1.1 Fanuc数控系统机床数据采集方法
以下介绍的为带有以太网接口的Fanuc数控系统的数据采集方法,如果不带有以太网接口,需要采用串口通讯进行采集。
1.1.1 FOCAS简介和基本功能
采集Fanuc系列的机床数据,我们需要用到FOCAS1/2开发包,FOCAS是FANUC Open CNC API Specifications version 1 or 2的缩写,FOCAS1主要应用于0i和16i/18i/21i/系列,FOCAS2则针对30i/31i/32i系列CNC。
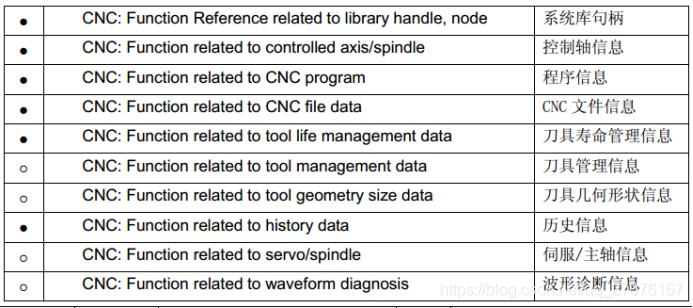
CNC/PMC数据窗口功能可以通过HSSB或以太网(TCP/IP)接口在PC和CNC之间完成交换数据和信息共享,他的主要功能包括以下几部分:
1:CNC:NC控制的伺服轴、主轴相关数据的读写。
包括绝对坐标、相对坐标、机床坐标、剩余移动量以及实际进给速度等。
2:CNC:加工程序的相关操作。
这些操作包括NC程序的上传/下载、程序校检、查找以及删除。读取CNC程序目录以及通过电脑实现CNC加工。
3:CNC:读写CNC文件数据。
这些数据包括刀具偏置、工件坐标系偏置、参数、设定、用户宏程序变量、P-Code宏程序变量以及螺距误差补偿数值。
4:CNC:读写刀具寿命管理信息。
5:CNC:读取历史信息记录。
这些信息包括操作历史记录和报警历史记录。
6:CNC:读取伺服、主轴数据。
7:CNC:读写数据服务器、DNC1、DNC2、OSI-Ethernet(只能使用HSSB)相关信息。
8:CNC:读写波形诊断数据。
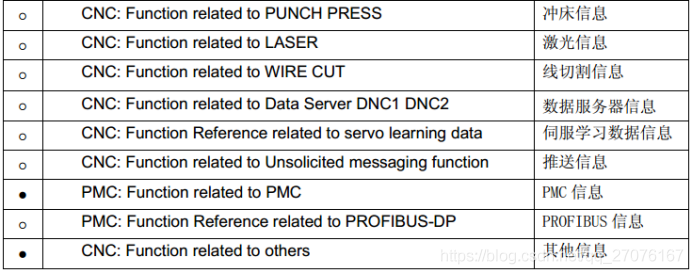
9:CNC:读写冲床CNC数据。
10:CNC:读写激光器CNC数据。
11:CNC:读写伺服学习控制相关数据(只能使用HSSB)。
12:CNC:读写其他数据。
13:PMC:读写PMC相关数据。
这些数据包括G、F、Y、X、A、R、T、C、D地址等。
14:PMC:读写PROFIBUS-DP相关内容。
1.1.2使用以太网方式连接的相关设定
FOCAS 通过以太网方式连接电脑和 CNC 系统时,使用 TCP/IP 通讯协议。在 CNC 上通常使用 FANUC 以太网板,或者 FANUC 快速以太网板。对于 16i/18i/21i 系列或者 30i/31i/32i系列,还可以使用内嵌以太网功能。
使用 FOCAS 通讯时,可以按照以下步骤进行设定:
设定电脑 ip,网上邻居 -》 本地连接 -》 Internet 协议(TCP/IP)。
2. 在 CNC 上设定以太网功能或者内嵌以太网功能相关参数,MDI 上 system 键 -》“向右” 扩展键 -》 “ETHPRM”软键 -》 “(操作)”软键 -》 “板卡”软键
在这个画面设定端口号(TCP)8193,时间间隔10。
3 。 使用网线连接电脑和 CNC。一般使用交叉线,如果通过集线器、交换机等设备,则使用直通线。
1.1.3详细开发流程
准备工作:FOCAS2开发包(包含Fwlib32.dll等需要用到的dll);
VisualStudio 2017;
FOCAS说明文档(所有机床相关数据函数调用方法 )
FOCAS_Api_Help;(以XML文件形式提供一些接口上的帮助)
2、开发流程
(1)连接方式:采用以太网连接,实验采用的CNC的IP地址为192.168.0.1,端口号为8193,PC侧IP只要配在同一个局域网即可,实验用的PC机的IP为192.168.0.10。IP的配置方法这里不再赘述。
(2)PC端工程搭建操作:使用visual studio 2017新建一个C# Windows窗体应用程序,如下图:

然后进入工程文件,部署FOCAS文件,如下图所示:

如上图所示,首先将将fwlib32.cs文件添加至工程文件,该文件在FOCAS2_LibrariesFwlibDot NET sample路径下。然后在你新建的项目的binDebug目录下将要用到的动态链接库全部考进去。如下图所示,所用到的dll在FOCAS2_Libraries下的Fwlib文件夹中,直接全部拷到工程目录下即可。
做完以上的所有准备工作后就可以正式开始开发了。
3、API函数的使用方法:API具体的函数调用方法可以参见FOCAS说明文档,如下图所示:
这里只对一些常用的API函数进行介绍。
与CNC建立连接:参考FOCAS说明文档中的Function related to library handle, node文件夹中的Function Reference related to library handle, node_cnc_allclibhndl3.doc.在测试与机床连接函数时,要首先建立机床与PC机的物理连接,保证他们之间能够ping通,具体方法这里不再赘述。参考代码如下:
private void btnConc_Click(object sender, EventArgs e)
{
string ip = txtIp.Text;
string port = txtPort.Text;
string timeout = txtTimeOut.Text;
int ret = Fanuc.cnc_allclibhndl3(ip, Convert.ToUInt16(port), Convert.ToInt32(timeout), out Fanuc.h);
if (ret == Fanuc.EW_OK)
{
//“函数方法””
}
与CNC断开连接:参考FOCAS说明文档中的Function related to library handle, node文件夹中的Function Reference related to library handle, node_cnc_freelibhndl.doc,具体代码如下:
private void btnDisConn_Click(object sender, EventArgs e)
{
int ret = Fanuc.cnc_freelibhndl(Fanuc.h);
if (ret == Fanuc.EW_OK)
{
MessageBox.Show(“与机床断开连接”);
}
else
{
MessageBox.Show(ret + “”);
}
}
采集坐标信息:我们需要参考FOCAS说明文档:
Fanuc.ODBPOS fos = new Focas1.ODBPOS();
