毫米波具有抗干扰能力强、精度高、低仰角探测性能好、能够穿透等离子体等优点,已广泛应用于军事、民用等领域。在天线口径相同条件下,3mm波段毫米波探测器相对其它波段具有波束窄、探测距离远、目标定位准确等优点[1]。然而探测器回波信中含有各种噪声干扰,需进行去噪处理,选用适当的去噪方法可尽量减少噪声对目标识别结果的影响。小波分析与傅立叶分析相比,具有良好的时频局部特性和多分辨分析特性,在去噪领域应用广泛。传统小波的构造是以傅立叶变换为基础,而提升格式小波变换则是直接在时域分析问题,完全脱离了傅立叶变换,并且所有传统小波都可以通过提升方法构造出来[2]。Koichi Kuzume等人实现了基于FPGA的提升小波实时信号处理[3];A.R.Calderbank、Michael D.Adams等研究了整数小波变换及整数提升小波变换[4][5];国内很多人研究了基于提升格式小波变换的信号去噪[6][7]。采用提升小波进行信号去噪,运算速度快,耗费存储空间少,可实现整数小波变换,易满足信号处理的实时性要求。
3mm波段毫米波探测器小型化应用时信号处理系统的硬件平台浮点处理能力差,要求去噪算法最好为整数间的运算,考虑信号处理的实时性,算法的复杂度要适合硬件平台的运算速度。本文选用5/3小波在基于TMS320VC5509A型DSP的硬件平台上实现了毫米波探测器回波信号的实时去噪处理。
提升小波变换
提升小波变换由三个基本步骤构成:(1)分解,将原始离散信号分割为两个互不相交的子集,例如将信号x(n)按位置分为奇偶序列xo(2n+1)和xe(2n),即常用的lazy小波变换。(2)预测,又称对偶提升。定义预测算子P来产生小波系数d,其表达式为:d=xo-P(xe),即用xe去预测xo产生的误差。由于信号有局部相关性,信号某一点的值可以通过其相邻的值经合适的预测算子来预测,预测误差就是信号的高频信息。(3)更新,又称原始提升。通过更新算子U产生尺度系数c,其表达式为:c=xe+U(d),即用d来调整信号的下采样xe,得到信号的低频分量。以上三个步骤为提升小波变换的前向变换,而逆向变换只需改变前向变换公式中的正负号和颠倒计算步骤次序。
5/3小波是具有对称结构的双正交小波,其分解端与重构端的滤波器长度分别为5和3,消失矩都为2,广泛应用于滤波及图像处理等领域。其提升系数分别为α=-1/2,β=1/4,可表示为1/2n(n为整数),运算过程只含有加法和移位运算,大大加快了运算速度,利于通用计算机以外的硬件平台的实现。基于整数的5/3小波算法步骤为:
(1)xo(n)=x(2n+1),xe(n)=x(2n)
(2)d1(n)=xo(n)+int(α(xe(n)+xe(n+1))+1/2)
(3)c1(n)=xe(n)+int(β(d1(n)+d1(n-1))+1/2)
其中int(·)表示取整运算。
回波信号去噪效果分析
小波域阈值滤波法实现简单,计算量小,是目前应用最广泛的一种小波去噪算法,可分为软阈值函数法和硬阈值函数法。软阈值函数法是将绝对值小于阈值的小波系数替换为零,绝对值大于阈值的小波系数用阈值来缩减,其表达式为:
硬阈值函数法是将绝对值小于阈值的小波系数替换为零,绝对值大于阈值的小波系数保持不变,其表达式为:

表1 正弦信号各小波去噪效果仿真


图1 回波信号硬阈值法去噪效果比较
