光电轴角编码器,又称光电角位置传感器,是一种集光、机、电为一体的精密数字测角装置,它把轴角信息转换成数字代码,与计算机和显示装置连接后可实现动态测量和实时控制。随着编码器在工业、国防、航天等部门的广泛应用,对编码器的技术指标提出了越来越高的要求。测角误差是编码器的重要技术指标, 细分误差是测角误差的主要分量,细分误差的检定要求用精密的小角度测量仪器|仪表在严格的实验室条件下进行,且检测过程复杂、时间长。为了存编码器使用现场快速及时地检测出编码器的细分误差,研制了一种编码器的细分误差快速测量系统,将编码器精码的光电信号采集到计算机,进行谐波分析,计算出编码器的细分误差。
1 数据采集系统
1.1 系统硬件
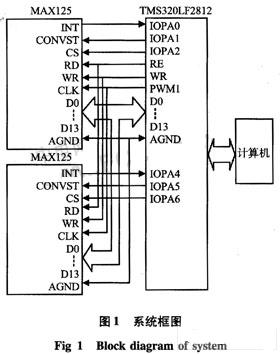
该系统的核心器件是TMS320F2812和MAX125。TMS320F2812是TI公司的一款高速DSP处理芯片。本系统采用1片DSP芯片控制2片A/D转换芯片。图1所示为DSP控制2片转换芯片的系统框图。
1.2 TMS320F2812
C281x系列DSP是TI公司最新推出的32位定点数字信号处理器,是基于TMS320C2000数字信号处理器平台开发的,其代码与24x/240x数字信号处理器完全兼容。
C281x处理器采用C/C++编写软件,其效率高,用户不仅可以应用高级语言编写系统程序,也可采用C/C++高效率的数学算法。C281x 系列数字信号处理器在完成数学算法和系统控制等任务时都具有较高的性能,这样,就避免了用户在1个系统中需要多只处理器的麻烦。C281x处理器内核包含了1个32位×32位的乘法累计单元,能够完成64位的数据处理能力。从而使该处理器能够完成更高精度的处理任务。
1.3 MAX125
MAX125是一款带多路采样保持器的高速14位A/D转换芯片。该芯片包含1只14位,转换时间为3μs的逐次逼近式A/D转换器,1 个+2.5 V的内部电压基准。每一个采样保持器都对应2路输入信号,一共可以接收8路信号输入。输入电压为±5 V。芯片具有±17 V输入电压保护。
MAX125采用的是并行数据接口,和DSP的数据存取时序相同,与DSP通信时不需要等待周期,可以达到很高的通信速率。单路转换的最高速率为250 ksps,4路最高速率为76 ksps。
1.4 软件控制流程
要分析编码器在工作时的细分误差,数据采集速率要在100 ksps以上。本系统采用2片A/D转换芯片,分时采集编码器的4路信号,当读其中一片芯片的数据时,启动另一芯片开始转换。采用本方法4通道的最高采样速率可达120 ksps以上,2通道的最高采样速率可达240 ksps以上。
采集到的数据需要经过傅立叶变换,计算出编码器的细分误差。当数据量太大时,会给后续的数据处理带来很多麻烦;数据量太少时,又不能反映信号的真实情况。实验证明:编码器每个精码周期的最佳采样点数应在60~100点之间。在本系统中采样点设定为85点,根据编码器加速度的变化,采样点会在附近波动。DSP在接收到采样命令后,对编码器信号进行采样,首先,判断编码器的转速,设定采样频率,保证一个周期的采样点数在85点左右,连续采样3个以上完整的周期,采样完成后将数据一并传给计算机处理。
2 数据处理
编码器输出的是角度信息,其输出信号是以角度为自变量的空间函数。如果数据采集卡的采样频率是固定的,并且,编码器是匀速转动,理论上可以得到等转角的角度信息。在编码器实验或工作时,数据采集卡的采样频率可以控制成固定采样频率,但编码器不可能是严格意义上的匀速运动,可以认为是加速度很小的等加速运动,所以,采集到的精码光电信号是非等转角的。在编码器工作时,采集2路相位差为π/2的正弦精码光电信号usin和ucos,首先,计算编码器的加速度,再利用线性插值法进行等转角处理,得到一组新的数据u′sin和u′cos,由u′sin和u′cos组成的精码光电信号就是一组等转角的光电信号。
