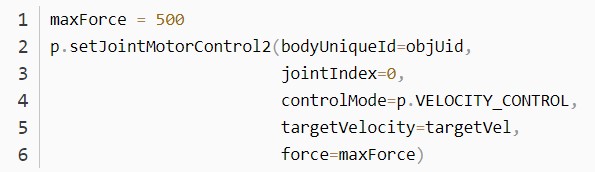
恒定速度
要让电机保持恒速运动,需要指定施加在电机的最大外力。如
一段完整的代码
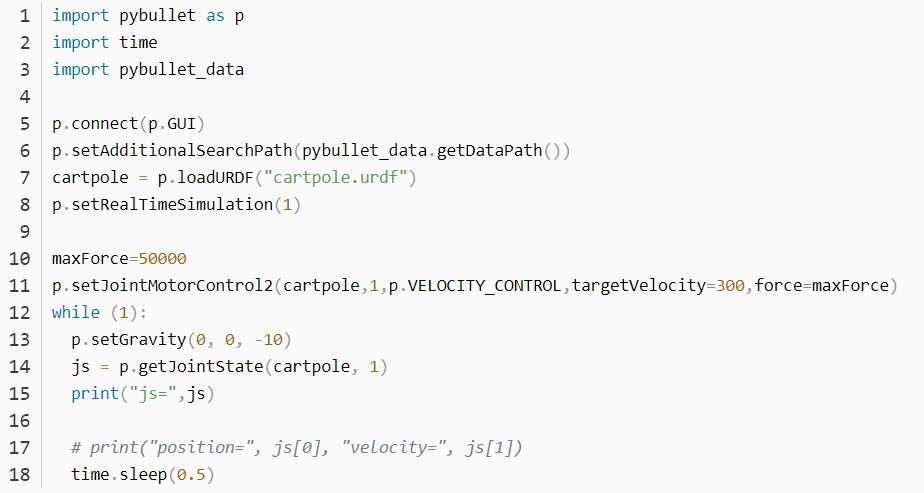
可以通过调整maxForce, targetVelocity, time.sleep等的参数来观察不同的效果,注意js输出的速度信息。参数中的targetVelocity并不是机构一定会达到的速度,只有当施加给电机的力足够时,才能达到。
位置控制
位置控制是最简单的控制方式,直接贴上一个例子。
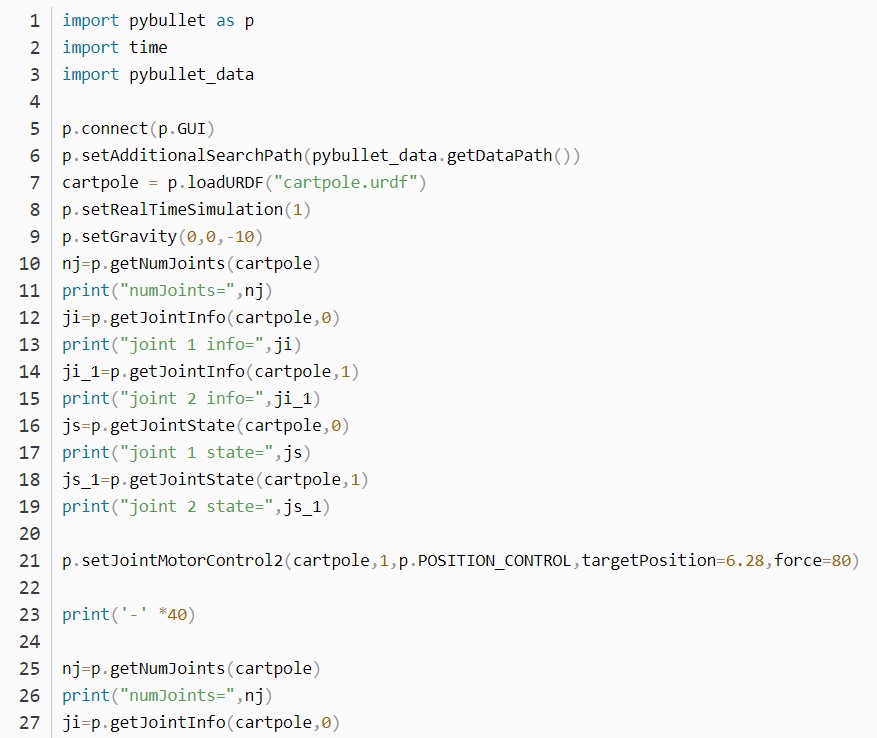

通过调整p.setJointMotorControl2(cartpole,1,p.POSITION_CONTROL,targetPosition=6.28,force=80)
里面的targetPosition和force参数可以实现不同的效果,具体的可以调参试一下。很有趣。
恒定速度
要让电机保持恒速运动,需要指定施加在电机的最大外力。如
一段完整的代码
可以通过调整maxForce, targetVelocity, time.sleep等的参数来观察不同的效果,注意js输出的速度信息。参数中的targetVelocity并不是机构一定会达到的速度,只有当施加给电机的力足够时,才能达到。
位置控制
位置控制是最简单的控制方式,直接贴上一个例子。
通过调整p.setJointMotorControl2(cartpole,1,p.POSITION_CONTROL,targetPosition=6.28,force=80)
里面的targetPosition和force参数可以实现不同的效果,具体的可以调参试一下。很有趣。

 举报
举报