实验中采用精度为10位的模数转换器对3mm波段毫米波探测器回波信号进行采样,将采样数据输入计算机,利用matlab进行仿真。分别采用整数的9/7-F小波、CDF9/7小波、5/3小波,做3层分解,基于软阈值函数法和硬阈值函数法对信号进行去噪处理,去噪效果如图1、图2所示。可见对于毫米波探测器回波信号去噪,三种小波差别极小,9/7-F小波和CDF9/7小波对细节保留稍好,而5/3小波则更为平滑。
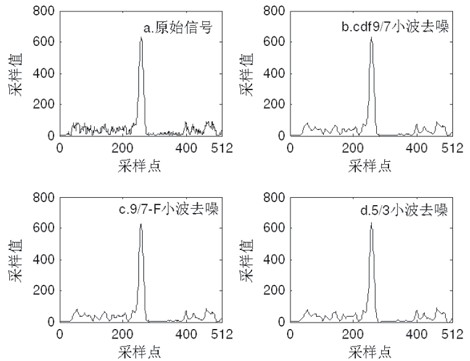
图2 回波信号软阈值法去噪效果比较
算法复杂度分析及硬件实现
基于整数的9/7-F小波和CDF9/7小波的算法复杂度相同,而5/3小波算法较为简单,其算法复杂度比较如表2所示。算法实现时,CDF9/7小波为浮点运算,不适合硬件平台。9/7-F小波含有整数的乘法、加法和移位运算,而5/3小波只有整数的加法和移位运算,较9/7-F小波更为简单。综合考虑算法的复杂度、信号去噪效果及硬件平台的运算能力,实际3mm波段毫米波探测器信号处理系统中选用整数5/3小波软阈值函数法对回波信号进行去噪处理。
表2 各小波算法复杂度比较

毫米波探测器信号处理的实时性要求为:在采样数据下次更新前要完成信号去噪、特征提取、目标识别等功能。考虑3层小波变换的5/3小波软阈值函数法去噪算法,设需处理的数据个数为N,且N为2的整数次幂。由5/3小波的算法步骤可知,第i(i=1,2,3)层小波变换的加法和移位算次数为:5N/2i-1和2N/2i-1。信号重构时的运算量同分解时,阈值函数对小波系数处理时包括阈值的确定和系数的处理。确定阈值时首先对小波系数的绝对值排序(和大小顺序无关),其运算量为∑N/2i(N/2i-1)次判断和3∑N/2i(N/2i-1)次赋值(即数据在存储空间的地址交换);因小波系数的个数皆为偶数,中值取排序后中间两数的平均值,故计算中值时的多了3次加法和3次移位;利用前述阈值计算公式计算阈值的运算量为3次乘法和3次移位;小波系数处理的运算量最大为N/2i次判断和N/2i次加法。那么信号去噪算法的总运算量为2∑(5N/2i-1)+∑N/2i+3次加法、2∑(2N/2i-1)+3次移位、3次乘法、3∑N/2i(N/2i-1)次赋值、∑N/2i(N/2i-1)+∑N/2i次判断。
实际信号处理系统中,信号采样间隔为100μs,处理器每次处理64个采样点,采用数据流方式,每次处理更新一个点。通用定点DSP可以在单指令周期完成加法、移位、乘法、乘加、判断及赋值运算。算法所需总的处理器指令周期数是上述运算次数的总和,即6841个指令周期。那么系统要求处理器的运算速度最低为6841/1e-4=68.41MIPS。若考虑其它控制指令的执行、信号的特征提取、目标识别及采用C语言编程时编译器的编译效率,则对处理器的运算速度要求更高,经实验,系统要求处理器最低运算速度为160MIPS。
美国TI公司的TMS320VC5509A型32位定点DSP具有运算速度快、精度高、编程灵活、功耗低、外设资源丰富、集成度高、体积小、外围电路简单等特点,其最高运算速度为200MIPS,可以满足3mm波段毫米波探测器的信号处理系统实时性及小型化的要求。本设计选用此款DSP构建了3mm波段毫米波探测器信号处理的硬件平台,系统框图如图3所示。

图3 信号处理系统框图
结语
通过比较9/7-F小波、CDF9/7小波、5/3小波在3mm波段毫米波探测器回波信号去噪中的效果及算法复杂度,选用运算只涉及整数加法和移位的整数5/3小波,具体分析了算法实现时对硬件平台处理速度的要求,选用TMS320VC5509A型DSP构建了探测器信号处理系统的硬件平台,并成功实现了回波信号实时去噪。经多次实验,此成果已应用于实际工程产品中。
