开启该帖子的消息推送
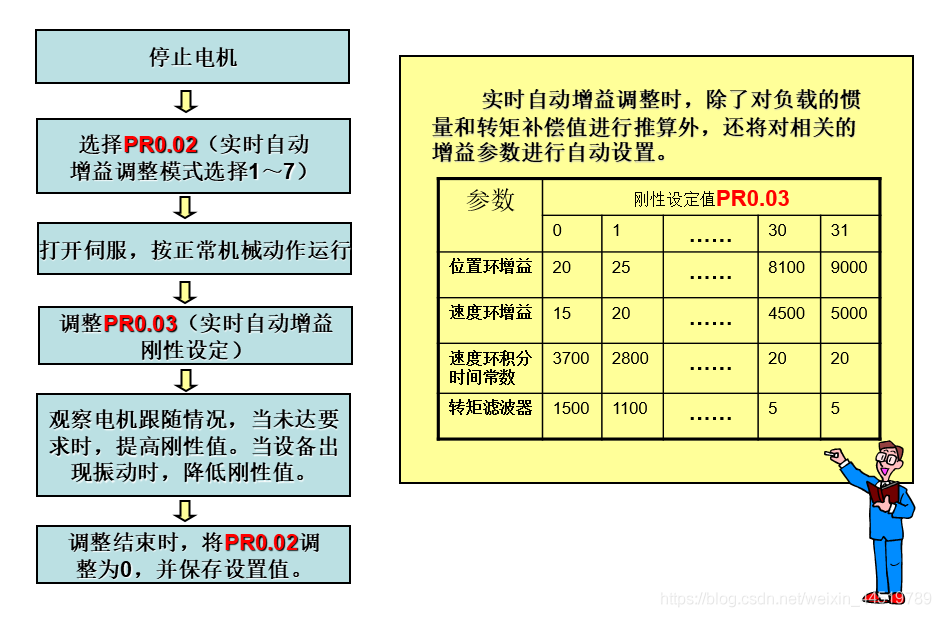
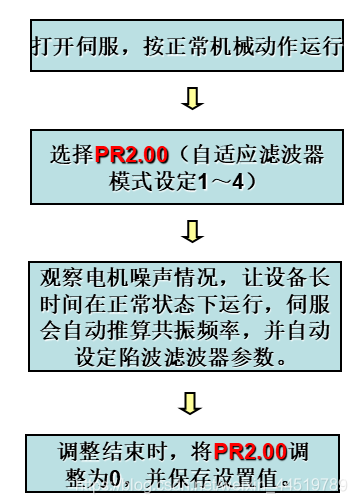
设备说明: 伺服驱动器:松下伺服驱动器A6-BE系列。 伺服电机:松下伺服电机。 应用场景:6自由度串联机器人(0.75kw-0.25kw) 、5自由度混联机器人(5kw-0.75kw) 下的伺服调试。
更多回帖
无需安装、支持浏览器和手机在线查看、实时共享
登录更多精彩功能!






 举报
举报



