在无线传感器网络中,群组的概念用于描述一个组中的成员是如何相互作用的。群组中的各个成员需要知道相互间的相对位置。已经有公司在无线传感器网络中增加了位置意识,以便群组成员可以测量彼此之间的距离,并能够使用这个信息作出决策。通信和位置意识一起正在催生一种全新的地理位置应用。
群组平台技术
低功耗群组电台即独立的2.4GHz线性调频扩展频谱无线节点,是基本的群组构建模块(见图1)。它们能够广播和交换消息,同时监视到群组中其它成员的距离,这是实现协调的群组行为的关键功能。无线群组中的每个成员都包含有一个群组电台,并通过其应用编程接口(API)接受主机的控制。有多个种类的API命令(见图2)。
图1:Nanotron公司推出的迷你型群组电台。

图2:Nanotron公司的群组API命令总览。
举例来说,RangeTo 命令可以返回到其它节点的距离。位置感知的质量取决于两个基本参数:精度和时延。精度是测量距离与实际距离之差,通常可以被表征为一个固定的偏移和结果的扩展,如图3所示。时延规定了获得测距结果所需的时间,它对应用的实时特性有很大的影响。短消息和快速响应有助于最大限度地减小时延,进而实现最大的吞吐量。典型的群组电台要求1.8ms的空中时间用于执行一个SDS-TWR循环——Nanotron公司获得专利的对称性双边双向测距。广播它的ID只需要350ms。

图3:测距精度被表征为偏移量和结果的扩展。实际距离分别是50、100和150米。
群组电台的最大可用距离决定了群组中的成员距离多远仍能够相互作用。最大距离很大程度上取决于应用环境。
在理想的视距条件下,距离可能超过500米。然而,由于障碍、反射、来自其它无线电信号的干扰、天线未对准等原因,实际可用距离要短得多。

图4:在配备有一台迷你型群组电台的行人与安装在客车仪表板上的另一台群组电台之间测得的距离。
图4显示了一个实际应用例子,其中一个群组电台在汽车里面,另一个由人携带。通过在汽车外部配置天线或者将天线安装在头盔上而不是腰带上可以有效扩展距离。
碰撞避免解决方案(CAS)
在采矿应用中经常需要自动碰撞避免功能。为了防止发生事故,只要车辆离人、财产或其它车辆太近都要求可靠地发出告警声。群组地理位置技术非常适合用来实现这种碰撞避免解决方案(CAS)。
由车辆、财产和人组成的简化结构(总共三种节点类型)被用来描述这种应用的基本概要。在最坏的情况下两个对象以最大速度向彼此移动,见表1。系统的反应时间要快过两个对象沿最短路径碰撞方向穿过各自安全区所需的时间。
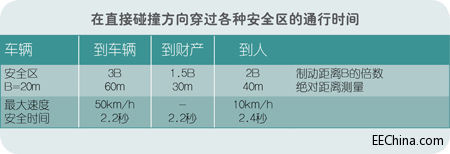
在我们这个例子中,最短时间是2.2秒。因此CAS系统的时延必须尽可能短,整组节点需要在不到2.2秒的时间内完成完整的位置感知循环。为了可靠的工作,我们可以决定加快这个顺序,以便在这个时间间隔内执行多次。

