黄工无刷电机学习
登录
直播中
闷~~
10年用户
834经验值
擅长:可编程逻辑
私信
关注
[问答]
怎样去搭建一种由转矩方程计算角度速度的矢量控制模型
开启该帖子的消息推送
矢量控制
转矩
模型
怎样去搭建一种由转矩方程计算角度速度的矢量控制模型?
如何对速度环矢量控制模型进行
仿真
?
回帖
(1)
李咏华
2021-10-11 10:10:17
电机控制中,无论什么观测器,最终都是为了得到电机的电角度跟角速度,这里就通过转矩方程来进行简单的速度环矢量控制模型。
目标:搭建简单的由转矩方程计算角度速度的矢量控制模型。
1,数学模型
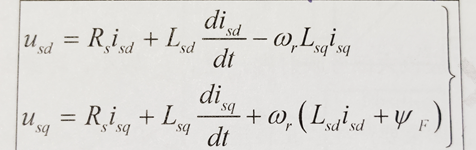
通过很多书籍,我们都可以找到电机在选择坐标系dq下的数学模型,其中定子电压方程如下:
其中usd、usq分别为定子电压的d-q轴分量;isd、isq分别是定子电流的d-q轴分量;Rs是定子的电阻;ψF为永磁体磁链;ωr为电角速度;Lsd、Lsq分别为d-q轴电感分量。
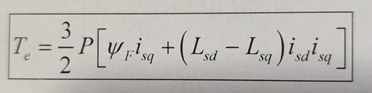
此时电机的电磁转矩方程为:
其中常数3/2是使用了非功率守恒的变换,P为磁对极。
电机转动起来后转矩与电机速度关系为:
T = J * a;
其中T:转矩、J:转动惯量、a:加速度。由于速度是加速度时间上的累加,那么机械角速ωm度计算公式为:
ωm = ∫a dt;
由于电机模型中使用的是角速度ωr,所以可以通过公式:
ωr = P * ωm;
计算出角速度,由上三个式子,可计算出电机角速度ωr公式:
ωr = P * ∫1/J*T dt;
由力的合成可知,转矩T = 电磁转矩Te – 转矩Tm – 摩擦力F,即:
T = Te – Tm – F;
其中摩擦力公式:
F = B * ωm;
即阻尼系数 * 机械角速度。因为最终要得到的是电机转速rpm(转/分),所以还要注意如下几个重要的关系式:
