| PUSHPL | 驱动器模式 | IN_ | OUT_状态 |
| 0 | 高边 | 0 | 高边驱动器关闭/高阻态 |
| 0 | 高边 | 1 | 高边驱动器打开/输出高电平 |
| 1 | 推挽式 | 0 | 输出低电平 |
| 1 | 推挽式 | 1 | 输出高电平 |
| 引脚 | 配置 | |||||||
| SPI模式 | SRIAL | CMND/IN2 | CNFG/IN7 | S16/IN8 | BITS | SDI | SDO | 注释 |
| 1 | 0 | 1 | 0 | 8 | 各通道故障 | OUT由SPI设置。FAULT为故障的实时状态(驱动器关断或负载开路) | ||
| 1 | 16 | 各通道故障和电平 | ||||||
| 1 | 0 | 1 | 0 | 8 | 各通道故障 | OUT电平不变化 | ||
| 1 | 16 | 各通道故障和电平 | ||||||
| 1 | 1 | X | X | 16 | 之前的命令输出 | OUT电平可能变化或不变化,取决于命令 | ||
| 0 | X | X | X | 16 | 之前的命令输出 | OUT由INx引脚输出。MAX14912允许SPI配置;MAX14913不允许SPI配置。 | ||
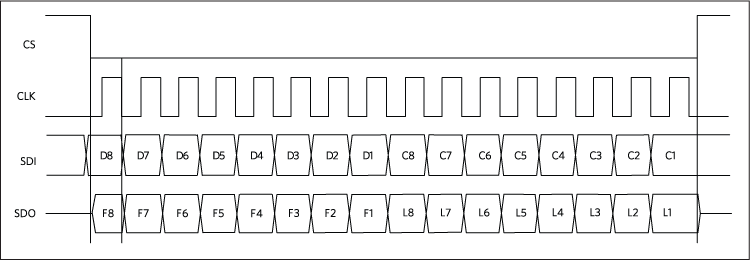 图1. 16位直接SPI模式下的SPI周期。
图1. 16位直接SPI模式下的SPI周期。| 位 | 位值 | CNFG/IN7 | 定义 |
| D_ | 0 | 低 | 高边模式:HS关闭,LS关闭 推挽模式:HS关闭,LS打开 |
| 1 | 低 | HS打开,LS关闭 | |
| C_ | 0 | 低 | 高边模式 |
| 1 | 低 | 推挽模式 | |
| D_C- | 00 | 高 | 高边模式;负载开路检测由OL/IN1引脚定义 |
| 01 | 高 | 高边模式,带负载开路检测 | |
| 10 | 高 | 推挽模式 | |
| 11 | 高 | 未使用 | |
| 00 | 低 | 高边模式:HS打开,LS关闭 | |
| 10 | 低 | 高边模式:HS打开,LS关闭 | |
| 01 | 低 | 推挽模式:HS关闭,LS打开 | |
| 11 | 低 | 推挽模式:HS关闭,LS打开 | |
| F_ | 0 | X | 无故障 |
| 1 | X | 故障状态(热保护或负载开路) | |
