CAN(Controller Area Network)为控制器局域网络,CAN总线规范已经被国际标准化组织制订为国际标准ISO11898,并得到众多半导体器件厂商的支持,推出各种集成有CAN协议的产品。CAN属于总线式串行通信网络,由于其采用了许多新技术和独特的设计,低成本、高可靠性、实时性、灵活性、抗干扰能力强等特点,已被广泛应用于各个自动化控制系统中。在汽车电子、自动控制、电力系统等领域,CAN总线具有无可比拟的优越性。
以太网以其通信数据量大、传输速度快、开放性好、成本低等优点,弥补了现场总线通信速率低的缺陷,成为现阶段信息网络应用最广的局域网技术。用以太网直接进入工业控制领域,目前还存在一些问题,以太网的媒体访问方式CSDA/CD不能保证网络传输的确定性和实时性,不能满足工业现场恶劣环境的要求。将以太网引入工业测控领域,通过与现场总线(CAN BUS)分工合作,构成两种异构网络结构,将高效的以太网和低速的现场总线相结合,解决大规模测控系统实时性和可靠性矛盾,提高整个系统的工作效率。两种异构网络的互连,需要用嵌入式网关实现。
CAN/Ethernet网关设计的主要任务是协议转换,要求数据解析正确完整,同时响应迅速、耗时低、实时性和安全性好。基于RISC架构的ARM微处理器指令执行效率高,软件操作平台易于建设,同时具备丰富的外围扩展电路,能满足实时多任务要求。使用ARM技术构造以太网与CAN现场总线协议转换网关是一种高效可行的方案。
1 网关硬件系统组成
网关的主要功能是进行以太网数据报文与CAN数据帧之间的协议转换,实现以太网与CAN总线的互联。系统的硬件组成包括CAN总线接口设计和以太网接口设计,如图1所示。
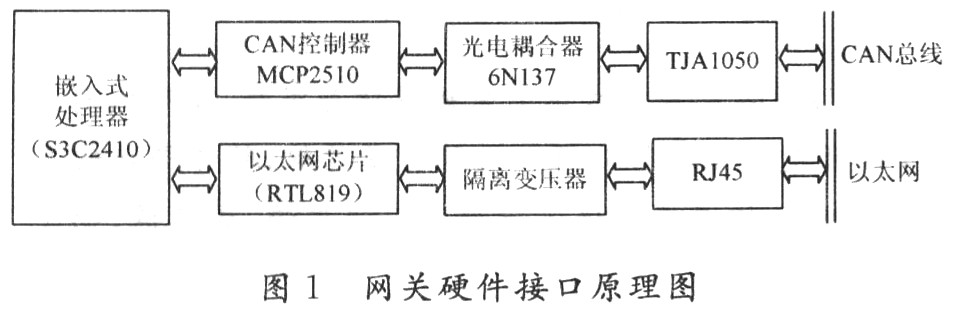
S3C2410是Samsung公司推出的一款低价位、低功耗、高性能的32位RISC嵌入式处理器。该芯片采用ARM920T内核,5级流水线和哈佛结构,工作频率高达266 MHz,运行速度可达1.1 MIPS。S3C2410提供了丰富的内部资源,如:SDRAM控制器、LCD控制器、3通道的UART、4通道的DMA、2个SPI模块,支持轮询、中断与DMA三种数据发送模式。虽然内部没有CAN控制器,但可以通过SPI接口进行扩展,接口电路简单,易于实现。
CAN总线接口电路主要采用带SPI接口的独立CAN控制器MCP2510、CAN总线收发器TJA1050、高速光隔6N137和DC/DC电源隔离模块DCR010505等设备组成。独立CAN控制器MCP2510完全支持CAN总线的V 2.0A和V 2.0B的技术规范。系统设计时,将MCP2510作为从设备连接到S3C2410的SPI0口。TJA1050总线收发器是CAN控制器和物理总线之间的接口芯片,增强了总线的驱动能力。为增强CAN总线节点的抗干扰能力,MCP2510的TXCAN和RXCON并不直接与TJA1050的TXD和RXD相连,而是通过两片光电耦合器6N137与TJA1050相连,同时光隔芯片的两端电源采用DC/DC模块进行隔离。这样就实现了系统外总线CAN节点间的完全电气隔离,增强了节点的稳定性和安全性。总线两端都接有1个终端电阻(120 Ω)和1个TVS管,以消除反射信号,有效提高系统的抗干扰能力。
以太网接口电路是在S3C2410片上扩展网络接口芯片RTL8019AS,RTL8019AS是***REALTEK公司生产的一种基于ISA总线的高度集成的以太网控制器。它实现了以太网媒介访问层(MAC)和物理层(PHY)的全部功能,包括MAC数据帧的收发、地址识别、循环冗余检验(Cyclic Redundancy Check,CRC)编码/校验、曼彻斯特编解码、超时重传、链路完整性测试、信号极性检测与纠正等。RTL8019AS与主处理器有3种接口模式,跳线模式(Jumper),即插即用模式(PnP)和免跳线模式(Jumperless)。系统采用常见的跳线模式来选择I/O端口和中断。