public void get_postion()//获取位置信息
{
short num = Fanuc.MAX_AXIS;
short type = -1;
short ret = Fanuc.cnc_rdposition(Fanuc.h, type, ref num, fos);
if (ret == 0)
{
//相对坐标
label12.Text = fos.p1.rel.name.ToString();
label13.Text = fos.p2.rel.name.ToString();
//label14.Text = fos.p3.rel.name.ToString();
label15.Text = fos.p4.rel.name.ToString();
label16.Text = fos.p5.rel.name.ToString();
X_Relative.Text = Convert.ToString(fos.p1.rel.data * Math.Pow(10, -fos.p1.rel.dec));
Z_Relative.Text = Convert.ToString(fos.p2.rel.data * Math.Pow(10, -fos.p2.rel.dec));
//textBox10.Text = Convert.ToString(fos.p3.rel.data * Math.Pow(10, -fos.p3.rel.dec));
C_Relative.Text = Convert.ToString(fos.p4.rel.data * Math.Pow(10, -fos.p4.rel.dec));
V_Relative.Text = Convert.ToString(fos.p5.rel.data * Math.Pow(10, -fos.p5.rel.dec));
//绝对坐标
label21.Text = fos.p1.abs.name.ToString();
label20.Text = fos.p2.abs.name.ToString();
label18.Text = fos.p4.abs.name.ToString();
label17.Text = fos.p5.abs.name.ToString();
X_Absolute.Text = Convert.ToString(fos.p1.abs.data * Math.Pow(10, -fos.p1.abs.dec));
Z_Absolute.Text = Convert.ToString(fos.p2.abs.data * Math.Pow(10, -fos.p2.abs.dec));
C_Absolute.Text = Convert.ToString(fos.p4.abs.data * Math.Pow(10, -fos.p4.abs.dec));
V_Absolute.Text = Convert.ToString(fos.p5.abs.data * Math.Pow(10, -fos.p5.abs.dec));
//机器坐标
label26.Text = fos.p1.mach.name.ToString();
label25.Text = fos.p2.mach.name.ToString();
//label24.Text = fos.p3.mach.name.ToString();
label23.Text = fos.p4.mach.name.ToString();
label22.Text = fos.p5.mach.name.ToString();
X_Machine.Text = Convert.ToString(fos.p1.mach.data * Math.Pow(10, -fos.p1.mach.dec));
Z_Machine.Text = Convert.ToString(fos.p2.mach.data * Math.Pow(10, -fos.p2.mach.dec));
C_Machine.Text = Convert.ToString(fos.p4.mach.data * Math.Pow(10, -fos.p4.mach.dec));
V_Machine.Text = Convert.ToString(fos.p5.mach.data * Math.Pow(10, -fos.p5.mach.dec));
//剩余移动距离
label31.Text = fos.p1.dist.name.ToString();
label30.Text = fos.p2.dist.name.ToString();
label28.Text = fos.p4.dist.name.ToString();
label27.Text = fos.p5.dist.name.ToString();
X_DistanceToGo.Text = Convert.ToString(fos.p1.dist.data * Math.Pow(10, -fos.p1.dist.dec));
Z_DistanceToGo.Text = Convert.ToString(fos.p2.dist.data * Math.Pow(10, -fos.p2.dist.dec));
C_DistanceToGo.Text = Convert.ToString(fos.p4.dist.data * Math.Pow(10, -fos.p4.dist.dec));
V_DistanceToGo.Text = Convert.ToString(fos.p5.dist.data * Math.Pow(10, -fos.p5.dist.dec));
}
}
采集主轴转速:我们需要参考说明文档的Function related to controlled axis&spindle_cnc_acts.doc.以下为采集主轴转速的函数参考:
采 Fanuc.ODBACT pindle = new Focas1.ODBACT();
public void get_pindle()//获取主轴的转速
{
short num = 32;
short ret = Fanuc.cnc_acts(Fanuc.h, pindle);
if (ret == 0)
{
SpindleSpeed.Text = pindle.data.ToString();
}
