一些基本时钟切换术语
时钟芯片通常支持基于某些限定条件(例如LOS(Loss of Signal))或OOF(Out of Frequency)的条件,从一个输入时钟切换到另一个输入时钟。以下是最常用的术语:
自由模式
基于附加晶体或其他谐振器的输出时钟,或替代外部参考时钟。输出时钟的频率稳定性,漂移和抖动特性由芯片的晶振决定,与输入时钟无关。
保持模式
输出时钟基于所选输入时钟的历史频率数据,并且在输入时钟丢失并且没有有效的备用可用时使用。通常历史数据必须在一些最短时间内被收集,以被认为是有效的。频率精度与收集的数据一样好。
锁定模式
输出时钟频率和相位锁定到所选择的输入时钟,即正常操作。
标准输入时钟切换配置
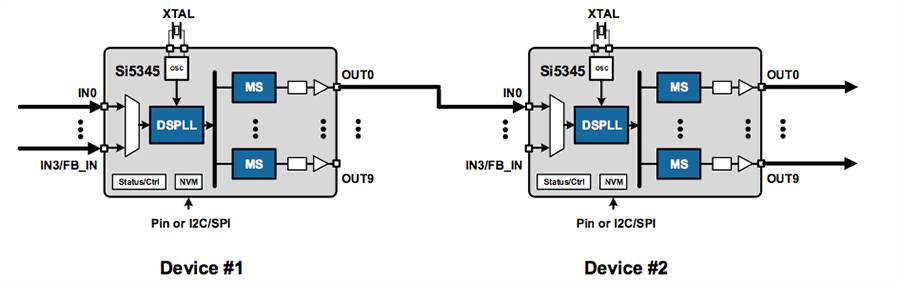
考虑下图中的两个抖动衰减器时钟IC级联的图示。这可能用于额外的抖动衰减或优化频率的计划和分配。为了说明,这些设备被描绘为非常简化的Si5345框图。在该图中,IN0和IN3提供给设备#1两个输入时钟。
在典型的应用中,一个时钟可以被认为是“主”时钟,另一个被认为是“辅助”时钟。主时钟可能会从网络数据恢复,而辅助时钟则依赖本地振荡器。如果主时钟故障或被LOS或OOF取消资格,则时钟芯片切换到辅助时钟。这通常旨在使“下游”设备保持运行。如果主时钟返回并且有效,那么根据所选择的选项,时钟IC可能会还原到它。
这里的推测是,只要这两个时钟中的任何一个存在,则在OUT0处产生有效的锁定模式时钟,从而向下游设备#2提供输入时钟。实际上,如果设备#1的两个输入时钟都丢失,则设备可以进入保持模式,如上所述,甚至是自由模式,并且仍然产生临时合理的输出时钟。
时钟配置
在标准应用中,下行时钟不反馈到上行时钟输入。相反,它们通常是上游独立稳定或数据导出时钟的缩放或抖动衰减版本。
但是如果我们尝试了如下图2所示的配置怎么办?在这种情况下,下游设备#2的输出之一被反馈到上游设备#1。这可能是作为临时的备份时钟。
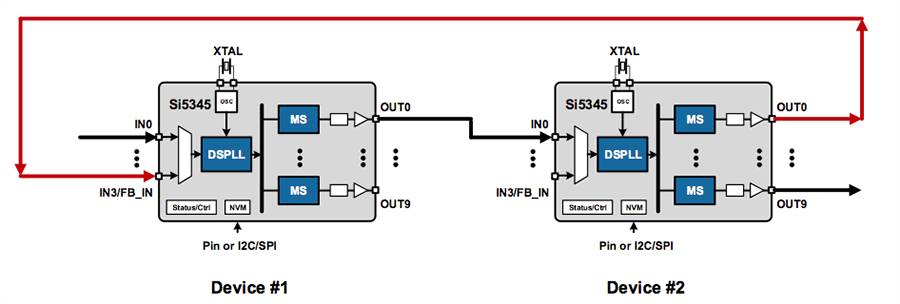
现在如下图3所示,当我们失去主时钟IN0时会发生什么?辅助或备用时钟IN3至设备#1依赖于设备#2的输出。请注意,这只是Device#1输出的锁定版本。我们通常不会看到这种与一个设备的连接,但偶尔提出涉及2个设备的应用程序。
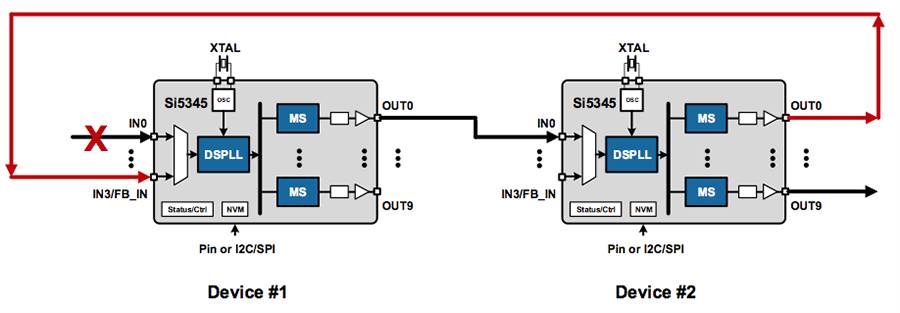