2 协议转换流程
当CAN总线上的设备向Ethernet网发送数据时,嵌入式网关将接收到的CAN数据包解析,提取数据域中的内容;然后按照TCP/IP协议进行封装,嵌入式网关将经过封装的数据发送给以太网控制芯片RTL8019AS。由RTL8019AS自动给这些数据添加以太网物理层和逻辑链路层所需的相关信息,通过物理接口传送到以太网。反之,当以太网向CAN总线上设备发送TCP/IP数据包时,它首先将数据发送到RTL8019AS,嵌入式网关从RTL8019AS中接收到数据后,提取实际要传送的数据,然后封装成CAN总线数据格式,通过CAN总线将数据发送到网络中的现场设备。
嵌入式网关硬件必须具有以太网接口和CAN总线接口,而软件要有TCP/1P协议栈和CAN总线驱动程序;通常嵌入式Linux内核中有完整的TCP/IP协议栈。由于REALTEK公司支持Linux的开发,Linux系统中已含有RTL8019AS芯片的通用驱动程序,CAN总线协议驱动并不是标准配置。因此,设计CAN总线接口及其编制驱动程序是实现嵌入式网关最主要的工作。
3 CAN驱动程序设计
Linux驱动程序属于Linux内核的一部分,是嵌入式系统控制硬件的接口,它为用户屏蔽设备的工作细节,并向用户提供透明访问硬件设备的机制。驱动程序的开发在嵌入式系统开发中具有举足轻重的地位。开发出稳定、完备的驱动程序可提高整个系统的性能。
3.1 CAN驱动程序流程
MCP2510的内部结构框图如图2所示。
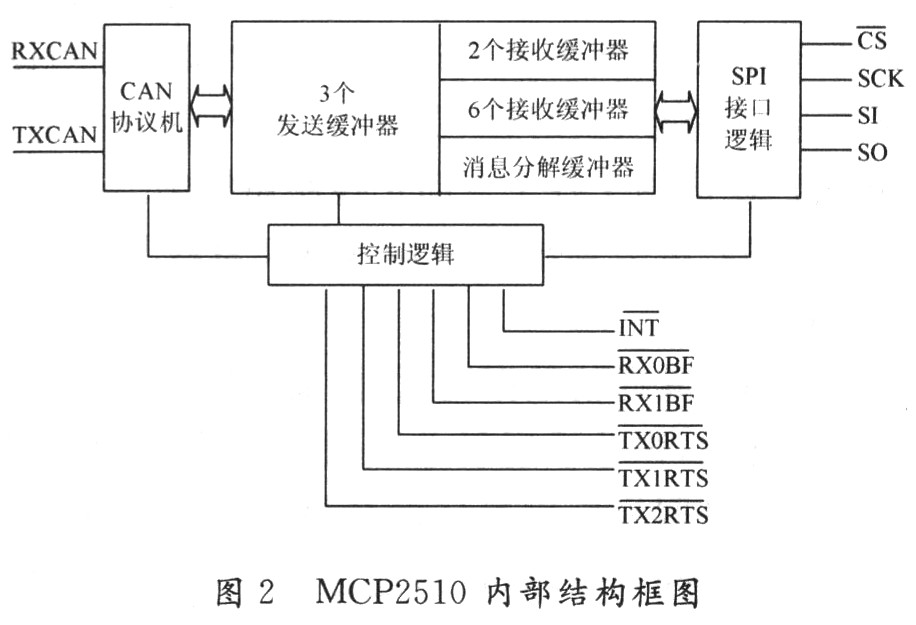
MCP2510内含3个发送缓冲器和2个接收缓冲器,同时还具有灵活的中断管理能力。CAN协议机负责与CAN总线的接口,SPI接口逻辑用于实现同MCU的通信,而寄存、缓冲器组与控制逻辑则用来完成各种方式的设定和操作控制。
在Linux多任务操作系统中,CAN总线通信程序的设计可分为发送数据模块、接收等待模块和中断处理模块实现。系统中CAN总线的数据发送和接收是两个不同的线程。在驱动程序中建立数据发送和接收缓冲区。中断处理程序只负责填充(或读取)缓冲区中的数据,然后唤醒等待接收(或发送)数据的任务。数据的发送与接收都通过独立的缓冲区,并由中断来实现。操作系统的中断响应时间在软件上决定了CAN总线数据的最快收发速度。
3.2 CAN设备驱动程序的实现要点
3.2.1 CAN设备驱动操作函数
CAN设备驱动程序最终提供给应用程序的是一个流控制接口,主要包括:open,realse,read,write,ioctl等操作。添加设备驱动程序,实际上就是给上述操作编写相应的程序代码。驱动程序加载到内核时,会首先运行驱动程序的初始化函数,然后等待系统调用在file_operations数据结构中定义的相关函数,实现对设备的操作。系统使用Linux 2.4.18版本,其文件系统接口被写义为:
s3c2410_mcp2510_open负责对将要进行的I/O操作做好必要的准备工作,主要包括限制CAN打开次数、清空3个发送缓冲区和2个接收缓冲区等。
s3c2410_mcp2510_write将要发送的数据通过SPI总线将数据传送MCP2510的发送缓冲器,再通过MCP2510将数据发送到CAN总线。
s3c2410_mcp2510_read用于将MCP2510从CAN总线上接收到接收缓冲器的数据,通过SPI总线读到用户区,并返回所读出的字节数。
s3c2410_mcp2510_ioctl用于控制CAN总线通信的波特率、设置帧ID、设置工作模式、设置设备滤波器等工作。
s3c2410_mcp2510_release用于释放所占用的内存、中断等资源。
3.2.2 CAN设备的初始化函数
