2.3 STM32电机PID速度控制
之前的文章,完成了直流减速电机的PWM控制、电机测速。本篇文章,将实现电机的速度闭环控制。
2.3.1 解决的问题
解决带编码器直流电机的速度闭环问题。
2.3.2 PID理论
将偏差的比例、积分、微分,通过线性组合构成控制量,用控制量对被控对象进行控制,这样的控制器称为PID控制器。在连续空间中,我们通常探讨模拟PID的控制原理,如图所示:
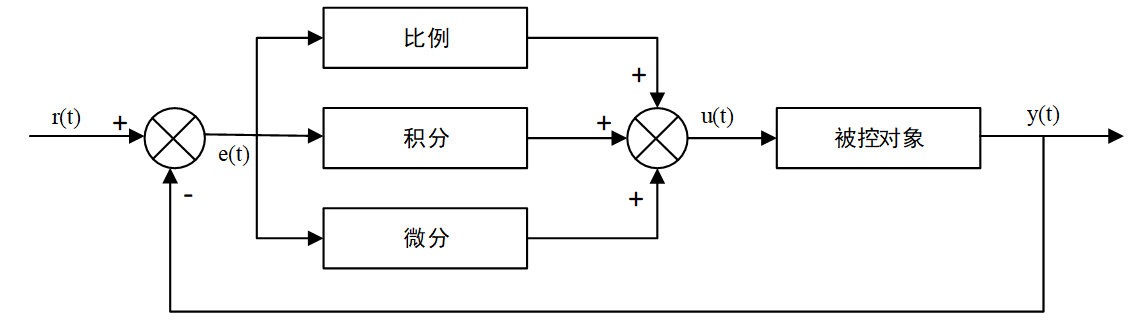
我们这里用电机速度控制为例,讲解PID控制系统。r(t)为设定电机速度、y(t)为实际电机速度、e(t)=y(t)-r(t)为速度差值作为PID控制器的输入、u(t)为PID控制器的输出,作用到被控对象电机上。根据模拟PID控制器,科学家们也得出了模拟PID控制的公式。
2.3 STM32电机PID速度控制
之前的文章,完成了直流减速电机的PWM控制、电机测速。本篇文章,将实现电机的速度闭环控制。
2.3.1 解决的问题
解决带编码器直流电机的速度闭环问题。
2.3.2 PID理论
将偏差的比例、积分、微分,通过线性组合构成控制量,用控制量对被控对象进行控制,这样的控制器称为PID控制器。在连续空间中,我们通常探讨模拟PID的控制原理,如图所示:
我们这里用电机速度控制为例,讲解PID控制系统。r(t)为设定电机速度、y(t)为实际电机速度、e(t)=y(t)-r(t)为速度差值作为PID控制器的输入、u(t)为PID控制器的输出,作用到被控对象电机上。根据模拟PID控制器,科学家们也得出了模拟PID控制的公式。

 举报
举报




