LIBRARY_PATH:/home/root/_install/lib
图 14
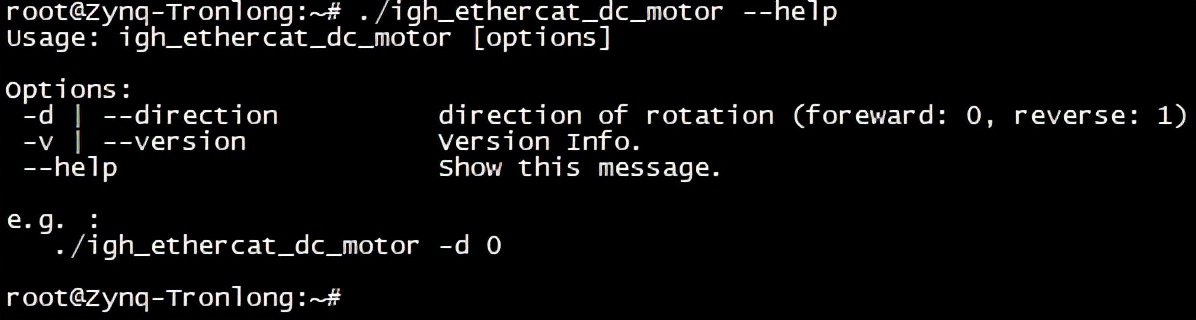
将案例igh_ethercat_dc_motor可执行文件拷贝至评估板文件系统,执行如下命令查看参数信息。
Target# ./igh_ethercat_dc_motor --help
图 15
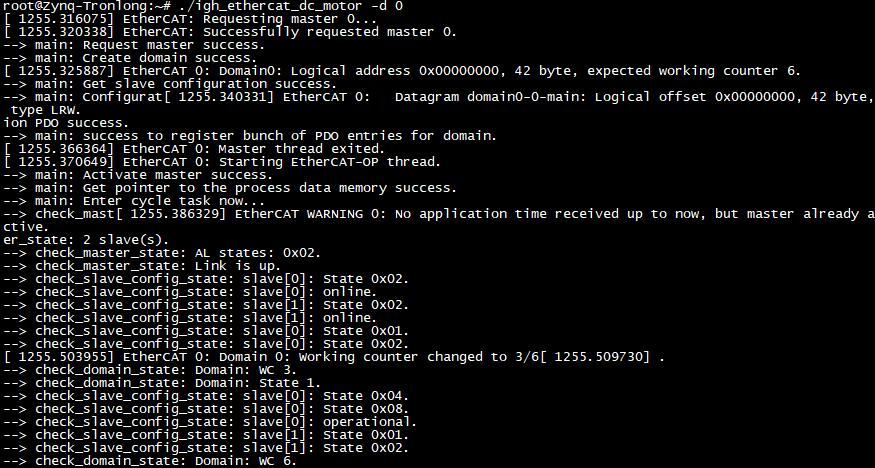
执行如下命令控制两台伺服电机同时正转。
Target# ./igh_ethercat_dc_motor -d 0
图 16
图 17
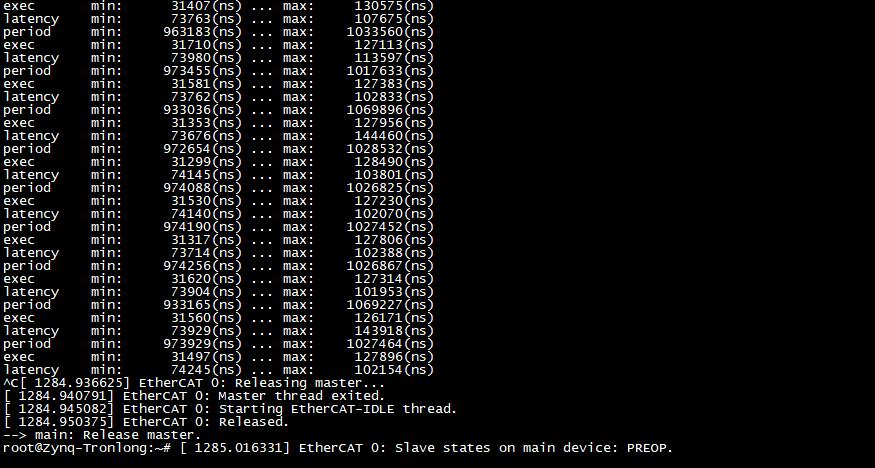
按下"Ctrl+C"停止运行程序。