CAN设备的初始化函数主要负责创建CAN设备的节点设备文件、注册CAN设备的中断处理函数、初始化MCP2510等工作。
在Linux系统中,初始化函数从s3c2410_mcp2510_init()开始。通过调用register_chrdev向系统注册字符型设备驱动程序;通过devfs_register()函数创建设备文件系统的CAN设备节点。同时,CAN设备驱动程序通过调用request_irq函数来申请中断,向系统注册CAN设备的CAN中断处理函数s3c2410_isr_mcp2510()。在实现了MCP2510的各个接口函数后,还需要编写MCP2510的模块加载函数module_init()和模块卸载函数module_exit(),用于向内核注册设备及注销设备。
3.2.3 驱动程序的加载与使用
Linux设备驱动会以内核模块的形式出现。Eth-ernet/CAN网关设备驱动程序作为内核的一部分,应在编译时把设备驱动程序编译成可加载的模块。当使用insmod命令加载内核模块时,模块的加载函数mod-ule_init(初始化函数名)会自动被内核执行,将初始化函数加入内核全局初始化函数列表中,在内核初始化时执行驱动的初始化函数,从而完成驱动的初始化和注册,之后驱动便停止等待,被应用程序调用。当用rm-mod命令卸载某内核模块时,模块的卸载函数module_exit(退出处理函数名)也会自动被内核执行,完成与模块加载函数相反的功能。当驱动程序加载到内核中后,就可将CAN设备文件进行open,read,write,release等操作。
4 结语
随着工业控制系统性能的提高,以太网在工业上的应用也会越来越广泛。在此详细介绍了一种嵌入式网关的设计与实现。作为连接以太网和现场总线的纽带,实现以太网与CAN现场总线之间的协议转换,为CAN/Ethernet的互联提供了一种传输速度快、成本低,稳定性和安全性高的解决方案。同时,利用嵌入式ARM处理器,接口资源丰富,设计通用性强,便于扩展其他现场总线与以太网的互联,具有较好的应用推广价值。
CAN(Controller Area Network)为控制器局域网络,CAN总线规范已经被国际标准化组织制订为国际标准ISO11898,并得到众多半导体器件厂商的支持,推出各种集成有CAN协议的产品。CAN属于总线式串行通信网络,由于其采用了许多新技术和独特的设计,低成本、高可靠性、实时性、灵活性、抗干扰能力强等特点,已被广泛应用于各个自动化控制系统中。在汽车电子、自动控制、电力系统等领域,CAN总线具有无可比拟的优越性。
以太网以其通信数据量大、传输速度快、开放性好、成本低等优点,弥补了现场总线通信速率低的缺陷,成为现阶段信息网络应用最广的局域网技术。用以太网直接进入工业控制领域,目前还存在一些问题,以太网的媒体访问方式CSDA/CD不能保证网络传输的确定性和实时性,不能满足工业现场恶劣环境的要求。将以太网引入工业测控领域,通过与现场总线(CAN BUS)分工合作,构成两种异构网络结构,将高效的以太网和低速的现场总线相结合,解决大规模测控系统实时性和可靠性矛盾,提高整个系统的工作效率。两种异构网络的互连,需要用嵌入式网关实现。
CAN/Ethernet网关设计的主要任务是协议转换,要求数据解析正确完整,同时响应迅速、耗时低、实时性和安全性好。基于RISC架构的ARM微处理器指令执行效率高,软件操作平台易于建设,同时具备丰富的外围扩展电路,能满足实时多任务要求。使用ARM技术构造以太网与CAN现场总线协议转换网关是一种高效可行的方案。
1 网关硬件系统组成
网关的主要功能是进行以太网数据报文与CAN数据帧之间的协议转换,实现以太网与CAN总线的互联。系统的硬件组成包括CAN总线接口设计和以太网接口设计,如图1所示。
