话说最近做了一个数控电源
首先原理图来一个 看看原理
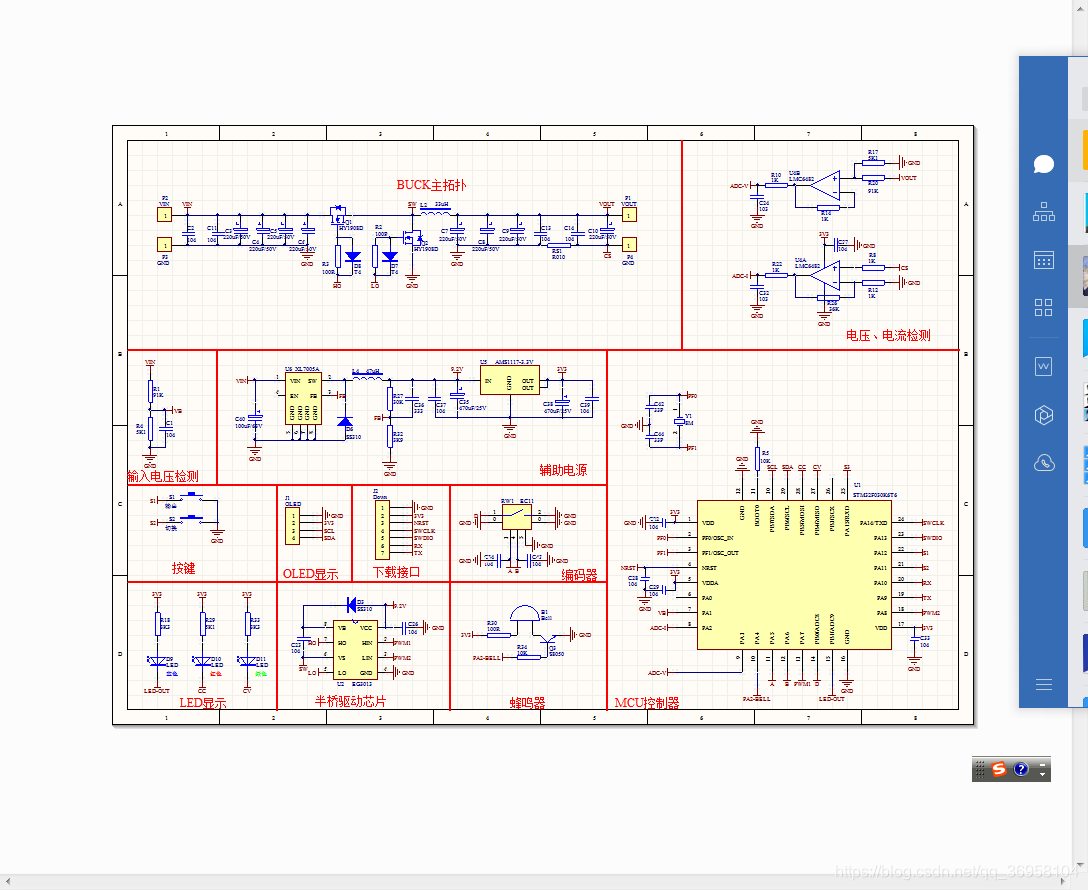
既然讲到数控电源,难免讲解一下数控电源的知识点,升降压 MOS管,
我所做的是BUCK降压电路
一、Buck电路原理图

Buck电路,又称降压电路,其基本特征是DC-DC转换电路,输出电压低于输入电压。输入电流为脉动的,输出电流为连续的
二、Buck电路工作原理
当开关管Q1驱动为高电平时,开关管导通,储能电感L1被充磁,流经电感的电流线性增加,同时给电容C1充电,给负载R1提供能量。等效电路如图二

图二
当开关管Q1驱动为低电平时,开关管关断,储能电感L1通过续流二极管放电,电感电流线性减少,输出电压靠输出滤波电容C1放电以及减小的电感电流维持,等效电路如图三

图三
三、Buck电路的三种工作模式:CCM,BCM,DCM
1、CCM Mode:关键点原件波形见图四

图四
开关管Q1导通时,根据KVL定律:


2、BCM Mode:关键点原件波形见图五

图五

3、DCM Mode:关键点原件波形见图六

图六

四、外为参数对系统工作模式的影响:

图七

五、BUCK电路仿真验证:


图八


2、CCM模式仿真验证:在上述BCM分析的基础上,得出储能电感的电感量80uH为临界点,由系统工作在CCM的条件,可以将储能电感电感量设置为120uH,理论计算:

参照图十,可以得出仿真结果,


3、DCM模式仿真验证:在上述BCM分析的基础上,得出储能电感的电感量80uH为临界点,由系统工作在DCM的条件,可以将储能电感电感量设置为40uH。重点验证输入输出电压关系以及输出平均电流关系。




以上的知识点 是我在其他网站上看到的,觉得很不错,大家可以学习基本的BUCK电路,以此来设计属于自己的电路
调压调流 具有过压保护
过流保护
MOS管的开启关断 ,双闭环控制 输出电压 电流采样
输入电压采样 PID 算法
#include "pid.h"
/**
* @brief pidInit
* @param None
* @retval None
*/
void pidInit(PidObject* pid)
{
pid->ap = pid->kp * (1 + pid->dt / pid->ki + pid->kd / pid->dt);
pid->ai = pid->kp * (1 + 2 * pid->kd / pid->dt);
pid->ad = pid->kp * pid->kd / pid->dt;
}
/**
* @brief pidUpdate
* @param None
* @retval None
*/
float pidUpdate(PidObject* pid, const float desired, const float now_value)
{
float output=0.0f;
pid->error = desired - now_value;
pid->inc = (pid->ap * pid->error) - (pid->ai * pid->prevError1) + (pid->ad * pid->prevError2);
output = pid->inc + pid->outLast1;
if(output > pid->iLimitHigh)
{
output = pid->iLimitHigh;
}
if(output < pid->iLimitLow)
{
output = pid->iLimitLow;
}
pid->prevError2 = pid->prevError1;
pid->prevError1 = pid->error;
pid->outLast1 = output;
return output;
}
/**
* @brief pid calear
* @param None
* @retval None
*/
void pidClear(PidObject* pid)
{
pid->error = 0;
pid->prevError1 = 0;
pid->prevError2 = 0;
pid->outLast1 = 0;
pid->inc = 0;
}
/**
* @brief pidReset
* @param None
* @retval None
*/
void pidReset(PidObject* pid)
{
pid->error = 0.0f;
pid->prevError1 = 0.0f;
pid->prevError2 = 0.0f;
pid->outLast1 = 0.0f;
pid->inc = 0.0f;
pid->desired = 0.0f;
pid->iLimitHigh = 0.0f;
pid->iLimitLow = 0.0f;
pid->dt = 0.0f;
pid->kp = 0.0f;
pid->ki = 0.0f;
pid->kd = 0.0f;
pid->ad = 0.0f;
pid->ai = 0.0f;
pid->ap = 0.0f;
}
* @brief This function ...
* @param None
* @retval None
*/
static uint16_t cnt=0;
void myControlTask(void)
{
float fb_io=0.0f;
float fb_vo=0.0f;
float fb_w=0.0f;
// OLED_ShowChar(16, 2, ':', 16);
if(device.outputState!=0)
{
device.iovp = (power.Vi>PW_VOLTAGV_IN_MAX)?1:0; //输入过压保护
device.iuvp = (power.Vi
device.oocp = (power.Io>PW_CURRENT_OUT_MAX)?1:0; //输出过流保护
device.oovp = (power.Vo>(PW_VOLTAGV_OUT_MAX+0.5f))?1:0; //输出过压保护
if(device.iovp||device.iuvp||device.oocp||device.oovp)
{
PWM_Stop();
device.recoveryCnt = 0;
LED_OUT_OFF;
LED_CV_CC_OFF;
}
else
{ //故障恢复
device.recoveryCnt = (device.recoveryCnt>device.faultTime)?device.recoveryCnt:device.recoveryCnt+1;
}
fb_io = ((float)power.channel[1] - calib.ioZero) * calib.ioRatio;