}集主轴、伺服轴的负载:参考说明文档:
Function related to controlled axis&spindle_cnc_rdspmeter.doc
Function related to controlled axis&spindle_cnc_rdsvmeter.doc.参考代码如下:
Fanuc.ODBSVLOAD sv = new Focas1.ODBSVLOAD();
Fanuc.ODBSPLOAD sp = new Focas1.ODBSPLOAD();
public void get_load()//主,伺服轴的加载计//测试成功
{
short a = 6;//伺服轴的数量
short ret = Fanuc.cnc_rdsvmeter(Fanuc.h, ref a, sv);
short ret2 = Fanuc.cnc_rdspmeter(Fanuc.h, 1, ref a, sp);
if (ret == 0 && ret2 == 0)
{
SpindleLoad.Text =Convert.ToString(sp.spload1.spload.data);
sv1_Load.Text = Convert.ToString(sv.svload1.data); //伺服轴1负载
sv2_Load.Text = Convert.ToString(sv.svload2.data); //伺服轴2负载
sv3_Load.Text = Convert.ToString(sv.svload3.data); //伺服轴3负载
sv4_Load.Text = Convert.ToString(sv.svload4.data); //伺服轴4负载
}
采集主轴名称:参考说明文档的
Function related to controlled axis&spindle_cnc_rdspdlname.doc。参考代码如下:
//获取主轴名称
Fanuc.ODBEXAXISNAME spindlename = new Focas1.ODBEXAXISNAME();
public void get_spindlename()
{
short data_num = 32;
short ret = Focas1.cnc_exaxisname(Fanuc.h,1,ref data_num, spindlename);
if(ret==0)
{
Spindle_Name.Text = spindlename.axname1;
}
采集实际进给速度:参考说明文档的
Function related to controlled axis&spindle_cnc_actf.doc。参考代码如下:
Focas1.ODBACT odbact = new Focas1.ODBACT();
public void get_actfeed() {
short ret = Focas1.cnc_actf(Fanuc.h,odbact);
if (ret == 0)
{
RelFeedRate.Text = Convert.ToString(odbact.data);
}
}
获取机床的状态:参考说明文档的 Function related to others_cnc_statinfo.doc。参考代码如下:
//机床状态
Fanuc.ODBST obst = new Focas1.ODBST();
public void get_state()//获取机器的状态
{
Fanuc.cnc_statinfo(Fanuc.h, obst);
cnc_status.Text = Convert.ToString(obst.run);//0停止,1待机,开动
Alarm_Status.Text = Convert.ToString(obst.alarm);//0没有警报,1表示有警报
RunningMode.Text = Convert.ToString(obst.tmmode);
}
获取主程序号、正在运行的程序号:参考说明文档的
Function related to CNC program_cnc_rdprgnum.doc。参考代码如下:
Fanuc.ODBPRO pro = new Fanuc.ODBPRO();
public void get_program()
{
short ret = Focas1.cnc_rdprgnum(Fanuc.h, pro);
if (ret == 0)
{
CurrentRunningProgramNumber.Text = Convert.ToString(pro.data);
MainProgramNumber.Text = Convert.ToString(pro.mdata);
//}
}
获取报警类型:参考说明文档的Function related to others_cnc_alarm2.doc。参考代码如下:
获取报警类型
public void get_alarmtype() {
int alarm = 0;
short ret = Focas1.cnc_alarm2(Fanuc.h,out alarm);
if (ret == 0)
{
switch (alarm)
{
case 0:
listBox3.Items.Add(“Parameter switch on (SW)”);
Global.AlarmType = “Parameter switch on (SW)”;
break;
case 1:
listBox3.Items.Add(“Power off parameter set (PW)”);
Global.AlarmType = “Power off parameter set (PW)”;
break;
case 2:
listBox3.Items.Add(“I/O error (IO)”);
Global.AlarmType = “I/O error (IO)”;
break;
case 3:
listBox3.Items.Add(“Foreground P/S (PS)”);
Global.AlarmType = “Foreground P/S (PS)”;
break;
case 4:
listBox3.Items.Add(“Overtravel,External data”);
Global.AlarmType = “Overtravel,External data”;