S3C2410是Samsung公司推出的一款低价位、低功耗、高性能的32位RISC嵌入式处理器。该芯片采用ARM920T内核,5级流水线和哈佛结构,工作频率高达266 MHz,运行速度可达1.1 MIPS。S3C2410提供了丰富的内部资源,如:SDRAM控制器、LCD控制器、3通道的UART、4通道的DMA、2个SPI模块,支持轮询、中断与DMA三种数据发送模式。虽然内部没有CAN控制器,但可以通过SPI接口进行扩展,接口电路简单,易于实现。
CAN总线接口电路主要采用带SPI接口的独立CAN控制器MCP2510、CAN总线收发器TJA1050、高速光隔6N137和DC/DC电源隔离模块DCR010505等设备组成。独立CAN控制器MCP2510完全支持CAN总线的V 2.0A和V 2.0B的技术规范。系统设计时,将MCP2510作为从设备连接到S3C2410的SPI0口。TJA1050总线收发器是CAN控制器和物理总线之间的接口芯片,增强了总线的驱动能力。为增强CAN总线节点的抗干扰能力,MCP2510的TXCAN和RXCON并不直接与TJA1050的TXD和RXD相连,而是通过两片光电耦合器6N137与TJA1050相连,同时光隔芯片的两端电源采用DC/DC模块进行隔离。这样就实现了系统外总线CAN节点间的完全电气隔离,增强了节点的稳定性和安全性。总线两端都接有1个终端电阻(120 Ω)和1个TVS管,以消除反射信号,有效提高系统的抗干扰能力。
以太网接口电路是在S3C2410片上扩展网络接口芯片RTL8019AS,RTL8019AS是***REALTEK公司生产的一种基于ISA总线的高度集成的以太网控制器。它实现了以太网媒介访问层(MAC)和物理层(PHY)的全部功能,包括MAC数据帧的收发、地址识别、循环冗余检验(Cyclic Redundancy Check,CRC)编码/校验、曼彻斯特编解码、超时重传、链路完整性测试、信号极性检测与纠正等。RTL8019AS与主处理器有3种接口模式,跳线模式(Jumper),即插即用模式(PnP)和免跳线模式(Jumperless)。系统采用常见的跳线模式来选择I/O端口和中断。
2 协议转换流程
当CAN总线上的设备向Ethernet网发送数据时,嵌入式网关将接收到的CAN数据包解析,提取数据域中的内容;然后按照TCP/IP协议进行封装,嵌入式网关将经过封装的数据发送给以太网控制芯片RTL8019AS。由RTL8019AS自动给这些数据添加以太网物理层和逻辑链路层所需的相关信息,通过物理接口传送到以太网。反之,当以太网向CAN总线上设备发送TCP/IP数据包时,它首先将数据发送到RTL8019AS,嵌入式网关从RTL8019AS中接收到数据后,提取实际要传送的数据,然后封装成CAN总线数据格式,通过CAN总线将数据发送到网络中的现场设备。
嵌入式网关硬件必须具有以太网接口和CAN总线接口,而软件要有TCP/1P协议栈和CAN总线驱动程序;通常嵌入式Linux内核中有完整的TCP/IP协议栈。由于REALTEK公司支持Linux的开发,Linux系统中已含有RTL8019AS芯片的通用驱动程序,CAN总线协议驱动并不是标准配置。因此,设计CAN总线接口及其编制驱动程序是实现嵌入式网关最主要的工作。
3 CAN驱动程序设计
Linux驱动程序属于Linux内核的一部分,是嵌入式系统控制硬件的接口,它为用户屏蔽设备的工作细节,并向用户提供透明访问硬件设备的机制。驱动程序的开发在嵌入式系统开发中具有举足轻重的地位。开发出稳定、完备的驱动程序可提高整个系统的性能。
3.1 CAN驱动程序流程
MCP2510的内部结构框图如图2所示。
MCP2510内含3个发送缓冲器和2个接收缓冲器,同时还具有灵活的中断管理能力。CAN协议机负责与CAN总线的接口,SPI接口逻辑用于实现同MCU的通信,而寄存、缓冲器组与控制逻辑则用来完成各种方式的设定和操作控制。