fb_vo = power.channel[2] * calib.voRatio;
if(fb_io<0)
{
fb_io = 0;
}
/* 大电流补偿压差 */
#if _USE_COMPENSATE
fb_vo -= (fb_io * 0.05f);
if(fb_vo<0)
{
fb_vo = 0;
}
#endif
/* */
/* 恒功率 */
#if 1
fb_w = fb_vo*fb_io;
if(fb_w>250.0f)
{
PWM_Stop();
device.recoveryCnt = 0;
LED_OUT_OFF;
LED_CV_CC_OFF;
}
#endif
/* */
if(device.recoveryCnt==device.faultTime) //恢复PWM波形输出
{
pidClear(&vPID);
pidClear(&iPID);
device.controlPWM = 0;
PWM_Start();
PWM_Update(device.controlPWM);
LED_OUT_ON;
}
if(device.recoveryCnt>=device.faultTime)
{
switch(device.controlMode)
{
case CV_MODE:
device.controlPWM = pidUpdate(&vPID, vPID.desired, fb_vo); //电压环PID计算
iPID.outLast1 = device.controlPWM;
device.controlMode = (fb_io
if(cnt%50==0) { LED_CV_ON; }
break;
case CC_MODE:
device.controlPWM = pidUpdate(&iPID, iPID.desired, fb_io); //电流环PID计算
vPID.outLast1 = device.controlPWM;
device.controlMode = (fb_vo>vPID.desired)?CV_MODE:CC_MODE;
if(cnt%50==0) { LED_CC_ON; }
break;
default:
device.controlMode = CV_MODE;
break;
}
PWM_Update(device.controlPWM);
}
cnt++;
}
}
话说最近做了一个数控电源
首先原理图来一个 看看原理
既然讲到数控电源,难免讲解一下数控电源的知识点,升降压 MOS管,
我所做的是BUCK降压电路
一、Buck电路原理图
Buck电路,又称降压电路,其基本特征是DC-DC转换电路,输出电压低于输入电压。输入电流为脉动的,输出电流为连续的
二、Buck电路工作原理
当开关管Q1驱动为高电平时,开关管导通,储能电感L1被充磁,流经电感的电流线性增加,同时给电容C1充电,给负载R1提供能量。等效电路如图二
图二
当开关管Q1驱动为低电平时,开关管关断,储能电感L1通过续流二极管放电,电感电流线性减少,输出电压靠输出滤波电容C1放电以及减小的电感电流维持,等效电路如图三
图三
三、Buck电路的三种工作模式:CCM,BCM,DCM
1、CCM Mode:关键点原件波形见图四
图四
开关管Q1导通时,根据KVL定律:
2、BCM Mode:关键点原件波形见图五
图五
3、DCM Mode:关键点原件波形见图六
图六
四、外为参数对系统工作模式的影响:
图七
五、BUCK电路仿真验证:
图八
2、CCM模式仿真验证:在上述BCM分析的基础上,得出储能电感的电感量80uH为临界点,由系统工作在CCM的条件,可以将储能电感电感量设置为120uH,理论计算:
参照图十,可以得出仿真结果,
3、DCM模式仿真验证:在上述BCM分析的基础上,得出储能电感的电感量80uH为临界点,由系统工作在DCM的条件,可以将储能电感电感量设置为40uH。重点验证输入输出电压关系以及输出平均电流关系。
以上的知识点 是我在其他网站上看到的,觉得很不错,大家可以学习基本的BUCK电路,以此来设计属于自己的电路
调压调流 具有过压保护
过流保护
MOS管的开启关断 ,双闭环控制 输出电压 电流采样
输入电压采样 PID 算法
#include "pid.h"
/**
* @brief pidInit
* @param None
* @retval None
*/
void pidInit(PidObject* pid)
{
pid->ap = pid->kp * (1 + pid->dt / pid->ki + pid->kd / pid->dt);
pid->ai = pid->kp * (1 + 2 * pid->kd / pid->dt);
pid->ad = pid->kp * pid->kd / pid->dt;
}
/**
* @brief pidUpdate
* @param None
* @retval None
*/
float pidUpdate(PidObject* pid, const float desired, const float now_value)
{
float output=0.0f;
pid->error = desired - now_value;
pid->inc = (pid->ap * pid->error) - (pid->ai * pid->prevError1) + (pid->ad * pid->prevError2);
output = pid->inc + pid->outLast1;
if(output > pid->iLimitHigh)
{
output = pid->iLimitHigh;
}
if(output < pid->iLimitLow)
