存在传感器
现在,数项存在传感器技术正被集成到当今的机器人中,它们的数据会融合在一起,用于为机器人提供空间视觉感知以及物体检测和避让。2D 和 3D 视觉立体摄像头在当今的新型消费和专业服务机器人中都很常见。然而,新型的先进传感器技术,如包括基于飞行时间的光检测和测距(LiDAR)传感器,也越来越多地部署到机器人当中。LiDAR 为机器人提供其工作空间及周围环境的高分辨率 3D 测绘,以便它可以更好地执行任务并四处移动。参见图 3。
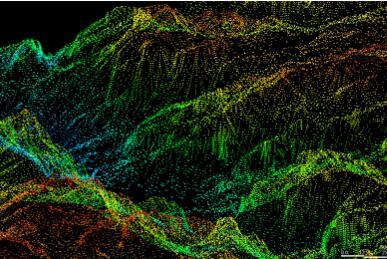
图 3 LiDAR 测绘
同样,超声波传感器也正被用于存在感测。与用于汽车倒车时的安全报警系统传感器相同,机器人中的超声波传感器用于检测附近的障碍物,以防撞到墙壁、物体、其他机器人和人。另外,它们可以在机器人执行主要功能任务时发挥作用。因此,超声波传感器在近场导航和避障中起着重要作用,最终提高了机器人的整体性能和安全性。
但是,超声波传感器的作用距离有限,大约为一厘米到几米,而最大角度锥体约为 30 度。它们的成本相对较低,并在近距离范围内具有较高的精度,但随着距离和测量角度的增加,其精度会下降。它们也易受温度和压力变化的影响,还会受到使用调谐在相同频率的其他机器人的超声波传感器的干扰。尽管如此,当与其他存在传感器结合使用时,它们还是可以提供实用可靠的位置信息。
当所有这些存在传感器(2D/3D 摄像头、LiDAR 和超声波)数据融合在一起时,正如我们现在开始在高端消费/专业服务机器人和工业机器人中所看到的,这些机器人能够出色地实现对周围环境空间感知,移动并执行更复杂的任务,而且不会令自己、人或其周围环境受到损害。
存在传感器
现在,数项存在传感器技术正被集成到当今的机器人中,它们的数据会融合在一起,用于为机器人提供空间视觉感知以及物体检测和避让。2D 和 3D 视觉立体摄像头在当今的新型消费和专业服务机器人中都很常见。然而,新型的先进传感器技术,如包括基于飞行时间的光检测和测距(LiDAR)传感器,也越来越多地部署到机器人当中。LiDAR 为机器人提供其工作空间及周围环境的高分辨率 3D 测绘,以便它可以更好地执行任务并四处移动。参见图 3。
图 3 LiDAR 测绘
同样,超声波传感器也正被用于存在感测。与用于汽车倒车时的安全报警系统传感器相同,机器人中的超声波传感器用于检测附近的障碍物,以防撞到墙壁、物体、其他机器人和人。另外,它们可以在机器人执行主要功能任务时发挥作用。因此,超声波传感器在近场导航和避障中起着重要作用,最终提高了机器人的整体性能和安全性。
但是,超声波传感器的作用距离有限,大约为一厘米到几米,而最大角度锥体约为 30 度。它们的成本相对较低,并在近距离范围内具有较高的精度,但随着距离和测量角度的增加,其精度会下降。它们也易受温度和压力变化的影响,还会受到使用调谐在相同频率的其他机器人的超声波传感器的干扰。尽管如此,当与其他存在传感器结合使用时,它们还是可以提供实用可靠的位置信息。
当所有这些存在传感器(2D/3D 摄像头、LiDAR 和超声波)数据融合在一起时,正如我们现在开始在高端消费/专业服务机器人和工业机器人中所看到的,这些机器人能够出色地实现对周围环境空间感知,移动并执行更复杂的任务,而且不会令自己、人或其周围环境受到损害。

 举报
举报