在Linux多任务操作系统中,CAN总线通信程序的设计可分为发送数据模块、接收等待模块和中断处理模块实现。系统中CAN总线的数据发送和接收是两个不同的线程。在驱动程序中建立数据发送和接收缓冲区。中断处理程序只负责填充(或读取)缓冲区中的数据,然后唤醒等待接收(或发送)数据的任务。数据的发送与接收都通过独立的缓冲区,并由中断来实现。操作系统的中断响应时间在软件上决定了CAN总线数据的最快收发速度。
3.2 CAN设备驱动程序的实现要点
3.2.1 CAN设备驱动操作函数
CAN设备驱动程序最终提供给应用程序的是一个流控制接口,主要包括:open,realse,read,write,ioctl等操作。添加设备驱动程序,实际上就是给上述操作编写相应的程序代码。驱动程序加载到内核时,会首先运行驱动程序的初始化函数,然后等待系统调用在file_operations数据结构中定义的相关函数,实现对设备的操作。系统使用Linux 2.4.18版本,其文件系统接口被写义为:
s3c2410_mcp2510_open负责对将要进行的I/O操作做好必要的准备工作,主要包括限制CAN打开次数、清空3个发送缓冲区和2个接收缓冲区等。
s3c2410_mcp2510_write将要发送的数据通过SPI总线将数据传送MCP2510的发送缓冲器,再通过MCP2510将数据发送到CAN总线。
s3c2410_mcp2510_read用于将MCP2510从CAN总线上接收到接收缓冲器的数据,通过SPI总线读到用户区,并返回所读出的字节数。
s3c2410_mcp2510_ioctl用于控制CAN总线通信的波特率、设置帧ID、设置工作模式、设置设备滤波器等工作。
s3c2410_mcp2510_release用于释放所占用的内存、中断等资源。
3.2.2 CAN设备的初始化函数
CAN设备的初始化函数主要负责创建CAN设备的节点设备文件、注册CAN设备的中断处理函数、初始化MCP2510等工作。
在Linux系统中,初始化函数从s3c2410_mcp2510_init()开始。通过调用register_chrdev向系统注册字符型设备驱动程序;通过devfs_register()函数创建设备文件系统的CAN设备节点。同时,CAN设备驱动程序通过调用request_irq函数来申请中断,向系统注册CAN设备的CAN中断处理函数s3c2410_isr_mcp2510()。在实现了MCP2510的各个接口函数后,还需要编写MCP2510的模块加载函数module_init()和模块卸载函数module_exit(),用于向内核注册设备及注销设备。
3.2.3 驱动程序的加载与使用
Linux设备驱动会以内核模块的形式出现。Eth-ernet/CAN网关设备驱动程序作为内核的一部分,应在编译时把设备驱动程序编译成可加载的模块。当使用insmod命令加载内核模块时,模块的加载函数mod-ule_init(初始化函数名)会自动被内核执行,将初始化函数加入内核全局初始化函数列表中,在内核初始化时执行驱动的初始化函数,从而完成驱动的初始化和注册,之后驱动便停止等待,被应用程序调用。当用rm-mod命令卸载某内核模块时,模块的卸载函数module_exit(退出处理函数名)也会自动被内核执行,完成与模块加载函数相反的功能。当驱动程序加载到内核中后,就可将CAN设备文件进行open,read,write,release等操作。
4 结语
随着工业控制系统性能的提高,以太网在工业上的应用也会越来越广泛。在此详细介绍了一种嵌入式网关的设计与实现。作为连接以太网和现场总线的纽带,实现以太网与CAN现场总线之间的协议转换,为CAN/Ethernet的互联提供了一种传输速度快、成本低,稳定性和安全性高的解决方案。同时,利用嵌入式ARM处理器,接口资源丰富,设计通用性强,便于扩展其他现场总线与以太网的互联,具有较好的应用推广价值。

 举报
举报