{
output = pid->iLimitLow;
}
pid->prevError2 = pid->prevError1;
pid->prevError1 = pid->error;
pid->outLast1 = output;
return output;
}
/**
* @brief pid calear
* @param None
* @retval None
*/
void pidClear(PidObject* pid)
{
pid->error = 0;
pid->prevError1 = 0;
pid->prevError2 = 0;
pid->outLast1 = 0;
pid->inc = 0;
}
/**
* @brief pidReset
* @param None
* @retval None
*/
void pidReset(PidObject* pid)
{
pid->error = 0.0f;
pid->prevError1 = 0.0f;
pid->prevError2 = 0.0f;
pid->outLast1 = 0.0f;
pid->inc = 0.0f;
pid->desired = 0.0f;
pid->iLimitHigh = 0.0f;
pid->iLimitLow = 0.0f;
pid->dt = 0.0f;
pid->kp = 0.0f;
pid->ki = 0.0f;
pid->kd = 0.0f;
pid->ad = 0.0f;
pid->ai = 0.0f;
pid->ap = 0.0f;
}
* @brief This function ...
* @param None
* @retval None
*/
static uint16_t cnt=0;
void myControlTask(void)
{
float fb_io=0.0f;
float fb_vo=0.0f;
float fb_w=0.0f;
// OLED_ShowChar(16, 2, ':', 16);
if(device.outputState!=0)
{
device.iovp = (power.Vi>PW_VOLTAGV_IN_MAX)?1:0; //输入过压保护
device.iuvp = (power.Vi
device.oocp = (power.Io>PW_CURRENT_OUT_MAX)?1:0; //输出过流保护
device.oovp = (power.Vo>(PW_VOLTAGV_OUT_MAX+0.5f))?1:0; //输出过压保护
if(device.iovp||device.iuvp||device.oocp||device.oovp)
{
PWM_Stop();
device.recoveryCnt = 0;
LED_OUT_OFF;
LED_CV_CC_OFF;
}
else
{ //故障恢复
device.recoveryCnt = (device.recoveryCnt>device.faultTime)?device.recoveryCnt:device.recoveryCnt+1;
}
fb_io = ((float)power.channel[1] - calib.ioZero) * calib.ioRatio;
fb_vo = power.channel[2] * calib.voRatio;
if(fb_io<0)
{
fb_io = 0;
}
/* 大电流补偿压差 */
#if _USE_COMPENSATE
fb_vo -= (fb_io * 0.05f);
if(fb_vo<0)
{
fb_vo = 0;
}
#endif
/* */
/* 恒功率 */
#if 1
fb_w = fb_vo*fb_io;
if(fb_w>250.0f)
{
PWM_Stop();
device.recoveryCnt = 0;
LED_OUT_OFF;
LED_CV_CC_OFF;
}
#endif
/* */
if(device.recoveryCnt==device.faultTime) //恢复PWM波形输出
{
pidClear(&vPID);
pidClear(&iPID);
device.controlPWM = 0;
PWM_Start();
PWM_Update(device.controlPWM);
LED_OUT_ON;
}
if(device.recoveryCnt>=device.faultTime)
{
switch(device.controlMode)
{
case CV_MODE:
device.controlPWM = pidUpdate(&vPID, vPID.desired, fb_vo); //电压环PID计算
iPID.outLast1 = device.controlPWM;
device.controlMode = (fb_io
if(cnt%50==0) { LED_CV_ON; }
break;
case CC_MODE:
device.controlPWM = pidUpdate(&iPID, iPID.desired, fb_io); //电流环PID计算
vPID.outLast1 = device.controlPWM;
device.controlMode = (fb_vo>vPID.desired)?CV_MODE:CC_MODE;
if(cnt%50==0) { LED_CC_ON; }
break;
default:
device.controlMode = CV_MODE;
break;
}
PWM_Update(device.controlPWM);
}
cnt++;
}
}

 举报
举报