ωr = P * ωm;
V = 60 / 2 * pi * ωm;
Θr = ∫ωr dt;
至此,电机的数学模型公式已经都了解了。接下来要考虑仿真建模的流程。
2,仿真模型分析
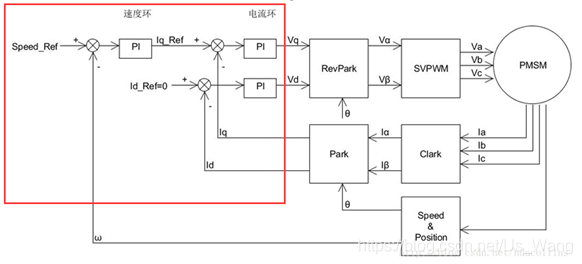
通过电机控制流程框图:
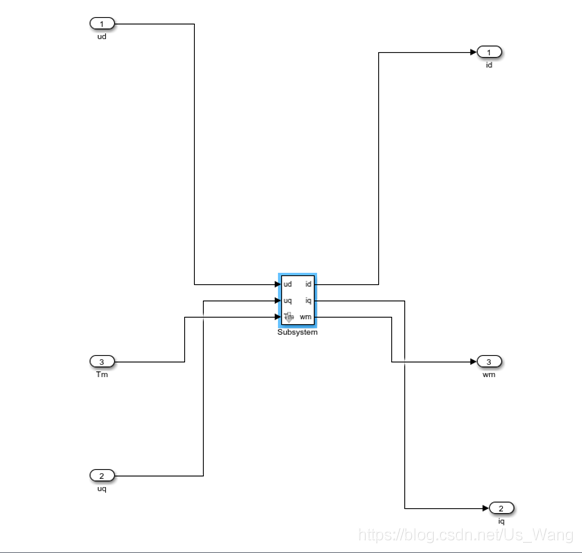
可知我们需要建立的电机模型输入参数为ud、uq、Tm,输出参数为id、iq、ωm。因此理论的控制步骤如下:
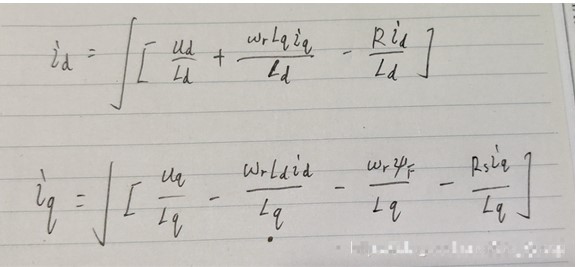
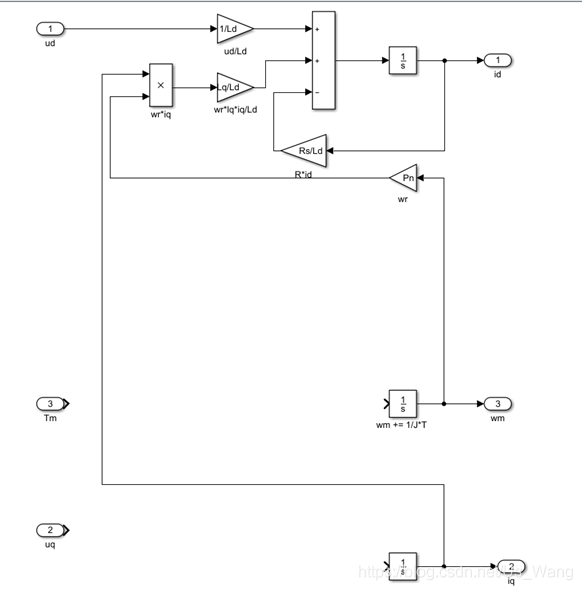
① 通过定子电压方程反推出id、iq的计算方程。
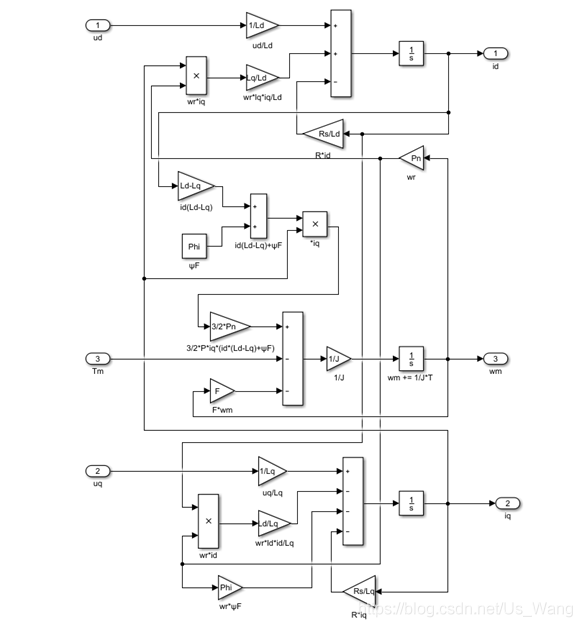
② 电磁转矩方程计算出Te。
③ 计算电机最终转矩T = Te – Tm – F;
④ 通过公式ωr = P * ∫1/J*T dt,计算出角速度ωm。
至此,理论分解完毕,然后开始实际的仿真模型搭建。
3,仿真建模
安装上面的理论步骤一步一步进行搭建:
① 添加需要的输出输入参数:
② 搭建id计算:
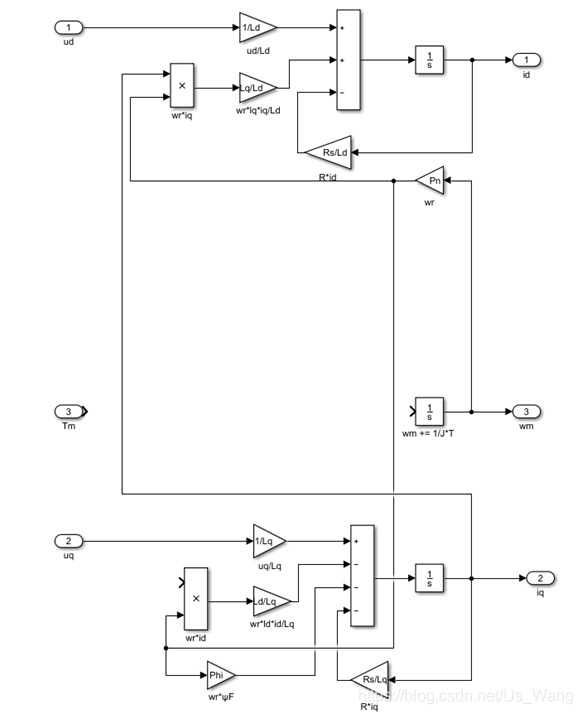
③ 搭建iq计算:
④ 搭建力矩T计算:
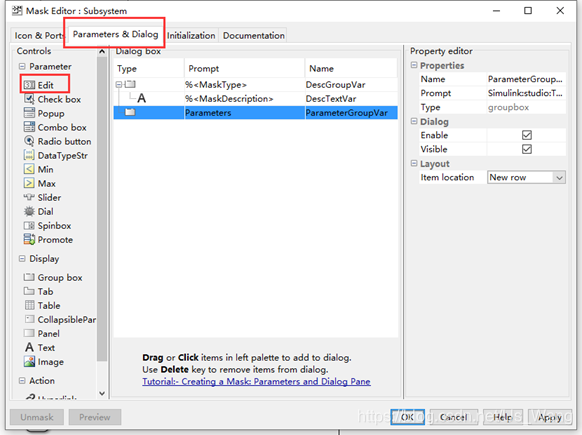
⑤ 封装为Mask,全选Ctrl+G,然后Ctrl+M。
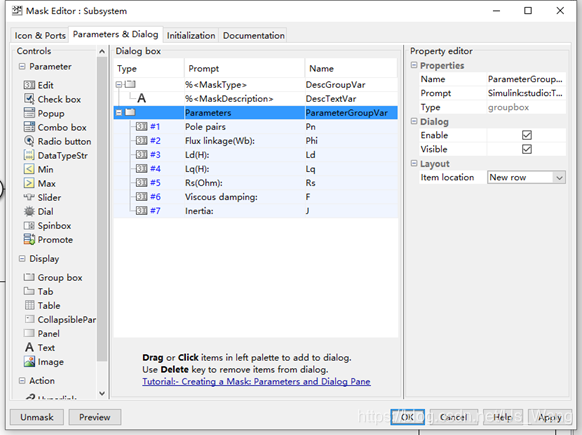
接着进行设定输入数据的创建,点击Edit创建。通过模型的搭建,这里需要设置磁对极Pn、磁链Phi、D轴电感Ld、Q轴电感Lq、电阻Rs、阻尼系数F、转动惯量J。要注意的是,在创建时,需要给每个参数设定一个默认值,不能为0,不然会报错。如下所示:
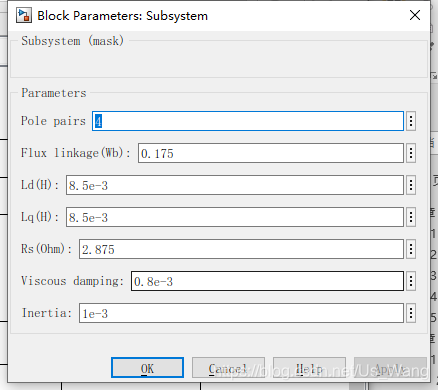
点击OK,然后双击设置好的Mask模块,可以看到参数输入框图:
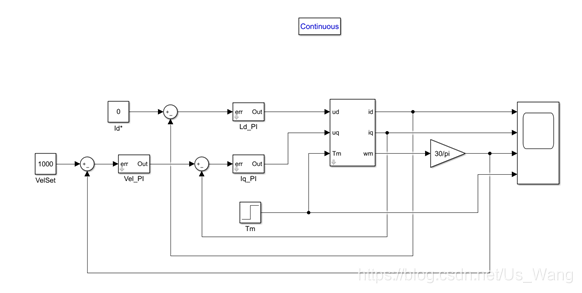
⑥ 进行各个PI环路的搭建,PI控制模块的创建可见上一篇文档“simulink电机仿真学习 - 搭建电流环PI并封装成Mask”。使用Step模块设置一个在0.1s时变为10N.m的力矩,目标转速设为1000,Id目标值设为0。最后不要忘记加上powergui。
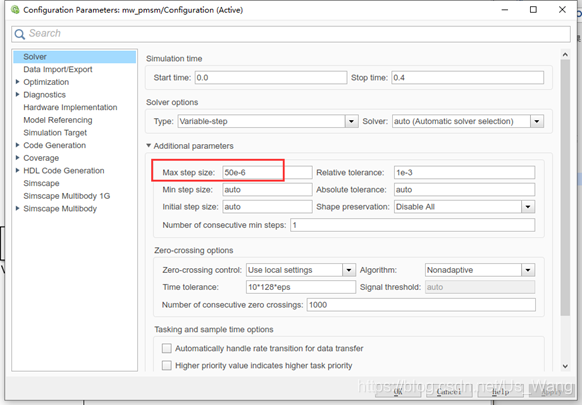
将运行步长设置与控制周期一样及20KHz,设置整个运行周期为0.4S。
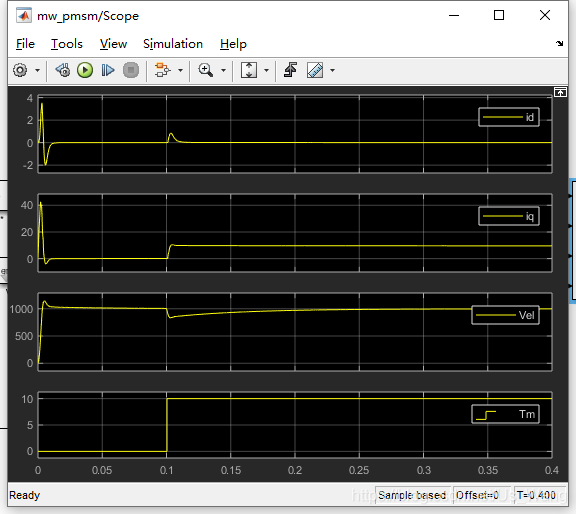
至于PI的参数,一点点调试即可。这里不做讲解。最终运行后的波形如下:
可以发现在0.1s时,负载变大,速度变小,随着iq的变大,速度平稳在1000rpm上,id也维持为0。
至此,“搭建简单的由转矩方程计算角度速度的矢量控制模型”完成。
电机控制中,无论什么观测器,最终都是为了得到电机的电角度跟角速度,这里就通过转矩方程来进行简单的速度环矢量控制模型。
目标:搭建简单的由转矩方程计算角度速度的矢量控制模型。
1,数学模型
通过很多书籍,我们都可以找到电机在选择坐标系dq下的数学模型,其中定子电压方程如下:
其中usd、usq分别为定子电压的d-q轴分量;isd、isq分别是定子电流的d-q轴分量;Rs是定子的电阻;ψF为永磁体磁链;ωr为电角速度;Lsd、Lsq分别为d-q轴电感分量。
此时电机的电磁转矩方程为:
其中常数3/2是使用了非功率守恒的变换,P为磁对极。
电机转动起来后转矩与电机速度关系为:
T = J * a;
其中T:转矩、J:转动惯量、a:加速度。由于速度是加速度时间上的累加,那么机械角速ωm度计算公式为:
ωm = ∫a dt;