| L_ | 0 | 0 | 输出电平 < 7V |
| 1 | 0 | 输出电平 > 7V | |
| 0 | 1 | 禁止慢速模式 | |
| 1 | 1 | 禁止慢速模式 |
| COMMAND # | 功能 | DI 命令 | 数据 | DO 在下一周期有效 | 注释 |
| 0 | 设置OUT状态(寄存器0) | Z0000000 | DDDDDDDD | FFFFFFFF.LLLLLLLL | D = 0:HS关闭;LS打开(PP模式) D = 1:HS打开; LS关闭 L:输出电平或慢速模式 (CNFG = 1) F:故障(实时) Z = 1:清除默认寄存器 |
| 1 | 设置HS/PP模式(寄存器1) | Z0000001 | DDDDDDDD | FFFFFFFF.LLLLLLLL | D = 0:HS模式 D = 1:PP模式 |
| 2 | 设置OL检测(寄存器2) | Z0000010 | DDDDDDDD | FFFFFFFF.LLLLLLLL | D = 0:OL检测关闭 D = 1:OL检测打开(HS模式) |
| 3 | 设置配置(寄存器3) | Z0000011 | 000SJJAV | FFFFFFFF.LLLLLLLL | AB:看门狗,00 = 0.90s,01 = 0.45s,10 = 0.15s J = 1:通道组合(禁止PP) S = 1:FAULT未触发 检测到短路 |
| 4 | 读寄存器 | Z0100000 | 00000NNN | AAAAAAAA.QQQQQQQQ | NNN = 0、1、2、3:Q = 寄存器值,A = 0 NNN = 4、5、6:Q = 寄存器值, A = 实时故障状态 NNN = 7:Q = 0,A = 实时 |
| 5 | 读取实时状态 | Z0110000 | 00000000 | FFFFFFFF.LLLLLLLL | F-L状态读取(实时)。 无数据写入。 |
| 寄存器 | 读/写 | 作用 | 7 | 6 | 5 | 4 | 3 | 2 | 1 | 0 |
| 0 | R/W | 驱动器设置 | IN8 | IN7 | IN6 | IN5 | IN4 | IN3 | IN2 | IN1 |
| 1 | R/W | 推挽/高边配置 | PP8 | PP7 | PP6 | PP5 | PP4 | PP3 | PP2 | PP1 |