这是Ouroboros时钟配置。(是的,它听起来就像生活大爆炸的台词。)Ouroborus时钟配置的命名,是应为它的反馈类似于蛇追逐(或咬)它的尾巴的神话符号。根据维基百科,这个词来自希腊语“ourá”和“bóros”,用于描述“吞噬或吞咽”。见图4中的图示。它是古代的循环无穷符号,适用于此应用。
Gedanken
我们考虑一个简单的gedanken实验,由一个基本的PLL组成。然后假设它已经成功地被放置在Ouroboros配置中,如下面的图5所示。
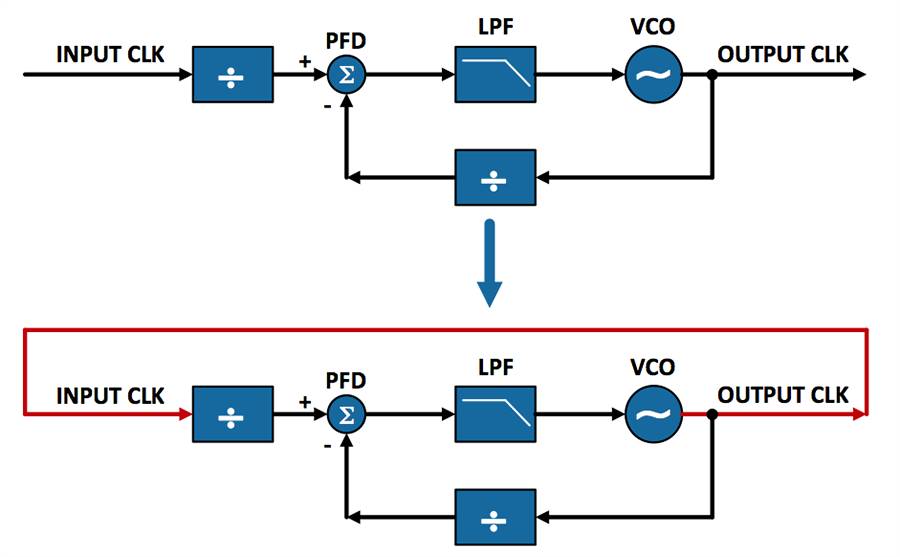
现在我们可以考虑可能的后果。如果一切都是理想的,并且没有PFD(相位检波器)错误输出,则情况至少是稍微稳定的。然而,即使忽略环路噪声,很可能在实际的PLL中,在PFD( )和PFD( - )之间呈现的时钟之间存在固定的相位偏移。在正常的PLL操作中,可以调节VCO,以便将输出时钟频率和相位锁定到独立的输入时钟。在Ouroboros配置中,VCO无法减少相位误差。
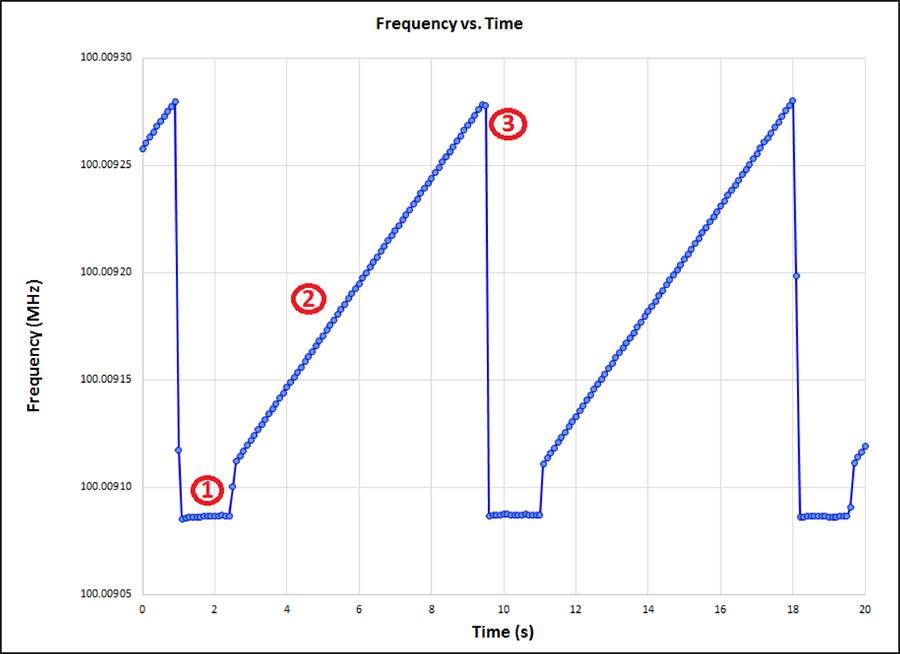
假设输出时钟以相位快速测量,在PFD( )对PFD( - )下。然后,环路将通过将VCO调谐到更高的频率来尝试跟踪。但相对相位差仍然存在。因此,循环将继续尝试校正所测量的相位误差,直到VCO以其最高频率“固定”为止。注意,为了推广,可以根据相位差的极性将VCO调谐到更高或更低的频率。最重要的是,PFD可以看到导致失控状态的相位差。
一些基本时钟切换术语
时钟芯片通常支持基于某些限定条件(例如LOS(Loss of Signal))或OOF(Out of Frequency)的条件,从一个输入时钟切换到另一个输入时钟。以下是最常用的术语:
自由模式
基于附加晶体或其他谐振器的输出时钟,或替代外部参考时钟。输出时钟的频率稳定性,漂移和抖动特性由芯片的晶振决定,与输入时钟无关。
保持模式
输出时钟基于所选输入时钟的历史频率数据,并且在输入时钟丢失并且没有有效的备用可用时使用。通常历史数据必须在一些最短时间内被收集,以被认为是有效的。频率精度与收集的数据一样好。
锁定模式
输出时钟频率和相位锁定到所选择的输入时钟,即正常操作。
标准输入时钟切换配置
考虑下图中的两个抖动衰减器时钟IC级联的图示。这可能用于额外的抖动衰减或优化频率的计划和分配。为了说明,这些设备被描绘为非常简化的Si5345框图。在该图中,IN0和IN3提供给设备#1两个输入时钟。