break;
case 5:
listBox3.Items.Add(“Overheat alarm”);
Global.AlarmType = “Overheat alarm”;
break;
case 6:
listBox3.Items.Add(“Servo alarm”);
Global.AlarmType = “Servo alarm”;
break;
case 8:
listBox3.Items.Add(“Data I/O error”);
Global.AlarmType = “Data I/O error”;
break;
case 9:
listBox3.Items.Add(“Spindle alarm”);
Global.AlarmType = “Spindle alarm”;
break;
case 10:
listBox3.Items.Add(“Other alarm(DS)”);
Global.AlarmType = “Other alarm(DS)”;
break;
case 11:
listBox3.Items.Add(“Alarm concerning Malfunction prevent functions (IE)”);
Global.AlarmType = “Alarm concerning Malfunction prevent functions (IE)”;
break;
case 12:
listBox3.Items.Add(“Background P/S (BG)”);
Global.AlarmType = “Background P/S (BG)”;
break;
case 13:
listBox3.Items.Add(“Syncronized error (SN)”);
Global.AlarmType = “Syncronized error (SN)”;
break;
case 14:
listBox3.Items.Add(“reserved”);
Global.AlarmType = “reserved”;
break;
case 15:
listBox3.Items.Add(“External alarm message”);
Global.AlarmType = “External alarm message”;
break;
case 16:
listBox3.Items.Add(“reserved”);
Global.AlarmType = “reserved”;
break;
case 17:
listBox3.Items.Add(“reserved”);
Global.AlarmType = “reserved”;
break;
case 18:
listBox3.Items.Add(“reserved”);
Global.AlarmType = “reserved”;
break;
case 19:
listBox3.Items.Add(“PMC error (PC)”);
Global.AlarmType = “PMC error (PC)”;
break;
default:
listBox3.Items.Add(“No Alarm”);
Global.AlarmType = “No Alarm”;
break;
}
}
}
获取报警类型:参考说明文档的Function related to others_cnc_rdalmmsg2.doc。参考代码如下:
Fanuc.ODBALMMSG2 msg = new Focas1.ODBALMMSG2();
public void get_message()
{
short b = 8;
short ret = Fanuc.cnc_rdalmmsg2(Fanuc.h, -1, ref b, msg);
string str1 = “msg”;
System.Type type = msg.GetType();
if (ret == 0)
{
for (int i = 1; i 《 3; i++)
{
str1 = “msg” + i;
object obj = type.GetField(str1).GetValue(msg);
System.Type type1 = obj.GetType();
AlarmNumber.Text = Convert.ToString(type1.GetField(“alm_no”).GetValue(obj));
listBox4.Items.Add(type1.GetField(“alm_msg”).GetValue(obj).ToString());
Global.AlarmMessage = type1.GetField(“alm_msg”).GetValue(obj).ToString();
}
}
}
获取循环时间:这个API采FOCAS说明文档中没有找到,但是在XML所提供的API Help中有介绍,这里我参考api help的介绍和对机床的一些基本了解写了一下采集循环时间的函数,可供参考,代码如下:
public void get_circleTime()
{
Fanuc.IODBPSD_1 param6757 = new Fanuc.IODBPSD_1();
Fanuc.IODBPSD_1 param6758 = new Fanuc.IODBPSD_1();
short ret = Fanuc.cnc_rdparam(Fanuc.h, 6757, 0, 8, param6757);
if (ret == 0)
{
int circlingTimeSec = param6757.ldata / 1000;
ret = Fanuc.cnc_rdparam(Fanuc.h, 6758, 0, 8, param6758);
if (ret == 0)
{
int circlingTimeMin = param6758.ldata;
int workingTime = circlingTimeMin * 60 + circlingTimeSec;
CirclingTime.Text = Convert.ToString(workingTime) + “秒”;
}
}
}
这里需要注意的是Fanuc.cnc_rdparam这个函数中的第二个参数要明白其含义,它代表的是机床PARAMETER参数表的序号,如下图所示,编号6757和6758表示的是循环时间,其中6757存储的值单位是ms,6758存储的值单位是min。
