卷积神经网络的层级结构
• 数据输入层/ Input layer
• 卷积计算层/ CONV layer
• ReLU激励层 / ReLU layer
• 池化层 / Pooling layer
• 全连接层 / FC layer
1.数据输入层
该层要做的处理主要是对原始图像数据进行预处理,其中包括:
• 去均值:把输入数据各个维度都中心化为0,如下图所示,其目的就是把样本的中心拉回到坐标系原点上。
• 归一化:幅度归一化到同样的范围,如下所示,即减少各维度数据取值范围的差异而带来的干扰,比如,我们有两个维度的特征A和B,A范围是0到10,而B范围是0到10000,如果直接使用这两个特征是有问题的,好的做法就是归一化,即A和B的数据都变为0到1的范围。
• PCA/白化:用PCA降维;白化是对数据各个特征轴上的幅度归一化
去均值与归一化效果图:

去相关与白化效果图:

2.卷积计算层
这一层就是卷积神经网络最重要的一个层次,也是“卷积神经网络”的名字来源。
在这个卷积层,有两个关键操作:
• 局部关联。每个神经元看做一个滤波器(filter)
• 窗口(receptive field)滑动, filter对局部数据计算
先介绍卷积层遇到的几个名词:
• 深度/depth(解释见下图)
• 步长/stride (窗口一次滑动的长度)
• 填充值/zero-padding

填充值是什么呢?以下图为例子,比如有这么一个5*5的图片(一个格子一个像素),我们滑动窗口取2*2,步长取2,那么我们发现还剩下1个像素没法滑完,那怎么办呢?

那我们在原先的矩阵加了一层填充值,使得变成6*6的矩阵,那么窗口就可以刚好把所有像素遍历完。这就是填充值的作用。

卷积的计算(注意,下面蓝色矩阵周围有一圈灰色的框,那些就是上面所说到的填充值)

这里的蓝色矩阵就是输入的图像,粉色矩阵就是卷积层的神经元,这里表示了有两个神经元(w0,w1)。绿色矩阵就是经过卷积运算后的输出矩阵,这里的步长设置为2。
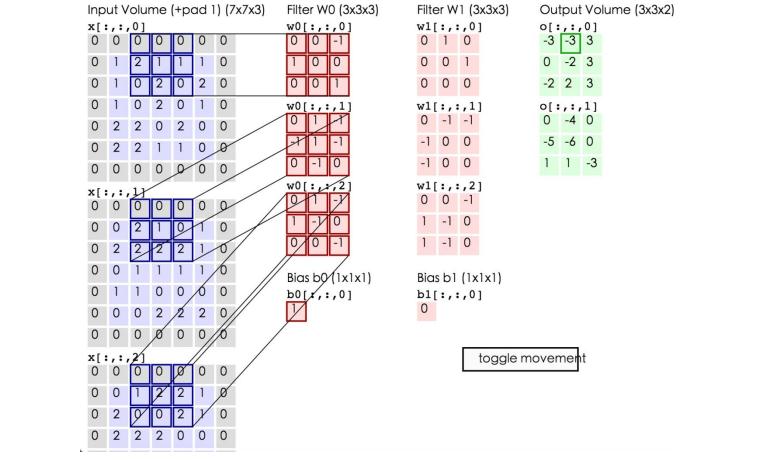
蓝色的矩阵(输入图像)对粉色的矩阵(filter)进行矩阵内积计算并将三个内积运算的结果与偏置值b相加(比如上面图的计算:2+(-2+1-2)+(1-2-2) + 1= 2 - 3 - 3 + 1 = -3),计算后的值就是绿框矩阵的一个元素。

下面的动态图形象地展示了卷积层的计算过程:

参数共享机制
• 在卷积层中每个神经元连接数据窗的权重是固定的,每个神经元只关注一个特性。神经元就是图像处理中的滤波器,比如边缘检测专用的Sobel滤波器,即卷积层的每个滤波器都会有自己所关注一个图像特征,比如垂直边缘,水平边缘,颜色,纹理等等,这些所有神经元加起来就好比就是整张图像的特征提取器集合。
• 需要估算的权重个数减少: AlexNet 1亿 =》 3.5w
• 一组固定的权重和不同窗口内数据做内积: 卷积

3.激励层
把卷积层输出结果做非线性映射。

CNN采用的激励函数一般为ReLU(The Rectified Linear Unit/修正线性单元),它的特点是收敛快,求梯度简单,但较脆弱,图像如下。

激励层的实践经验:
①不要用sigmoid!不要用sigmoid!不要用sigmoid!
② 首先试RELU,因为快,但要小心点
③ 如果2失效,请用Leaky ReLU或者Maxout
④ 某些情况下tanh倒是有不错的结果,但是很少
4.池化层
池化层夹在连续的卷积层中间, 用于压缩数据和参数的量,减小过拟合。
简而言之,如果输入是图像的话,那么池化层的最主要作用就是压缩图像。
这里再展开叙述池化层的具体作用。
1. 特征不变性,也就是我们在图像处理中经常提到的特征的尺度不变性,池化操作就是图像的resize,平时一张狗的图像被缩小了一倍我们还能认出这是一张狗的照片,这说明这张图像中仍保留着狗最重要的特征,我们一看就能判断图像中画的是一只狗,图像压缩时去掉的信息只是一些无关紧要的信息,而留下的信息则是具有尺度不变性的特征,是最能表达图像的特征。
2. 特征降维,我们知道一幅图像含有的信息是很大的,特征也很多,但是有些信息对于我们做图像任务时没有太多用途或者有重复,我们可以把这类冗余信息去除,把最重要的特征抽取出来,这也是池化操作的一大作用。
3. 在一定程度上防止过拟合,更方便优化。