图 18
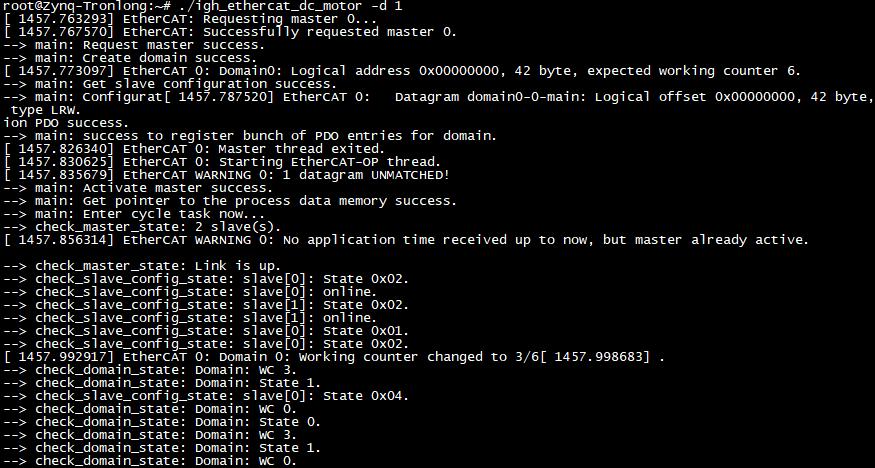
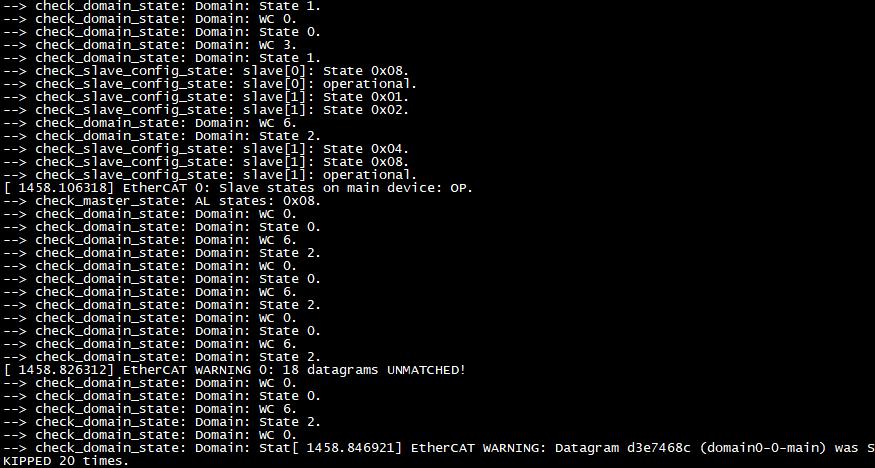
执行如下命令控制两台伺服电机同时反转。
Target# ./igh_ethercat_dc_motor -d 1
图 19
图 20
图 21
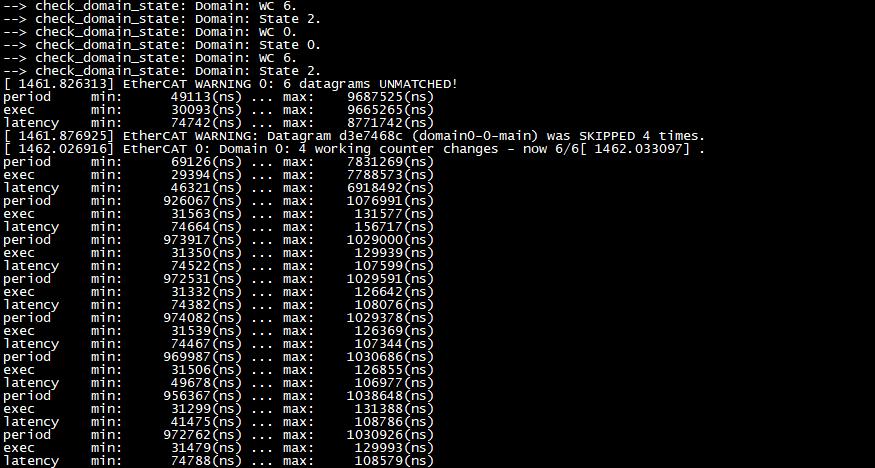
按下"Ctrl+C"停止运行程序。
图 22
备注:案例设置EtherCAT周期为1ms,同时串口循环打印EtherCAT周期的最小值和最大值。
参数解析:
- latency:等待唤醒时间。
- period:EtherCAT通讯周期时间。
- exec:接收和发送EtherCAT数据时间。