由于电机模型中使用的是角速度ωr,所以可以通过公式:
ωr = P * ωm;
计算出角速度,由上三个式子,可计算出电机角速度ωr公式:
ωr = P * ∫1/J*T dt;
由力的合成可知,转矩T = 电磁转矩Te – 转矩Tm – 摩擦力F,即:
T = Te – Tm – F;
其中摩擦力公式:
F = B * ωm;
即阻尼系数 * 机械角速度。因为最终要得到的是电机转速rpm(转/分),所以还要注意如下几个重要的关系式:
ωr = P * ωm;
V = 60 / 2 * pi * ωm;
Θr = ∫ωr dt;
至此,电机的数学模型公式已经都了解了。接下来要考虑仿真建模的流程。
2,仿真模型分析
通过电机控制流程框图:
可知我们需要建立的电机模型输入参数为ud、uq、Tm,输出参数为id、iq、ωm。因此理论的控制步骤如下:
① 通过定子电压方程反推出id、iq的计算方程。
② 电磁转矩方程计算出Te。
③ 计算电机最终转矩T = Te – Tm – F;
④ 通过公式ωr = P * ∫1/J*T dt,计算出角速度ωm。
至此,理论分解完毕,然后开始实际的仿真模型搭建。
3,仿真建模
安装上面的理论步骤一步一步进行搭建:
① 添加需要的输出输入参数:
② 搭建id计算:
③ 搭建iq计算:
④ 搭建力矩T计算:
⑤ 封装为Mask,全选Ctrl+G,然后Ctrl+M。
接着进行设定输入数据的创建,点击Edit创建。通过模型的搭建,这里需要设置磁对极Pn、磁链Phi、D轴电感Ld、Q轴电感Lq、电阻Rs、阻尼系数F、转动惯量J。要注意的是,在创建时,需要给每个参数设定一个默认值,不能为0,不然会报错。如下所示:
点击OK,然后双击设置好的Mask模块,可以看到参数输入框图:
⑥ 进行各个PI环路的搭建,PI控制模块的创建可见上一篇文档“simulink电机仿真学习 - 搭建电流环PI并封装成Mask”。使用Step模块设置一个在0.1s时变为10N.m的力矩,目标转速设为1000,Id目标值设为0。最后不要忘记加上powergui。
