1.固有机械特性近似图
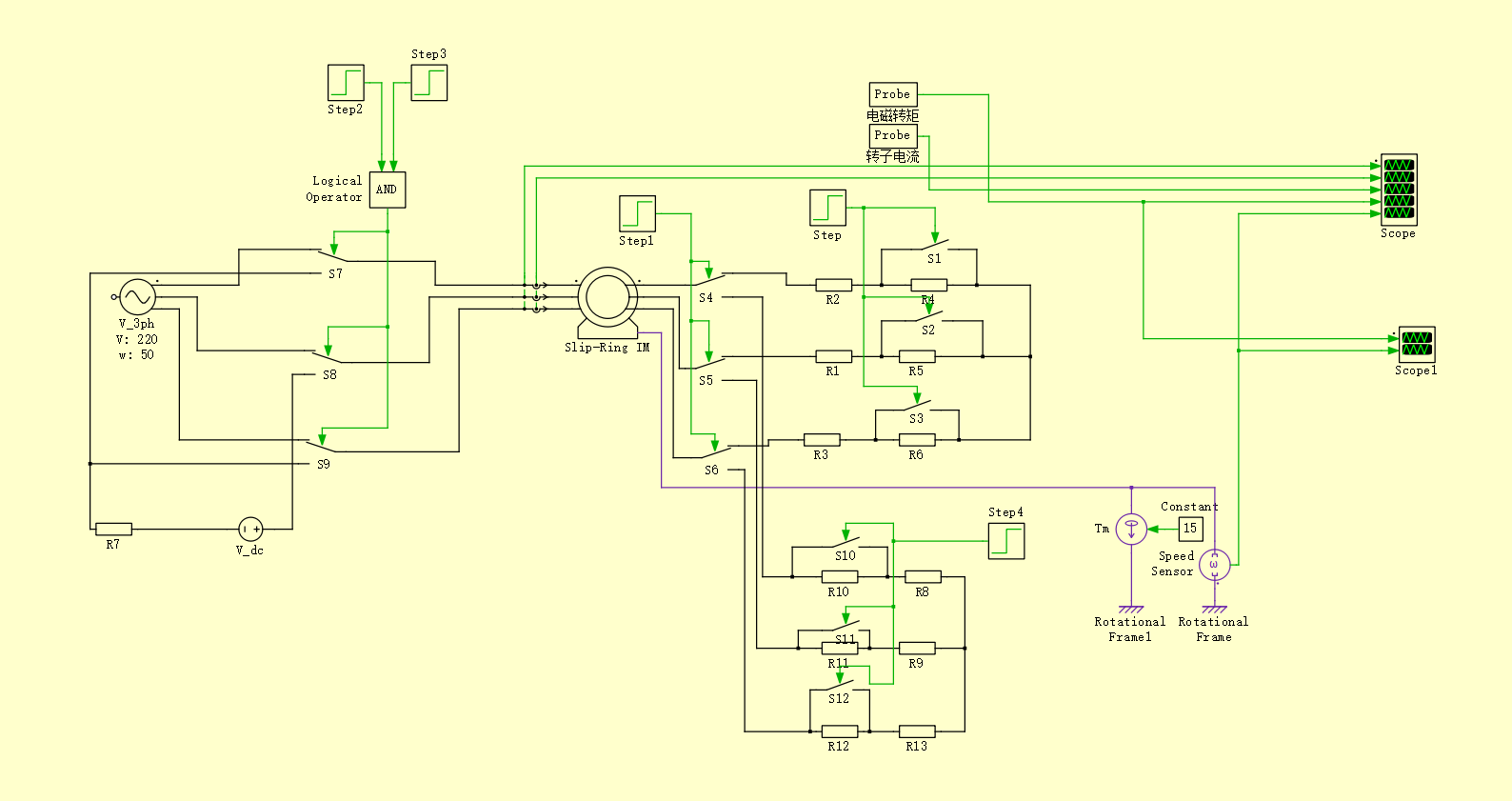
2.三相交流电机的控制系统
1)理论推导
第一次制动选择能耗制动,第二次制动选择倒拉制动。
2)模型搭建
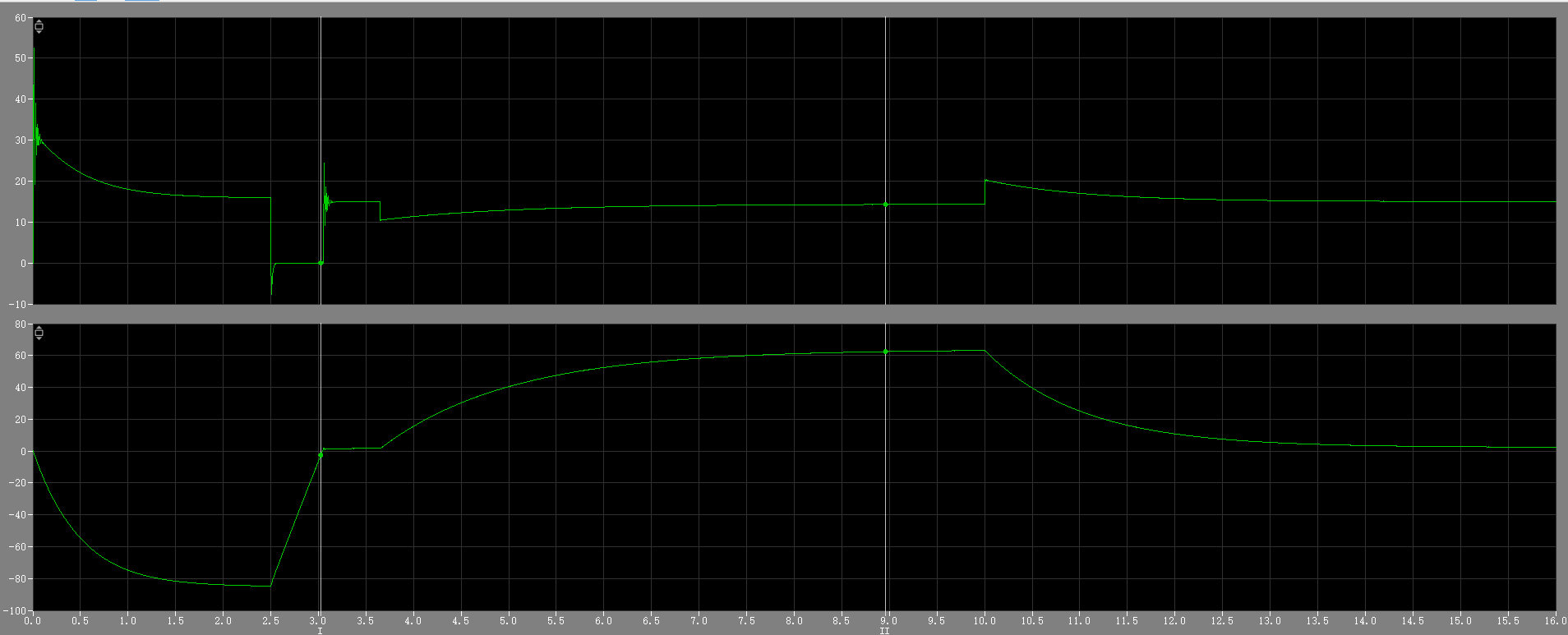
3)模拟仿真
3.心得体会和笔记总结
制动方式的选择主要是根据各个制动方式的优缺点和适用来选择的。异步电动机的电源反解制动准确停车有一定困难,容易造成反转,而且电池的损耗也比较大。反馈制动只能用在高于同步转速的时候。相比来说能耗制动是比较好的选择。第二次因为不能在使用能耗制动了,相比来说倒拉制动是一种简单有效的制动方式,尽管制动时间有些长。
设计控制系统时,主要考虑了,冲击转矩和冲击电流以及经济性,能耗可能会有点大了。
问题:
为什么我转速开始时是负的,而且连续两次都是一开始是负的,还希望老师能帮我看看是不是电路出了问题?还是怎么回事
几种控制电机分类:
步进电动机:具有快速启停,高精度,能够直接接受数字信号。
直流伺服电动机:通常用于功率稍大的系统中,基本结构和工作原理和普通直流他励电动机相同。
交流伺服电动机:与直流伺服电机相比较,交流伺服电动机不过是将定子与转子的位置做了交换。
无刷直流电动机:在结构上相当于一台反装式直流电动机,电枢放置在定子上,转子为永磁体。
正弦波永磁同步电动机:结构上与无刷直流电动机基本相同。
