无人驾驶汽车关键技术
无人驾驶汽车是未来汽车发展的方向,是各种顶尖科技成果为一体的智慧型汽车。就目前发展现状来看,还有以下几个方面的技术OTR需取得突破。
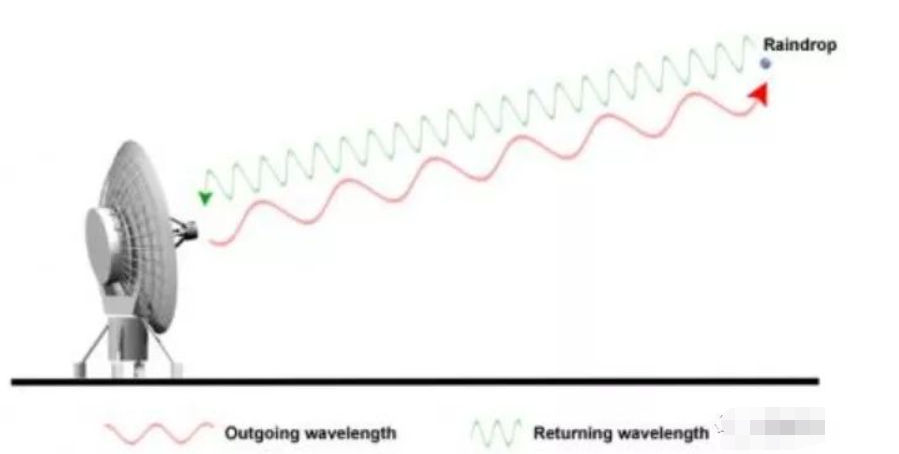
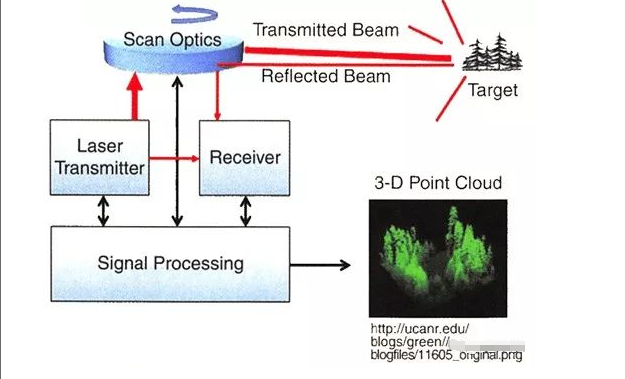
1、传感器技术
现在无人车能出现很大程度上依赖传感器的进步。现在的无人驾驶汽车采用激光雷达,直接感知路面状况,用于分析计算。
2、定位
目前主要的定位系统中美国的GPS应用最为广泛,技术也较为成熟,但目前民用的GPS定位精度远达不到无人车的需求,GPS官方民用定位精度“《10 m”,更高精度的GPS基本要依靠差分完成。差分的原理很简单:设置一个固定基站,固定基站校准位置,再将信号传递给车载设备,车载设备在接收到基站信号和GPS信号后差分获得。但是每一个基站的有效范围也就30 km。于是有很多技术要解决GPS精度不足的问题,如地图匹配。
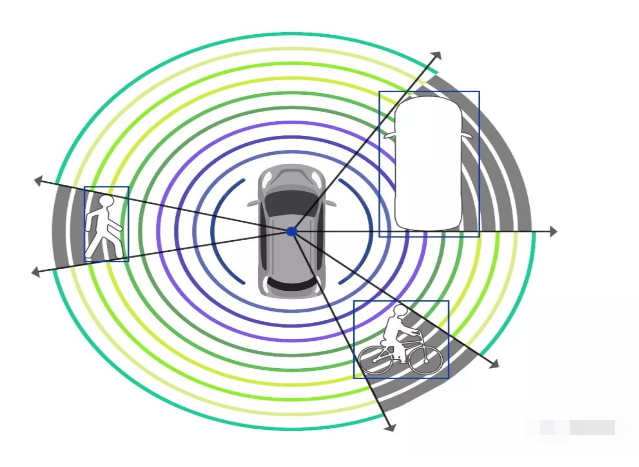
3、避障
车辆前方有障碍,障碍物是运动的还是静止的,车是停下来还是绕过去。这部分主要的难度是从传感器识别障碍,在车辆运动的前提下,确定障碍的运动状态。也就是说你要在运动的坐标系下,计算另一个物体相对静坐标系的速度,并作出判断。
4、识别
人能轻易识别出道路上的交通标识,如限速牌、红绿灯,同时作出相应的反应,但这对于机器来说是一个困难的挑战。目前的机器视觉技术还难以识别像树木、行人、动物等物体。这些物体的识别都要通过视觉系统完成。在无人车上不但需要能在有限的时间里识别出来,并且还要考虑道路中可能有的光线变化、遮挡等问题。要完善解决这些问题,还需要等待机器视觉和图像识别领域的技术突破。
5、控制
除了上面的避障以外,其他外围机构的改造可能会存在一些改造上的问题。如何介入转向架、如何介入油门。这部分技术的难度较小,汽车控制技术如今已比较成熟,而无人驾驶汽车在未来基本为纯电动汽车,在控制难度上将小于传统的内燃机汽车。
无人驾驶汽车关键技术
无人驾驶汽车是未来汽车发展的方向,是各种顶尖科技成果为一体的智慧型汽车。就目前发展现状来看,还有以下几个方面的技术OTR需取得突破。
1、传感器技术
现在无人车能出现很大程度上依赖传感器的进步。现在的无人驾驶汽车采用激光雷达,直接感知路面状况,用于分析计算。
2、定位
目前主要的定位系统中美国的GPS应用最为广泛,技术也较为成熟,但目前民用的GPS定位精度远达不到无人车的需求,GPS官方民用定位精度“《10 m”,更高精度的GPS基本要依靠差分完成。差分的原理很简单:设置一个固定基站,固定基站校准位置,再将信号传递给车载设备,车载设备在接收到基站信号和GPS信号后差分获得。但是每一个基站的有效范围也就30 km。于是有很多技术要解决GPS精度不足的问题,如地图匹配。
3、避障
车辆前方有障碍,障碍物是运动的还是静止的,车是停下来还是绕过去。这部分主要的难度是从传感器识别障碍,在车辆运动的前提下,确定障碍的运动状态。也就是说你要在运动的坐标系下,计算另一个物体相对静坐标系的速度,并作出判断。
4、识别
人能轻易识别出道路上的交通标识,如限速牌、红绿灯,同时作出相应的反应,但这对于机器来说是一个困难的挑战。目前的机器视觉技术还难以识别像树木、行人、动物等物体。这些物体的识别都要通过视觉系统完成。在无人车上不但需要能在有限的时间里识别出来,并且还要考虑道路中可能有的光线变化、遮挡等问题。要完善解决这些问题,还需要等待机器视觉和图像识别领域的技术突破。
5、控制
除了上面的避障以外,其他外围机构的改造可能会存在一些改造上的问题。如何介入转向架、如何介入油门。这部分技术的难度较小,汽车控制技术如今已比较成熟,而无人驾驶汽车在未来基本为纯电动汽车,在控制难度上将小于传统的内燃机汽车。

 举报
举报