在微机控制领域中,许多单片机应用系统是实时控制系统RTCS(Real Time Control System)。在实时控制系统中,为了很好地完成外界信息的实时测量、计算和相应的多种实时控制操作,必须达到两个设计目标;实时性和并行性。即既要保证系统对外界信息以足够快的速度进行相应处理,又要同时完成多种任务操作。在这里,多种任务之间的调度是个关键。
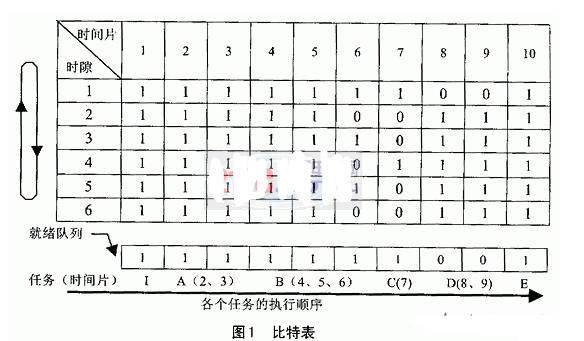
这种改进算法的关系在于把各任务划分为若干时间片,然后再根据实时性要求填入比特表中。根据比特表的设计方法,时隙间隔定为5ms,总时隙数为LCM(10/5,20/5,30/5)=6。把各中断级和时钟级任务运行时间的最大公约数定为时间片。即有如下计算公式:
T=GCD{Ti}
T为时间片,Ti为时钟级和中断级任务实时性要求,GCD(Greatest Common Divisor)求最大公约数,LCM(Lowest Common Multiple)求最小公倍数。
本例中的时间片T=GCD{0.5,1,2.5,1,5}=0.5ms。(假设时钟中断处理时间为0.5ms)。
在微机控制领域中,许多单片机应用系统是实时控制系统RTCS(Real Time Control System)。在实时控制系统中,为了很好地完成外界信息的实时测量、计算和相应的多种实时控制操作,必须达到两个设计目标;实时性和并行性。即既要保证系统对外界信息以足够快的速度进行相应处理,又要同时完成多种任务操作。在这里,多种任务之间的调度是个关键。
这种改进算法的关系在于把各任务划分为若干时间片,然后再根据实时性要求填入比特表中。根据比特表的设计方法,时隙间隔定为5ms,总时隙数为LCM(10/5,20/5,30/5)=6。把各中断级和时钟级任务运行时间的最大公约数定为时间片。即有如下计算公式:
T=GCD{Ti}
T为时间片,Ti为时钟级和中断级任务实时性要求,GCD(Greatest Common Divisor)求最大公约数,LCM(Lowest Common Multiple)求最小公倍数。
本例中的时间片T=GCD{0.5,1,2.5,1,5}=0.5ms。(假设时钟中断处理时间为0.5ms)。

 1.gif
1.gif 3.gif
3.gif
 举报
举报