| 2 | R/W | R/W负载开路检测使能 | OL_EN8 | OL_EN7 | OL_EN6 | OL_EN5 | OL_EN4 | OL_EN3 | OL_EN2 | OL_EN1 |
| 3 | R/W | 看门狗配置和通道并联 | X | X | X | Short-circuit Pulse OFF | joinUP | joinDW | WD1 | WD0 |
| 4 | R | 各通道负载开路状态 | OL8 | OL7 | OL6 | OL5 | OL4 | OL3 | OL2 | OL1 |
| 5 | R | 各通道热关断 | THSD8 | THSD7 | THSD6 | THSD5 | THSD4 | THSD3 | THSD2 | THSD1 |
| 6 | R | 全局故障 | WDfault | CRCfault | DCDC Current Limit | 8CLKmult Error | THSDglob | 5V UVLO | VDD UVLO | VDD WARN |
| 7 | R | OUT过压检测或慢速模式 | OV8 | OV7 | OV6 | OV5 | OV4 | OV3 | OV2 | OV1 |
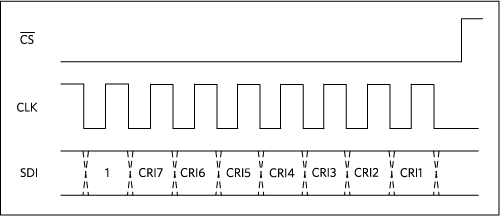 图2. 微控制器应提供SDI校验字节
图2. 微控制器应提供SDI校验字节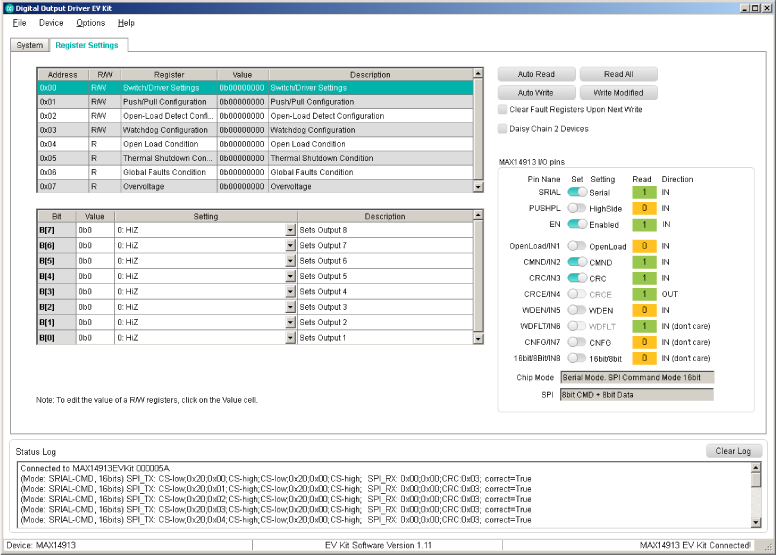 图3. 数字输出驱动器GUI中的CRC计算。
图3. 数字输出驱动器GUI中的CRC计算。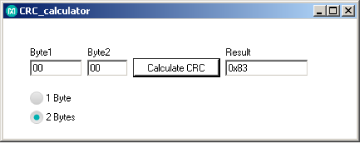 图4. CRC计算器弹出式窗口。
图4. CRC计算器弹出式窗口。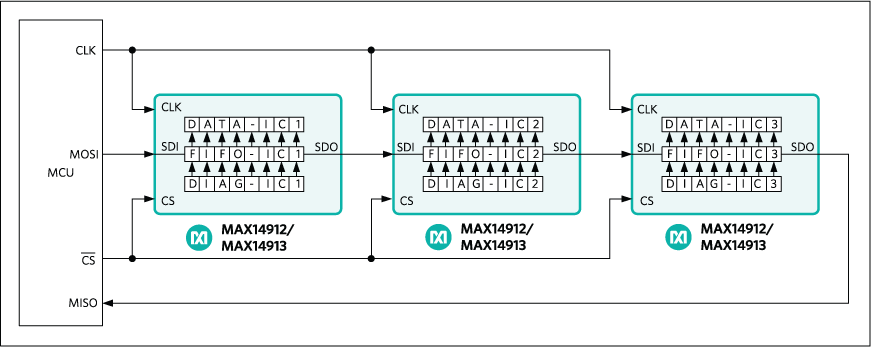 图5. 菊链连接。
图5. 菊链连接。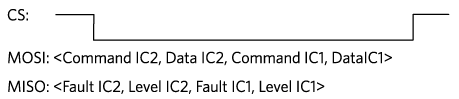
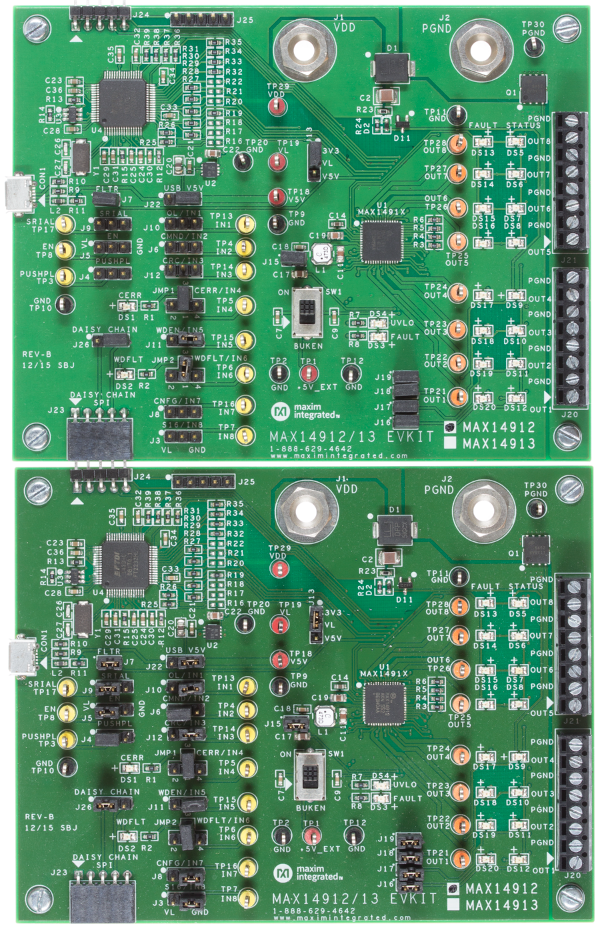 图6. 菊链连接的MAX14912EVKIT。
图6. 菊链连接的MAX14912EVKIT。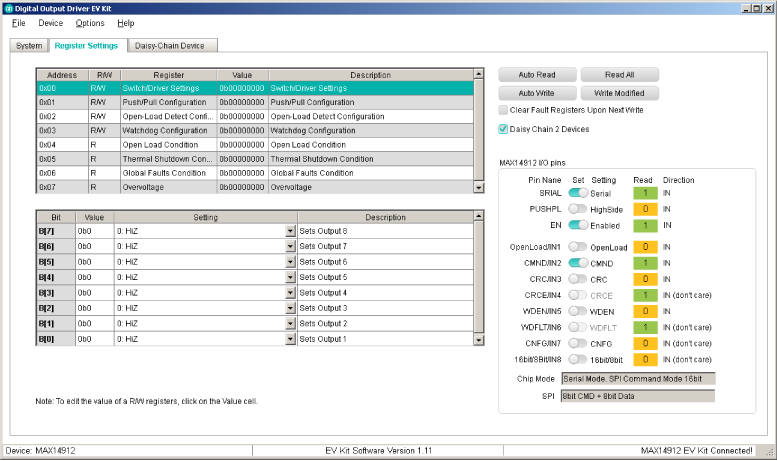 图7. 菊链操作。
图7. 菊链操作。
 举报
举报
举报
举报
举报
举报
举报
举报
更多回帖