1.1 Fanuc数控系统机床数据采集方法
以下介绍的为带有以太网接口的Fanuc数控系统的数据采集方法,如果不带有以太网接口,需要采用串口通讯进行采集。
1.1.1 FOCAS简介和基本功能
采集Fanuc系列的机床数据,我们需要用到FOCAS1/2开发包,FOCAS是FANUC Open CNC API Specifications version 1 or 2的缩写,FOCAS1主要应用于0i和16i/18i/21i/系列,FOCAS2则针对30i/31i/32i系列CNC。
CNC/PMC数据窗口功能可以通过HSSB或以太网(TCP/IP)接口在PC和CNC之间完成交换数据和信息共享,他的主要功能包括以下几部分:
1:CNC:NC控制的伺服轴、主轴相关数据的读写。
包括绝对坐标、相对坐标、机床坐标、剩余移动量以及实际进给速度等。
2:CNC:加工程序的相关操作。
这些操作包括NC程序的上传/下载、程序校检、查找以及删除。读取CNC程序目录以及通过电脑实现CNC加工。
3:CNC:读写CNC文件数据。
这些数据包括刀具偏置、工件坐标系偏置、参数、设定、用户宏程序变量、P-Code宏程序变量以及螺距误差补偿数值。
4:CNC:读写刀具寿命管理信息。
5:CNC:读取历史信息记录。
这些信息包括操作历史记录和报警历史记录。
6:CNC:读取伺服、主轴数据。
7:CNC:读写数据服务器、DNC1、DNC2、OSI-Ethernet(只能使用HSSB)相关信息。
8:CNC:读写波形诊断数据。
9:CNC:读写冲床CNC数据。
10:CNC:读写激光器CNC数据。
11:CNC:读写伺服学习控制相关数据(只能使用HSSB)。
12:CNC:读写其他数据。
13:PMC:读写PMC相关数据。
这些数据包括G、F、Y、X、A、R、T、C、D地址等。
14:PMC:读写PROFIBUS-DP相关内容。
1.1.2使用以太网方式连接的相关设定
FOCAS 通过以太网方式连接电脑和 CNC 系统时,使用 TCP/IP 通讯协议。在 CNC 上通常使用 FANUC 以太网板,或者 FANUC 快速以太网板。对于 16i/18i/21i 系列或者 30i/31i/32i系列,还可以使用内嵌以太网功能。
使用 FOCAS 通讯时,可以按照以下步骤进行设定:
设定电脑 ip,网上邻居 -》 本地连接 -》 Internet 协议(TCP/IP)。
2. 在 CNC 上设定以太网功能或者内嵌以太网功能相关参数,MDI 上 system 键 -》“向右” 扩展键 -》 “ETHPRM”软键 -》 “(操作)”软键 -》 “板卡”软键
在这个画面设定端口号(TCP)8193,时间间隔10。
3 。 使用网线连接电脑和 CNC。一般使用交叉线,如果通过集线器、交换机等设备,则使用直通线。
1.1.3详细开发流程
准备工作:FOCAS2开发包(包含Fwlib32.dll等需要用到的dll);
VisualStudio 2017;
FOCAS说明文档(所有机床相关数据函数调用方法 )
FOCAS_Api_Help;(以XML文件形式提供一些接口上的帮助)
2、开发流程
(1)连接方式:采用以太网连接,实验采用的CNC的IP地址为192.168.0.1,端口号为8193,PC侧IP只要配在同一个局域网即可,实验用的PC机的IP为192.168.0.10。IP的配置方法这里不再赘述。
(2)PC端工程搭建操作:使用visual studio 2017新建一个C# Windows窗体应用程序,如下图:
然后进入工程文件,部署FOCAS文件,如下图所示:
如上图所示,首先将将fwlib32.cs文件添加至工程文件,该文件在FOCAS2_LibrariesFwlibDot NET sample路径下。然后在你新建的项目的binDebug目录下将要用到的动态链接库全部考进去。如下图所示,所用到的dll在FOCAS2_Libraries下的Fwlib文件夹中,直接全部拷到工程目录下即可。
做完以上的所有准备工作后就可以正式开始开发了。
3、API函数的使用方法:API具体的函数调用方法可以参见FOCAS说明文档,如下图所示:
这里只对一些常用的API函数进行介绍。
与CNC建立连接:参考FOCAS说明文档中的Function related to library handle, node文件夹中的Function Reference related to library handle, node_cnc_allclibhndl3.doc.在测试与机床连接函数时,要首先建立机床与PC机的物理连接,保证他们之间能够ping通,具体方法这里不再赘述。参考代码如下:
private void btnConc_Click(object sender, EventArgs e)
{
string ip = txtIp.Text;
string port = txtPort.Text;
string timeout = txtTimeOut.Text;
int ret = Fanuc.cnc_allclibhndl3(ip, Convert.ToUInt16(port), Convert.ToInt32(timeout), out Fanuc.h);
if (ret == Fanuc.EW_OK)
{
//“函数方法””
}
与CNC断开连接:参考FOCAS说明文档中的Function related to library handle, node文件夹中的Function Reference related to library handle, node_cnc_freelibhndl.doc,具体代码如下:
private void btnDisConn_Click(object sender, EventArgs e)
{
int ret = Fanuc.cnc_freelibhndl(Fanuc.h);
if (ret == Fanuc.EW_OK)
{
MessageBox.Show(“与机床断开连接”);
}
else
{
MessageBox.Show(ret + “”);
}
}
采集坐标信息:我们需要参考FOCAS说明文档:
Fanuc.ODBPOS fos = new Focas1.ODBPOS();
public void get_postion()//获取位置信息
{