图5:碰撞避免应用流程图。
图5显示了位置感知循环的步骤,以及群组电台是如何支持的:
获得ID(4):第一步,群组电台通过广播自己的ID使自己可见。比如SetBroadcastIntervall=01命令将闪烁间隔设为1秒。在通过SetBroadcastNodeID=1命令激活广播之后,群组电台就每隔1秒广播一次自己的ID。接收到的其它参与者的节点ID被自动存储在NodeID清单中。主机应用可以使用GetNodeIDList命令读取这份NodeID清单。这样邻居就能被CAS应用识别了。
到ID的距离(5):第二步是群组电台测量到所有邻居的距离,这可以通过随后执行RangeTo命令来完成。最终距离值被传送回主机应用。
评估距离(6):第三步,CAS应用需要确定任何测得的距离是否违反了安全区要求,如果违反了就需要采取相应的措施。此时可能马上调用简单的声音告警,或踩下卡车的刹车以防止即将发生的碰撞。
作为CAS应用设计的一部分,现在可以估计执行一个位置感知循环所需的时间并在需要时触发告警。在我们的例子中整个过程不超过30ms;因此上述时间约束很容易得到满足。
所有群组电台都共享相同的空中接口。CAS应用以完全异步的方式工作,因此可能会发生数据包冲突。用多个位置感知循环而不是一个可以提高成功的概率。与此同时,通过空中接口的业务不得超过通道容量。广播节点ID和完整的测距过程一起共花大约2.2ms的空中时间。对CAS应用来说这个时间只是2.2秒循环时间的0.1%。根据经验,应该使用不超过17%的可用空中时间才能在成功率与吞吐量之间取得良好的平衡。当通过增加更多群组电台扩展应用时这点很重要。
在实际的群组应用中,安全区可以设计为动态适应移动对象的实际速度和潜在碰撞方向最新测得的距离。这样可以最大限度地减少总的告警数量,而且在通道饱和发生之前系统中可以使用的群组电台数量可以做到最大化。Nanotron公司的群组平台非常适合用于快速构建地理位置应用。
群组电台具有位置感知,因为它们能够测量相互间的距离并交换结果。距离、测距精度、时延和吞吐量对基于群平台的地理位置应用来说是很重要的设计参数。
在无线传感器网络中,群组的概念用于描述一个组中的成员是如何相互作用的。群组中的各个成员需要知道相互间的相对位置。已经有公司在无线传感器网络中增加了位置意识,以便群组成员可以测量彼此之间的距离,并能够使用这个信息作出决策。通信和位置意识一起正在催生一种全新的地理位置应用。
群组平台技术
低功耗群组电台即独立的2.4GHz线性调频扩展频谱无线节点,是基本的群组构建模块(见图1)。它们能够广播和交换消息,同时监视到群组中其它成员的距离,这是实现协调的群组行为的关键功能。无线群组中的每个成员都包含有一个群组电台,并通过其应用编程接口(API)接受主机的控制。有多个种类的API命令(见图2)。
图1:Nanotron公司推出的迷你型群组电台。
图2:Nanotron公司的群组API命令总览。
举例来说,RangeTo 命令可以返回到其它节点的距离。位置感知的质量取决于两个基本参数:精度和时延。精度是测量距离与实际距离之差,通常可以被表征为一个固定的偏移和结果的扩展,如图3所示。时延规定了获得测距结果所需的时间,它对应用的实时特性有很大的影响。短消息和快速响应有助于最大限度地减小时延,进而实现最大的吞吐量。典型的群组电台要求1.8ms的空中时间用于执行一个SDS-TWR循环——Nanotron公司获得专利的对称性双边双向测距。广播它的ID只需要350ms。
图3:测距精度被表征为偏移量和结果的扩展。实际距离分别是50、100和150米。
群组电台的最大可用距离决定了群组中的成员距离多远仍能够相互作用。最大距离很大程度上取决于应用环境。
在理想的视距条件下,距离可能超过500米。然而,由于障碍、反射、来自其它无线电信号的干扰、天线未对准等原因,实际可用距离要短得多。
图4:在配备有一台迷你型群组电台的行人与安装在客车仪表板上的另一台群组电台之间测得的距离。
图4显示了一个实际应用例子,其中一个群组电台在汽车里面,另一个由人携带。通过在汽车外部配置天线或者将天线安装在头盔上而不是腰带上可以有效扩展距离。
碰撞避免解决方案(CAS)
在采矿应用中经常需要自动碰撞避免功能。为了防止发生事故,只要车辆离人、财产或其它车辆太近都要求可靠地发出告警声。群组地理位置技术非常适合用来实现这种碰撞避免解决方案(CAS)。
由车辆、财产和人组成的简化结构(总共三种节点类型)被用来描述这种应用的基本概要。在最坏的情况下两个对象以最大速度向彼此移动,见表1。系统的反应时间要快过两个对象沿最短路径碰撞方向穿过各自安全区所需的时间。
在我们这个例子中,最短时间是2.2秒。因此CAS系统的时延必须尽可能短,整组节点需要在不到2.2秒的时间内完成完整的位置感知循环。为了可靠的工作,我们可以决定加快这个顺序,以便在这个时间间隔内执行多次。
图5:碰撞避免应用流程图。
图5显示了位置感知循环的步骤,以及群组电台是如何支持的:
获得ID(4):第一步,群组电台通过广播自己的ID使自己可见。比如SetBroadcastIntervall=01命令将闪烁间隔设为1秒。在通过SetBroadcastNodeID=1命令激活广播之后,群组电台就每隔1秒广播一次自己的ID。接收到的其它参与者的节点ID被自动存储在NodeID清单中。主机应用可以使用GetNodeIDList命令读取这份NodeID清单。这样邻居就能被CAS应用识别了。
到ID的距离(5):第二步是群组电台测量到所有邻居的距离,这可以通过随后执行RangeTo命令来完成。最终距离值被传送回主机应用。
评估距离(6):第三步,CAS应用需要确定任何测得的距离是否违反了安全区要求,如果违反了就需要采取相应的措施。此时可能马上调用简单的声音告警,或踩下卡车的刹车以防止即将发生的碰撞。
作为CAS应用设计的一部分,现在可以估计执行一个位置感知循环所需的时间并在需要时触发告警。在我们的例子中整个过程不超过30ms;因此上述时间约束很容易得到满足。
所有群组电台都共享相同的空中接口。CAS应用以完全异步的方式工作,因此可能会发生数据包冲突。用多个位置感知循环而不是一个可以提高成功的概率。与此同时,通过空中接口的业务不得超过通道容量。广播节点ID和完整的测距过程一起共花大约2.2ms的空中时间。对CAS应用来说这个时间只是2.2秒循环时间的0.1%。根据经验,应该使用不超过17%的可用空中时间才能在成功率与吞吐量之间取得良好的平衡。当通过增加更多群组电台扩展应用时这点很重要。
在实际的群组应用中,安全区可以设计为动态适应移动对象的实际速度和潜在碰撞方向最新测得的距离。这样可以最大限度地减少总的告警数量,而且在通道饱和发生之前系统中可以使用的群组电台数量可以做到最大化。Nanotron公司的群组平台非常适合用于快速构建地理位置应用。
群组电台具有位置感知,因为它们能够测量相互间的距离并交换结果。距离、测距精度、时延和吞吐量对基于群平台的地理位置应用来说是很重要的设计参数。

 举报
举报