在典型的应用中,一个时钟可以被认为是“主”时钟,另一个被认为是“辅助”时钟。主时钟可能会从网络数据恢复,而辅助时钟则依赖本地振荡器。如果主时钟故障或被LOS或OOF取消资格,则时钟芯片切换到辅助时钟。这通常旨在使“下游”设备保持运行。如果主时钟返回并且有效,那么根据所选择的选项,时钟IC可能会还原到它。
这里的推测是,只要这两个时钟中的任何一个存在,则在OUT0处产生有效的锁定模式时钟,从而向下游设备#2提供输入时钟。实际上,如果设备#1的两个输入时钟都丢失,则设备可以进入保持模式,如上所述,甚至是自由模式,并且仍然产生临时合理的输出时钟。
时钟配置
在标准应用中,下行时钟不反馈到上行时钟输入。相反,它们通常是上游独立稳定或数据导出时钟的缩放或抖动衰减版本。
但是如果我们尝试了如下图2所示的配置怎么办?在这种情况下,下游设备#2的输出之一被反馈到上游设备#1。这可能是作为临时的备份时钟。
现在如下图3所示,当我们失去主时钟IN0时会发生什么?辅助或备用时钟IN3至设备#1依赖于设备#2的输出。请注意,这只是Device#1输出的锁定版本。我们通常不会看到这种与一个设备的连接,但偶尔提出涉及2个设备的应用程序。
这是Ouroboros时钟配置。(是的,它听起来就像生活大爆炸的台词。)Ouroborus时钟配置的命名,是应为它的反馈类似于蛇追逐(或咬)它的尾巴的神话符号。根据维基百科,这个词来自希腊语“ourá”和“bóros”,用于描述“吞噬或吞咽”。见图4中的图示。它是古代的循环无穷符号,适用于此应用。
Gedanken
我们考虑一个简单的gedanken实验,由一个基本的PLL组成。然后假设它已经成功地被放置在Ouroboros配置中,如下面的图5所示。
现在我们可以考虑可能的后果。如果一切都是理想的,并且没有PFD(相位检波器)错误输出,则情况至少是稍微稳定的。然而,即使忽略环路噪声,很可能在实际的PLL中,在PFD( )和PFD( - )之间呈现的时钟之间存在固定的相位偏移。在正常的PLL操作中,可以调节VCO,以便将输出时钟频率和相位锁定到独立的输入时钟。在Ouroboros配置中,VCO无法减少相位误差。
假设输出时钟以相位快速测量,在PFD( )对PFD( - )下。然后,环路将通过将VCO调谐到更高的频率来尝试跟踪。但相对相位差仍然存在。因此,循环将继续尝试校正所测量的相位误差,直到VCO以其最高频率“固定”为止。注意,为了推广,可以根据相位差的极性将VCO调谐到更高或更低的频率。最重要的是,PFD可以看到导致失控状态的相位差。

 举报
举报