short num = Fanuc.MAX_AXIS;
short type = -1;
short ret = Fanuc.cnc_rdposition(Fanuc.h, type, ref num, fos);
if (ret == 0)
{
//相对坐标
label12.Text = fos.p1.rel.name.ToString();
label13.Text = fos.p2.rel.name.ToString();
//label14.Text = fos.p3.rel.name.ToString();
label15.Text = fos.p4.rel.name.ToString();
label16.Text = fos.p5.rel.name.ToString();
X_Relative.Text = Convert.ToString(fos.p1.rel.data * Math.Pow(10, -fos.p1.rel.dec));
Z_Relative.Text = Convert.ToString(fos.p2.rel.data * Math.Pow(10, -fos.p2.rel.dec));
//textBox10.Text = Convert.ToString(fos.p3.rel.data * Math.Pow(10, -fos.p3.rel.dec));
C_Relative.Text = Convert.ToString(fos.p4.rel.data * Math.Pow(10, -fos.p4.rel.dec));
V_Relative.Text = Convert.ToString(fos.p5.rel.data * Math.Pow(10, -fos.p5.rel.dec));
//绝对坐标
label21.Text = fos.p1.abs.name.ToString();
label20.Text = fos.p2.abs.name.ToString();
label18.Text = fos.p4.abs.name.ToString();
label17.Text = fos.p5.abs.name.ToString();
X_Absolute.Text = Convert.ToString(fos.p1.abs.data * Math.Pow(10, -fos.p1.abs.dec));
Z_Absolute.Text = Convert.ToString(fos.p2.abs.data * Math.Pow(10, -fos.p2.abs.dec));
C_Absolute.Text = Convert.ToString(fos.p4.abs.data * Math.Pow(10, -fos.p4.abs.dec));
V_Absolute.Text = Convert.ToString(fos.p5.abs.data * Math.Pow(10, -fos.p5.abs.dec));
//机器坐标
label26.Text = fos.p1.mach.name.ToString();
label25.Text = fos.p2.mach.name.ToString();
//label24.Text = fos.p3.mach.name.ToString();
label23.Text = fos.p4.mach.name.ToString();
label22.Text = fos.p5.mach.name.ToString();
X_Machine.Text = Convert.ToString(fos.p1.mach.data * Math.Pow(10, -fos.p1.mach.dec));
Z_Machine.Text = Convert.ToString(fos.p2.mach.data * Math.Pow(10, -fos.p2.mach.dec));
C_Machine.Text = Convert.ToString(fos.p4.mach.data * Math.Pow(10, -fos.p4.mach.dec));
V_Machine.Text = Convert.ToString(fos.p5.mach.data * Math.Pow(10, -fos.p5.mach.dec));
//剩余移动距离
label31.Text = fos.p1.dist.name.ToString();
label30.Text = fos.p2.dist.name.ToString();
label28.Text = fos.p4.dist.name.ToString();
label27.Text = fos.p5.dist.name.ToString();
X_DistanceToGo.Text = Convert.ToString(fos.p1.dist.data * Math.Pow(10, -fos.p1.dist.dec));
Z_DistanceToGo.Text = Convert.ToString(fos.p2.dist.data * Math.Pow(10, -fos.p2.dist.dec));
C_DistanceToGo.Text = Convert.ToString(fos.p4.dist.data * Math.Pow(10, -fos.p4.dist.dec));
V_DistanceToGo.Text = Convert.ToString(fos.p5.dist.data * Math.Pow(10, -fos.p5.dist.dec));
}
}
采集主轴转速:我们需要参考说明文档的Function related to controlled axis&spindle_cnc_acts.doc.以下为采集主轴转速的函数参考:
采 Fanuc.ODBACT pindle = new Focas1.ODBACT();
public void get_pindle()//获取主轴的转速
{
short num = 32;
short ret = Fanuc.cnc_acts(Fanuc.h, pindle);
if (ret == 0)
{
SpindleSpeed.Text = pindle.data.ToString();
}
}集主轴、伺服轴的负载:参考说明文档:
Function related to controlled axis&spindle_cnc_rdspmeter.doc
Function related to controlled axis&spindle_cnc_rdsvmeter.doc.参考代码如下:
Fanuc.ODBSVLOAD sv = new Focas1.ODBSVLOAD();
Fanuc.ODBSPLOAD sp = new Focas1.ODBSPLOAD();
public void get_load()//主,伺服轴的加载计//测试成功
{
short a = 6;//伺服轴的数量
short ret = Fanuc.cnc_rdsvmeter(Fanuc.h, ref a, sv);
short ret2 = Fanuc.cnc_rdspmeter(Fanuc.h, 1, ref a, sp);
if (ret == 0 && ret2 == 0)
{
SpindleLoad.Text =Convert.ToString(sp.spload1.spload.data);
sv1_Load.Text = Convert.ToString(sv.svload1.data); //伺服轴1负载
sv2_Load.Text = Convert.ToString(sv.svload2.data); //伺服轴2负载
sv3_Load.Text = Convert.ToString(sv.svload3.data); //伺服轴3负载
sv4_Load.Text = Convert.ToString(sv.svload4.data); //伺服轴4负载
}
采集主轴名称:参考说明文档的
Function related to controlled axis&spindle_cnc_rdspdlname.doc。参考代码如下:
//获取主轴名称
Fanuc.ODBEXAXISNAME spindlename = new Focas1.ODBEXAXISNAME();
public void get_spindlename()
{
short data_num = 32;
short ret = Focas1.cnc_exaxisname(Fanuc.h,1,ref data_num, spindlename);
if(ret==0)
{
Spindle_Name.Text = spindlename.axname1;
}
采集实际进给速度:参考说明文档的
Function related to controlled axis&spindle_cnc_actf.doc。参考代码如下:
Focas1.ODBACT odbact = new Focas1.ODBACT();
public void get_actfeed() {
short ret = Focas1.cnc_actf(Fanuc.h,odbact);
if (ret == 0)
{
RelFeedRate.Text = Convert.ToString(odbact.data);
}
}
获取机床的状态:参考说明文档的 Function related to others_cnc_statinfo.doc。参考代码如下:
//机床状态
Fanuc.ODBST obst = new Focas1.ODBST();
public void get_state()//获取机器的状态
{
Fanuc.cnc_statinfo(Fanuc.h, obst);
cnc_status.Text = Convert.ToString(obst.run);//0停止,1待机,开动
Alarm_Status.Text = Convert.ToString(obst.alarm);//0没有警报,1表示有警报
RunningMode.Text = Convert.ToString(obst.tmmode);
}
获取主程序号、正在运行的程序号:参考说明文档的
Function related to CNC program_cnc_rdprgnum.doc。参考代码如下:
Fanuc.ODBPRO pro = new Fanuc.ODBPRO();
public void get_program()
{
short ret = Focas1.cnc_rdprgnum(Fanuc.h, pro);
if (ret == 0)
{
CurrentRunningProgramNumber.Text = Convert.ToString(pro.data);
MainProgramNumber.Text = Convert.ToString(pro.mdata);
//}
}
获取报警类型:参考说明文档的Function related to others_cnc_alarm2.doc。参考代码如下:
获取报警类型
public void get_alarmtype() {
int alarm = 0;
short ret = Focas1.cnc_alarm2(Fanuc.h,out alarm);
if (ret == 0)
{
switch (alarm)
{
case 0:
listBox3.Items.Add(“Parameter switch on (SW)”);
Global.AlarmType = “Parameter switch on (SW)”;
break;
case 1:
listBox3.Items.Add(“Power off parameter set (PW)”);
Global.AlarmType = “Power off parameter set (PW)”;
break;
case 2:
listBox3.Items.Add(“I/O error (IO)”);
Global.AlarmType = “I/O error (IO)”;
break;
case 3:
listBox3.Items.Add(“Foreground P/S (PS)”);
Global.AlarmType = “Foreground P/S (PS)”;
break;
case 4:
listBox3.Items.Add(“Overtravel,External data”);
Global.AlarmType = “Overtravel,External data”;
break;
case 5:
listBox3.Items.Add(“Overheat alarm”);
