倾角传感器及传感器包数据输出格式
倾角传感器选型
倾角传感器用于感应火箭炮车体的纵横向倾斜度,基本技术要求:①精度高于±0.012°;②使用环境温度为﹣40℃~﹢55℃。根据这些要求,选用北京星网宇达科技公司的TW-TS1110倾角传感器。该传感器内部采用高速数字处理器,对多维重力加速度信息进行处理与姿态角解算,并采用角度数字输出模式,输出速度为5Hz,测量范围为±15°。测量精度:当倾角≤±5°时,精度为±0.005°;当倾角≤±15°时,精度为±0.01°;当倾角≤±30°时,精度为±0.035°。传感器利用光刻电阻技术补偿非线性误差,解决了传统倾角传感器只有在小范围才能保证精度的现象,使得倾角传感器在全测量范围内线性化,保持同一额定精度指标。传感器还采用启动零位测试补偿技术,具有快速稳定输出能力,单点重复性为0.0015°;采用动态数字滤波技术,输出噪声低,且具有较高的分辨率,分辨率为0.002°,传感器内部采用动态零位与标度因数自校正技术。适合多种环境使用,使用环境温度为﹣40℃~﹢55℃。
传感器包数据输出格式
1发送数据格式定义
①ASCII码发送格式(单角度):24FFXXXXXXXXXX0D0A
说明——24:头标识$;FF:角度值的符号位(+2b/-2d);XX:ASCII码角度值(30~39);0D0A:角度发送字尾标识符(换行,回车)。
②二进制码发送格式(单角度):AAXXXXCC
AA:角度发送字头标识符;XX:带符号二进制数。5度倾角标度:6000bit/度;15度倾角标度:2000bit/度;30度倾角标度:1000bit/度;60度倾角标度:500bit/度。
CC:校验码;CC=数据字节1+数据字节2。
2接受命令格式定义
读角度命令格式如图2所示。该命令仅在应答工作模式下有效。每个传感器都有固定ID字(FFFF)和用户ID字(用户可设定,初始为0000),2个ID字都可读角度。
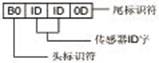
图2读角度命令格式
数据处理与无线数传电路设计
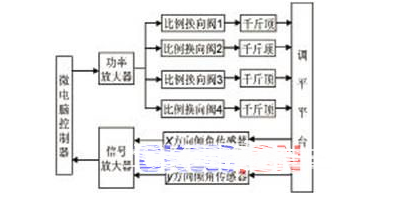
无线数传系统是无线数字传输系统的简称,该系统以无线数传模块为平台,在不影响装备功能情况下,实现数字终端之间数字信息的无线传输。数据处理与无线数传的主要任务是接收倾角传感器的数据输出,计算每个千斤顶相对车体水平面所要调整的角度,并通过无线数传模块传输给操纵指示器。
倾角传感器及传感器包数据输出格式
倾角传感器选型
倾角传感器用于感应火箭炮车体的纵横向倾斜度,基本技术要求:①精度高于±0.012°;②使用环境温度为﹣40℃~﹢55℃。根据这些要求,选用北京星网宇达科技公司的TW-TS1110倾角传感器。该传感器内部采用高速数字处理器,对多维重力加速度信息进行处理与姿态角解算,并采用角度数字输出模式,输出速度为5Hz,测量范围为±15°。测量精度:当倾角≤±5°时,精度为±0.005°;当倾角≤±15°时,精度为±0.01°;当倾角≤±30°时,精度为±0.035°。传感器利用光刻电阻技术补偿非线性误差,解决了传统倾角传感器只有在小范围才能保证精度的现象,使得倾角传感器在全测量范围内线性化,保持同一额定精度指标。传感器还采用启动零位测试补偿技术,具有快速稳定输出能力,单点重复性为0.0015°;采用动态数字滤波技术,输出噪声低,且具有较高的分辨率,分辨率为0.002°,传感器内部采用动态零位与标度因数自校正技术。适合多种环境使用,使用环境温度为﹣40℃~﹢55℃。
传感器包数据输出格式
1发送数据格式定义
①ASCII码发送格式(单角度):24FFXXXXXXXXXX0D0A
说明——24:头标识$;FF:角度值的符号位(+2b/-2d);XX:ASCII码角度值(30~39);0D0A:角度发送字尾标识符(换行,回车)。
②二进制码发送格式(单角度):AAXXXXCC
AA:角度发送字头标识符;XX:带符号二进制数。5度倾角标度:6000bit/度;15度倾角标度:2000bit/度;30度倾角标度:1000bit/度;60度倾角标度:500bit/度。
CC:校验码;CC=数据字节1+数据字节2。
2接受命令格式定义
读角度命令格式如图2所示。该命令仅在应答工作模式下有效。每个传感器都有固定ID字(FFFF)和用户ID字(用户可设定,初始为0000),2个ID字都可读角度。
图2读角度命令格式
数据处理与无线数传电路设计
无线数传系统是无线数字传输系统的简称,该系统以无线数传模块为平台,在不影响装备功能情况下,实现数字终端之间数字信息的无线传输。数据处理与无线数传的主要任务是接收倾角传感器的数据输出,计算每个千斤顶相对车体水平面所要调整的角度,并通过无线数传模块传输给操纵指示器。

 举报
举报