直流力矩电动机:工作原理和传统的直流伺服电动机相同
直线电动机:原理与旋转电动机基本相同。
1.固有机械特性近似图
2.三相交流电机的控制系统
1)理论推导
第一次制动选择能耗制动,第二次制动选择倒拉制动。
2)模型搭建
3)模拟仿真
3.心得体会和笔记总结
制动方式的选择主要是根据各个制动方式的优缺点和适用来选择的。异步电动机的电源反解制动准确停车有一定困难,容易造成反转,而且电池的损耗也比较大。反馈制动只能用在高于同步转速的时候。相比来说能耗制动是比较好的选择。第二次因为不能在使用能耗制动了,相比来说倒拉制动是一种简单有效的制动方式,尽管制动时间有些长。
设计控制系统时,主要考虑了,冲击转矩和冲击电流以及经济性,能耗可能会有点大了。
问题:
为什么我转速开始时是负的,而且连续两次都是一开始是负的,还希望老师能帮我看看是不是电路出了问题?还是怎么回事
几种控制电机分类:
步进电动机:具有快速启停,高精度,能够直接接受数字信号。
直流伺服电动机:通常用于功率稍大的系统中,基本结构和工作原理和普通直流他励电动机相同。
交流伺服电动机:与直流伺服电机相比较,交流伺服电动机不过是将定子与转子的位置做了交换。
无刷直流电动机:在结构上相当于一台反装式直流电动机,电枢放置在定子上,转子为永磁体。
正弦波永磁同步电动机:结构上与无刷直流电动机基本相同。
直流力矩电动机:工作原理和传统的直流伺服电动机相同
直线电动机:原理与旋转电动机基本相同。

 举报
举报