Global.AlarmType = “Overheat alarm”;
break;
case 6:
listBox3.Items.Add(“Servo alarm”);
Global.AlarmType = “Servo alarm”;
break;
case 8:
listBox3.Items.Add(“Data I/O error”);
Global.AlarmType = “Data I/O error”;
break;
case 9:
listBox3.Items.Add(“Spindle alarm”);
Global.AlarmType = “Spindle alarm”;
break;
case 10:
listBox3.Items.Add(“Other alarm(DS)”);
Global.AlarmType = “Other alarm(DS)”;
break;
case 11:
listBox3.Items.Add(“Alarm concerning Malfunction prevent functions (IE)”);
Global.AlarmType = “Alarm concerning Malfunction prevent functions (IE)”;
break;
case 12:
listBox3.Items.Add(“Background P/S (BG)”);
Global.AlarmType = “Background P/S (BG)”;
break;
case 13:
listBox3.Items.Add(“Syncronized error (SN)”);
Global.AlarmType = “Syncronized error (SN)”;
break;
case 14:
listBox3.Items.Add(“reserved”);
Global.AlarmType = “reserved”;
break;
case 15:
listBox3.Items.Add(“External alarm message”);
Global.AlarmType = “External alarm message”;
break;
case 16:
listBox3.Items.Add(“reserved”);
Global.AlarmType = “reserved”;
break;
case 17:
listBox3.Items.Add(“reserved”);
Global.AlarmType = “reserved”;
break;
case 18:
listBox3.Items.Add(“reserved”);
Global.AlarmType = “reserved”;
break;
case 19:
listBox3.Items.Add(“PMC error (PC)”);
Global.AlarmType = “PMC error (PC)”;
break;
default:
listBox3.Items.Add(“No Alarm”);
Global.AlarmType = “No Alarm”;
break;
}
}
}
获取报警类型:参考说明文档的Function related to others_cnc_rdalmmsg2.doc。参考代码如下:
Fanuc.ODBALMMSG2 msg = new Focas1.ODBALMMSG2();
public void get_message()
{
short b = 8;
short ret = Fanuc.cnc_rdalmmsg2(Fanuc.h, -1, ref b, msg);
string str1 = “msg”;
System.Type type = msg.GetType();
if (ret == 0)
{
for (int i = 1; i 《 3; i++)
{
str1 = “msg” + i;
object obj = type.GetField(str1).GetValue(msg);
System.Type type1 = obj.GetType();
AlarmNumber.Text = Convert.ToString(type1.GetField(“alm_no”).GetValue(obj));
listBox4.Items.Add(type1.GetField(“alm_msg”).GetValue(obj).ToString());
Global.AlarmMessage = type1.GetField(“alm_msg”).GetValue(obj).ToString();
}
}
}
获取循环时间:这个API采FOCAS说明文档中没有找到,但是在XML所提供的API Help中有介绍,这里我参考api help的介绍和对机床的一些基本了解写了一下采集循环时间的函数,可供参考,代码如下:
public void get_circleTime()
{
Fanuc.IODBPSD_1 param6757 = new Fanuc.IODBPSD_1();
Fanuc.IODBPSD_1 param6758 = new Fanuc.IODBPSD_1();
short ret = Fanuc.cnc_rdparam(Fanuc.h, 6757, 0, 8, param6757);
if (ret == 0)
{
int circlingTimeSec = param6757.ldata / 1000;
ret = Fanuc.cnc_rdparam(Fanuc.h, 6758, 0, 8, param6758);
if (ret == 0)
{
int circlingTimeMin = param6758.ldata;
int workingTime = circlingTimeMin * 60 + circlingTimeSec;
CirclingTime.Text = Convert.ToString(workingTime) + “秒”;
}
}
}
这里需要注意的是Fanuc.cnc_rdparam这个函数中的第二个参数要明白其含义,它代表的是机床PARAMETER参数表的序号,如下图所示,编号6757和6758表示的是循环时间,其中6757存储的值单位是ms,6758存储的值单位是min。

 举报
举报