编码器2路相位差为π/2的正弦精码光电信号ua和ub,精码光电信号通常含有直流电平、基波及高次谐波。高次谐波以二次和三次谐波为主要分量,故可其波形方程为

编码器精码光电信号具有周期函数的性质,任何一个周期函数,都可以展开为如下的傅立叶级数
式(4)表明:一个周期函数可以由常数项a0与各次谐波之和组成。其中,An为f(x)的各次谐波的振幅;φn为相应的各次谐波的初相角。这样,对实测数据信号进行谐波分析,可以求出a0,An和φn。
由于信号u′sin和u′cos是编码器的等转角信号,可以对其进行谐波分析。利用软件VC++编写计算程序计算出式(1)和式(2)的波形参数,即求出精码光电信号的波形方程。编码器光电信号的细分技术是建立在一定信号波形(通常为正弦波)的基础上。当波形参数偏离预定参数时,就会产

3 实验测量
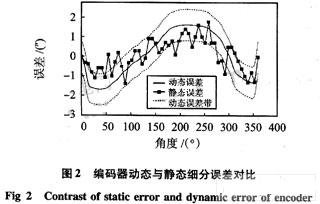
某21位增量式编码器为8192对线/周光栅盘,经电子学256细分后,分辨力为0.6“。利用数据采集卡将差分放大后的2路精码光电信号与数据采集装置的2路输入端相连,通过人机操作界面运行数据采集程序。采集编码器精码光电信号放大后的电压值,接人计算机得到动态数据,并计算动态细分误差。利用二十一面体和自准直仪,任意选择一个细分周期,测量静态细分误差,动态与静态细分误差曲线如图2所示。
4 结论
本文提出了一种高精度编码器动态细分误差的快速测量系统,与传统的静态检测编码器细分误差方法相比,该方法检测编码器动态细分误差的实验过程简便、检测速度快。不仅可用于实验室检测,也可以用于编码器工作现场对编码器动态细分误差进行*估。实验证明:该方法是可行的。
光电轴角编码器,又称光电角位置传感器,是一种集光、机、电为一体的精密数字测角装置,它把轴角信息转换成数字代码,与计算机和显示装置连接后可实现动态测量和实时控制。随着编码器在工业、国防、航天等部门的广泛应用,对编码器的技术指标提出了越来越高的要求。测角误差是编码器的重要技术指标, 细分误差是测角误差的主要分量,细分误差的检定要求用精密的小角度测量仪器|仪表在严格的实验室条件下进行,且检测过程复杂、时间长。为了存编码器使用现场快速及时地检测出编码器的细分误差,研制了一种编码器的细分误差快速测量系统,将编码器精码的光电信号采集到计算机,进行谐波分析,计算出编码器的细分误差。
1 数据采集系统
1.1 系统硬件
该系统的核心器件是TMS320F2812和MAX125。TMS320F2812是TI公司的一款高速DSP处理芯片。本系统采用1片DSP芯片控制2片A/D转换芯片。图1所示为DSP控制2片转换芯片的系统框图。
1.2 TMS320F2812
C281x系列DSP是TI公司最新推出的32位定点数字信号处理器,是基于TMS320C2000数字信号处理器平台开发的,其代码与24x/240x数字信号处理器完全兼容。
C281x处理器采用C/C++编写软件,其效率高,用户不仅可以应用高级语言编写系统程序,也可采用C/C++高效率的数学算法。C281x 系列数字信号处理器在完成数学算法和系统控制等任务时都具有较高的性能,这样,就避免了用户在1个系统中需要多只处理器的麻烦。C281x处理器内核包含了1个32位×32位的乘法累计单元,能够完成64位的数据处理能力。从而使该处理器能够完成更高精度的处理任务。
1.3 MAX125