毫米波具有抗干扰能力强、精度高、低仰角探测性能好、能够穿透等离子体等优点,已广泛应用于军事、民用等领域。在天线口径相同条件下,3mm波段毫米波探测器相对其它波段具有波束窄、探测距离远、目标定位准确等优点[1]。然而探测器回波信中含有各种噪声干扰,需进行去噪处理,选用适当的去噪方法可尽量减少噪声对目标识别结果的影响。小波分析与傅立叶分析相比,具有良好的时频局部特性和多分辨分析特性,在去噪领域应用广泛。传统小波的构造是以傅立叶变换为基础,而提升格式小波变换则是直接在时域分析问题,完全脱离了傅立叶变换,并且所有传统小波都可以通过提升方法构造出来[2]。Koichi Kuzume等人实现了基于FPGA的提升小波实时信号处理[3];A.R.Calderbank、Michael D.Adams等研究了整数小波变换及整数提升小波变换[4][5];国内很多人研究了基于提升格式小波变换的信号去噪[6][7]。采用提升小波进行信号去噪,运算速度快,耗费存储空间少,可实现整数小波变换,易满足信号处理的实时性要求。
3mm波段毫米波探测器小型化应用时信号处理系统的硬件平台浮点处理能力差,要求去噪算法最好为整数间的运算,考虑信号处理的实时性,算法的复杂度要适合硬件平台的运算速度。本文选用5/3小波在基于TMS320VC5509A型DSP的硬件平台上实现了毫米波探测器回波信号的实时去噪处理。
提升小波变换
提升小波变换由三个基本步骤构成:(1)分解,将原始离散信号分割为两个互不相交的子集,例如将信号x(n)按位置分为奇偶序列xo(2n+1)和xe(2n),即常用的lazy小波变换。(2)预测,又称对偶提升。定义预测算子P来产生小波系数d,其表达式为:d=xo-P(xe),即用xe去预测xo产生的误差。由于信号有局部相关性,信号某一点的值可以通过其相邻的值经合适的预测算子来预测,预测误差就是信号的高频信息。(3)更新,又称原始提升。通过更新算子U产生尺度系数c,其表达式为:c=xe+U(d),即用d来调整信号的下采样xe,得到信号的低频分量。以上三个步骤为提升小波变换的前向变换,而逆向变换只需改变前向变换公式中的正负号和颠倒计算步骤次序。
5/3小波是具有对称结构的双正交小波,其分解端与重构端的滤波器长度分别为5和3,消失矩都为2,广泛应用于滤波及图像处理等领域。其提升系数分别为α=-1/2,β=1/4,可表示为1/2n(n为整数),运算过程只含有加法和移位运算,大大加快了运算速度,利于通用计算机以外的硬件平台的实现。基于整数的5/3小波算法步骤为:
(1)xo(n)=x(2n+1),xe(n)=x(2n)
(2)d1(n)=xo(n)+int(α(xe(n)+xe(n+1))+1/2)
(3)c1(n)=xe(n)+int(β(d1(n)+d1(n-1))+1/2)
其中int(·)表示取整运算。
回波信号去噪效果分析
小波域阈值滤波法实现简单,计算量小,是目前应用最广泛的一种小波去噪算法,可分为软阈值函数法和硬阈值函数法。软阈值函数法是将绝对值小于阈值的小波系数替换为零,绝对值大于阈值的小波系数用阈值来缩减,其表达式为:
硬阈值函数法是将绝对值小于阈值的小波系数替换为零,绝对值大于阈值的小波系数保持不变,其表达式为:
表1 正弦信号各小波去噪效果仿真
图1 回波信号硬阈值法去噪效果比较