池化层用的方法有Max pooling 和 average pooling,而实际用的较多的是Max pooling。
这里就说一下Max pooling,其实思想非常简单。

对于每个2*2的窗口选出最大的数作为输出矩阵的相应元素的值,比如输入矩阵第一个2*2窗口中最大的数是6,那么输出矩阵的第一个元素就是6,如此类推。
5.全连接层
两层之间所有神经元都有权重连接,通常全连接层在卷积神经网络尾部。也就是跟传统的神经网络神经元的连接方式是一样的:

卷积神经网络的层级结构
• 数据输入层/ Input layer
• 卷积计算层/ CONV layer
• ReLU激励层 / ReLU layer
• 池化层 / Pooling layer
• 全连接层 / FC layer
1.数据输入层
该层要做的处理主要是对原始图像数据进行预处理,其中包括:
• 去均值:把输入数据各个维度都中心化为0,如下图所示,其目的就是把样本的中心拉回到坐标系原点上。
• 归一化:幅度归一化到同样的范围,如下所示,即减少各维度数据取值范围的差异而带来的干扰,比如,我们有两个维度的特征A和B,A范围是0到10,而B范围是0到10000,如果直接使用这两个特征是有问题的,好的做法就是归一化,即A和B的数据都变为0到1的范围。
• PCA/白化:用PCA降维;白化是对数据各个特征轴上的幅度归一化
去均值与归一化效果图:
去相关与白化效果图:
2.卷积计算层
这一层就是卷积神经网络最重要的一个层次,也是“卷积神经网络”的名字来源。
在这个卷积层,有两个关键操作:
• 局部关联。每个神经元看做一个滤波器(filter)
• 窗口(receptive field)滑动, filter对局部数据计算
先介绍卷积层遇到的几个名词:
• 深度/depth(解释见下图)
• 步长/stride (窗口一次滑动的长度)
• 填充值/zero-padding
填充值是什么呢?以下图为例子,比如有这么一个5*5的图片(一个格子一个像素),我们滑动窗口取2*2,步长取2,那么我们发现还剩下1个像素没法滑完,那怎么办呢?
那我们在原先的矩阵加了一层填充值,使得变成6*6的矩阵,那么窗口就可以刚好把所有像素遍历完。这就是填充值的作用。
卷积的计算(注意,下面蓝色矩阵周围有一圈灰色的框,那些就是上面所说到的填充值)
这里的蓝色矩阵就是输入的图像,粉色矩阵就是卷积层的神经元,这里表示了有两个神经元(w0,w1)。绿色矩阵就是经过卷积运算后的输出矩阵,这里的步长设置为2。
蓝色的矩阵(输入图像)对粉色的矩阵(filter)进行矩阵内积计算并将三个内积运算的结果与偏置值b相加(比如上面图的计算:2+(-2+1-2)+(1-2-2) + 1= 2 - 3 - 3 + 1 = -3),计算后的值就是绿框矩阵的一个元素。
下面的动态图形象地展示了卷积层的计算过程:
参数共享机制
• 在卷积层中每个神经元连接数据窗的权重是固定的,每个神经元只关注一个特性。神经元就是图像处理中的滤波器,比如边缘检测专用的Sobel滤波器,即卷积层的每个滤波器都会有自己所关注一个图像特征,比如垂直边缘,水平边缘,颜色,纹理等等,这些所有神经元加起来就好比就是整张图像的特征提取器集合。
• 需要估算的权重个数减少: AlexNet 1亿 =》 3.5w
• 一组固定的权重和不同窗口内数据做内积: 卷积
3.激励层
把卷积层输出结果做非线性映射。
CNN采用的激励函数一般为ReLU(The Rectified Linear Unit/修正线性单元),它的特点是收敛快,求梯度简单,但较脆弱,图像如下。
激励层的实践经验:
①不要用sigmoid!不要用sigmoid!不要用sigmoid!
② 首先试RELU,因为快,但要小心点
③ 如果2失效,请用Leaky ReLU或者Maxout
④ 某些情况下tanh倒是有不错的结果,但是很少
4.池化层
池化层夹在连续的卷积层中间, 用于压缩数据和参数的量,减小过拟合。
简而言之,如果输入是图像的话,那么池化层的最主要作用就是压缩图像。
这里再展开叙述池化层的具体作用。
1. 特征不变性,也就是我们在图像处理中经常提到的特征的尺度不变性,池化操作就是图像的resize,平时一张狗的图像被缩小了一倍我们还能认出这是一张狗的照片,这说明这张图像中仍保留着狗最重要的特征,我们一看就能判断图像中画的是一只狗,图像压缩时去掉的信息只是一些无关紧要的信息,而留下的信息则是具有尺度不变性的特征,是最能表达图像的特征。
2. 特征降维,我们知道一幅图像含有的信息是很大的,特征也很多,但是有些信息对于我们做图像任务时没有太多用途或者有重复,我们可以把这类冗余信息去除,把最重要的特征抽取出来,这也是池化操作的一大作用。
3. 在一定程度上防止过拟合,更方便优化。
池化层用的方法有Max pooling 和 average pooling,而实际用的较多的是Max pooling。
这里就说一下Max pooling,其实思想非常简单。
对于每个2*2的窗口选出最大的数作为输出矩阵的相应元素的值,比如输入矩阵第一个2*2窗口中最大的数是6,那么输出矩阵的第一个元素就是6,如此类推。
5.全连接层
两层之间所有神经元都有权重连接,通常全连接层在卷积神经网络尾部。也就是跟传统的神经网络神经元的连接方式是一样的:

 举报
举报