MAX125是一款带多路采样保持器的高速14位A/D转换芯片。该芯片包含1只14位,转换时间为3μs的逐次逼近式A/D转换器,1 个+2.5 V的内部电压基准。每一个采样保持器都对应2路输入信号,一共可以接收8路信号输入。输入电压为±5 V。芯片具有±17 V输入电压保护。
MAX125采用的是并行数据接口,和DSP的数据存取时序相同,与DSP通信时不需要等待周期,可以达到很高的通信速率。单路转换的最高速率为250 ksps,4路最高速率为76 ksps。
1.4 软件控制流程
要分析编码器在工作时的细分误差,数据采集速率要在100 ksps以上。本系统采用2片A/D转换芯片,分时采集编码器的4路信号,当读其中一片芯片的数据时,启动另一芯片开始转换。采用本方法4通道的最高采样速率可达120 ksps以上,2通道的最高采样速率可达240 ksps以上。
采集到的数据需要经过傅立叶变换,计算出编码器的细分误差。当数据量太大时,会给后续的数据处理带来很多麻烦;数据量太少时,又不能反映信号的真实情况。实验证明:编码器每个精码周期的最佳采样点数应在60~100点之间。在本系统中采样点设定为85点,根据编码器加速度的变化,采样点会在附近波动。DSP在接收到采样命令后,对编码器信号进行采样,首先,判断编码器的转速,设定采样频率,保证一个周期的采样点数在85点左右,连续采样3个以上完整的周期,采样完成后将数据一并传给计算机处理。
2 数据处理
编码器输出的是角度信息,其输出信号是以角度为自变量的空间函数。如果数据采集卡的采样频率是固定的,并且,编码器是匀速转动,理论上可以得到等转角的角度信息。在编码器实验或工作时,数据采集卡的采样频率可以控制成固定采样频率,但编码器不可能是严格意义上的匀速运动,可以认为是加速度很小的等加速运动,所以,采集到的精码光电信号是非等转角的。在编码器工作时,采集2路相位差为π/2的正弦精码光电信号usin和ucos,首先,计算编码器的加速度,再利用线性插值法进行等转角处理,得到一组新的数据u′sin和u′cos,由u′sin和u′cos组成的精码光电信号就是一组等转角的光电信号。
编码器2路相位差为π/2的正弦精码光电信号ua和ub,精码光电信号通常含有直流电平、基波及高次谐波。高次谐波以二次和三次谐波为主要分量,故可其波形方程为
编码器精码光电信号具有周期函数的性质,任何一个周期函数,都可以展开为如下的傅立叶级数
式(4)表明:一个周期函数可以由常数项a0与各次谐波之和组成。其中,An为f(x)的各次谐波的振幅;φn为相应的各次谐波的初相角。这样,对实测数据信号进行谐波分析,可以求出a0,An和φn。
由于信号u′sin和u′cos是编码器的等转角信号,可以对其进行谐波分析。利用软件VC++编写计算程序计算出式(1)和式(2)的波形参数,即求出精码光电信号的波形方程。编码器光电信号的细分技术是建立在一定信号波形(通常为正弦波)的基础上。当波形参数偏离预定参数时,就会产
3 实验测量
某21位增量式编码器为8192对线/周光栅盘,经电子学256细分后,分辨力为0.6“。利用数据采集卡将差分放大后的2路精码光电信号与数据采集装置的2路输入端相连,通过人机操作界面运行数据采集程序。采集编码器精码光电信号放大后的电压值,接人计算机得到动态数据,并计算动态细分误差。利用二十一面体和自准直仪,任意选择一个细分周期,测量静态细分误差,动态与静态细分误差曲线如图2所示。
4 结论
本文提出了一种高精度编码器动态细分误差的快速测量系统,与传统的静态检测编码器细分误差方法相比,该方法检测编码器动态细分误差的实验过程简便、检测速度快。不仅可用于实验室检测,也可以用于编码器工作现场对编码器动态细分误差进行*估。实验证明:该方法是可行的。

 举报
举报