实验中采用精度为10位的模数转换器对3mm波段毫米波探测器回波信号进行采样,将采样数据输入计算机,利用matlab进行仿真。分别采用整数的9/7-F小波、CDF9/7小波、5/3小波,做3层分解,基于软阈值函数法和硬阈值函数法对信号进行去噪处理,去噪效果如图1、图2所示。可见对于毫米波探测器回波信号去噪,三种小波差别极小,9/7-F小波和CDF9/7小波对细节保留稍好,而5/3小波则更为平滑。
图2 回波信号软阈值法去噪效果比较
算法复杂度分析及硬件实现
基于整数的9/7-F小波和CDF9/7小波的算法复杂度相同,而5/3小波算法较为简单,其算法复杂度比较如表2所示。算法实现时,CDF9/7小波为浮点运算,不适合硬件平台。9/7-F小波含有整数的乘法、加法和移位运算,而5/3小波只有整数的加法和移位运算,较9/7-F小波更为简单。综合考虑算法的复杂度、信号去噪效果及硬件平台的运算能力,实际3mm波段毫米波探测器信号处理系统中选用整数5/3小波软阈值函数法对回波信号进行去噪处理。
表2 各小波算法复杂度比较
毫米波探测器信号处理的实时性要求为:在采样数据下次更新前要完成信号去噪、特征提取、目标识别等功能。考虑3层小波变换的5/3小波软阈值函数法去噪算法,设需处理的数据个数为N,且N为2的整数次幂。由5/3小波的算法步骤可知,第i(i=1,2,3)层小波变换的加法和移位算次数为:5N/2i-1和2N/2i-1。信号重构时的运算量同分解时,阈值函数对小波系数处理时包括阈值的确定和系数的处理。确定阈值时首先对小波系数的绝对值排序(和大小顺序无关),其运算量为∑N/2i(N/2i-1)次判断和3∑N/2i(N/2i-1)次赋值(即数据在存储空间的地址交换);因小波系数的个数皆为偶数,中值取排序后中间两数的平均值,故计算中值时的多了3次加法和3次移位;利用前述阈值计算公式计算阈值的运算量为3次乘法和3次移位;小波系数处理的运算量最大为N/2i次判断和N/2i次加法。那么信号去噪算法的总运算量为2∑(5N/2i-1)+∑N/2i+3次加法、2∑(2N/2i-1)+3次移位、3次乘法、3∑N/2i(N/2i-1)次赋值、∑N/2i(N/2i-1)+∑N/2i次判断。
实际信号处理系统中,信号采样间隔为100μs,处理器每次处理64个采样点,采用数据流方式,每次处理更新一个点。通用定点DSP可以在单指令周期完成加法、移位、乘法、乘加、判断及赋值运算。算法所需总的处理器指令周期数是上述运算次数的总和,即6841个指令周期。那么系统要求处理器的运算速度最低为6841/1e-4=68.41MIPS。若考虑其它控制指令的执行、信号的特征提取、目标识别及采用C语言编程时编译器的编译效率,则对处理器的运算速度要求更高,经实验,系统要求处理器最低运算速度为160MIPS。
美国TI公司的TMS320VC5509A型32位定点DSP具有运算速度快、精度高、编程灵活、功耗低、外设资源丰富、集成度高、体积小、外围电路简单等特点,其最高运算速度为200MIPS,可以满足3mm波段毫米波探测器的信号处理系统实时性及小型化的要求。本设计选用此款DSP构建了3mm波段毫米波探测器信号处理的硬件平台,系统框图如图3所示。
图3 信号处理系统框图
结语
通过比较9/7-F小波、CDF9/7小波、5/3小波在3mm波段毫米波探测器回波信号去噪中的效果及算法复杂度,选用运算只涉及整数加法和移位的整数5/3小波,具体分析了算法实现时对硬件平台处理速度的要求,选用TMS320VC5509A型DSP构建了探测器信号处理系统的硬件平台,并成功实现了回波信号实时去噪。经多次实验,此成果已应用于实际工程产品中。

 举报
举报