将运行步长设置与控制周期一样及20KHz,设置整个运行周期为0.4S。
至于PI的参数,一点点调试即可。这里不做讲解。最终运行后的波形如下:
可以发现在0.1s时,负载变大,速度变小,随着iq的变大,速度平稳在1000rpm上,id也维持为0。
至此,“搭建简单的由转矩方程计算角度速度的矢量控制模型”完成。
举报
更多回帖
rotate(-90deg);
回复
相关问答
矢量控制
转矩
模型
怎样
去
搭建
一种
基于PI调节器的PMSM
矢量控制
系统
模型
?
2021-07-27
1174
如何
去
实现对三相永磁同步电机的
矢量控制
呢
2021-09-22
1553
怎样
去
搭建
一种
基于Simulink的变速恒频双馈风力发电
模型
呢
2021-10-22
1799
怎样
去
设计
一种
矢量控制
系统的电流内环调节器
2021-09-30
2059
请问
怎样
去
设计无
速度
传感器
矢量控制
系统?
2021-04-28
1624
为什么说直接
转矩
控制
实质上是基于定子磁场的
矢量控制
呢?
2023-03-28
1789
空间
矢量控制
系统是
由
哪些部分组成的
2021-10-26
1853
请问
怎样
去
搭建
一种
无刷直流电机的
速度
控制
模型
2021-08-13
1942
怎样
去
搭建
一种
永磁同步电动机
模型
2021-10-08
1843
FOC(电机
矢量控制
)与DTC(直接
转矩
控制
)的区别在哪
2021-08-06
10463
发帖
登录/注册
20万+
工程师都在用,
免费
PCB检查工具
无需安装、支持浏览器和手机在线查看、实时共享
查看
点击登录
登录更多精彩功能!
首页
论坛版块
小组
免费开发板试用
ebook
直播
搜索
登录
×
20
完善资料,
赚取积分




 举报
举报



