传感器开发平台
登录
直播中
李瑜刈
8年用户
171经验值
私信
关注
CMOS图像传感器解析
开启该帖子的消息推送
CMOS图像传感器
自动驾驶
信号处理
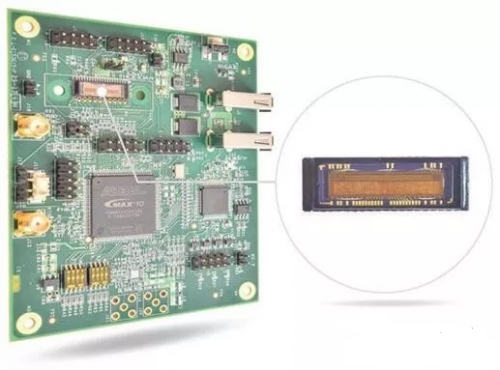
Newsight Imaging首款专为近距离LiDAR应用而设计的CMOS图像传感器NSI3000及
电路
板,现已量产供货。
回帖
(1)
萧昕腾
2020-8-17 14:37:48
据报道,LiDAR(激光雷达)和光谱分析应用的先进CMOS图像传感器开发商——以色列Newsight Imaging,本月中旬在底特律AutoSens展会上介绍了为什么该公司的CMOS图像传感器解决方案能成为自动驾驶汽车LiDAR传感器的理想选择。该公司近期刚刚宣布通过TowerJazz位于以色列的代工厂,采用TowerJazz先进的180nm技术,实现了其CMOS图像传感器的大规模量产。
当前,汽车LiDAR系统所面临的技术挑战主要包括:远距离、小尺寸及透明物体的探测;远距离探测的分辨率;近距离及远距离的高精度探测;避免阳光或其它光源的致盲;以及精确的时序控制。当然,市场还希望LiDAR系统能够兼具低功耗、无运动部件且低成本。
因此,机械旋转式LiDAR和含有运动部件的MEMS技术方案,都在努力满足严苛的车规要求,尤其是面对未来先进的自动驾驶。目前LiDAR系统中采用的传感器(如SPAD单光子雪崩二极管)能够实现远距离探测。但是,它们的分辨率有限,并且很难满足汽车应用在200米距离,以至少20像素的分辨率识别行人的要求。
Newsight Imaging的增强型飞行时间(eToF,enhanced TIme-oF-Flight)技术正是为解决上述所有问题而设计的完整的CMOS解决方案。eToF是一种不含任何运动部件的3D固态器件。它内建多合一CMOS芯片,将探测、逻辑芯片、处理和数字输出全部集成在一颗高灵敏度、小尺寸、低成本的单芯片上。
其eToF技术增强了脉冲间接飞行时间距离传感方案。在脉冲间接飞行时间测量中,物体的距离,是通过距离选通法进行感知和探测的。其返回信号脉冲的距离信息被为两部分。
如上图所示,返回信号被与发射信号对准的第一窗口(1st Window)捕获,获得一部分返回信号的积分,标记为“A”;紧接着,返回信号再次被与发射信号末端对准的第二窗口(2nd Window)捕获,获得另一部分返回信号的积分,标记为“B”。然后通过计算A和B值的比值来算得距离信息,计算公式为d=0.5*c*t*[B/(A+B)],其中c为光速,t为发射信号的宽度。
非常重要的是,A和B值测量了反射光的强度,因此每次反射光的捕捉形成了完整的成像。
eToF增强脉冲间接飞行时间测量法,主要依赖以下几点:
- 增强的动态范围;
- 近距离和远距离的高精度探测;
- 避免外部光源致盲;
- 以及数字脉冲时序控制。
增强的动态范围,旨在满足远距离探测微弱信号且不会由于近距离高反射物体而引起饱和的挑战,同时还能捕获必要的信息以获得足够的分辨率。在Newsight Imaging的方案中,信号的处理在模拟域中完成。这意味着数据经过压缩和量化,而不会丢失任何累积信息,并且使用了标准的处理工具。其结果是显著放大的微弱信号,以及由此得到的高信噪比,从而获得远距离探测所需要的高分辨率。
通过各种脉冲宽度和支持算法间的切换,获得近距离和远距离的高精度探测,能够以合适的性能和良好的分辨率,覆盖近距离和远距离探测的运行模式。
应用独特的光学解决方案来减轻环境光和其他车辆灯光引起的致盲。并且,致盲的缓解,是在原激光器衰减最小的前提下实现的,这对LiDAR系统获得足够的性能至关重要。
数字时序控制,对于脉冲的精准发射和接收至关重要。Newsight Imaging开发了一款超紧凑、超快速的电流源脉冲激光驱动器。其对称的输出脉冲在幅度和持续时间上可以完全控制。凭借这项技术,其上升时间和下降时间仅受激光器开启延时的限制。
据报道,LiDAR(激光雷达)和光谱分析应用的先进CMOS图像传感器开发商——以色列Newsight Imaging,本月中旬在底特律AutoSens展会上介绍了为什么该公司的CMOS图像传感器解决方案能成为自动驾驶汽车LiDAR传感器的理想选择。该公司近期刚刚宣布通过TowerJazz位于以色列的代工厂,采用TowerJazz先进的180nm技术,实现了其CMOS图像传感器的大规模量产。
当前,汽车LiDAR系统所面临的技术挑战主要包括:远距离、小尺寸及透明物体的探测;远距离探测的分辨率;近距离及远距离的高精度探测;避免阳光或其它光源的致盲;以及精确的时序控制。当然,市场还希望LiDAR系统能够兼具低功耗、无运动部件且低成本。
因此,机械旋转式LiDAR和含有运动部件的MEMS技术方案,都在努力满足严苛的车规要求,尤其是面对未来先进的自动驾驶。目前LiDAR系统中采用的传感器(如SPAD单光子雪崩二极管)能够实现远距离探测。但是,它们的分辨率有限,并且很难满足汽车应用在200米距离,以至少20像素的分辨率识别行人的要求。
Newsight Imaging的增强型飞行时间(eToF,enhanced TIme-oF-Flight)技术正是为解决上述所有问题而设计的完整的CMOS解决方案。eToF是一种不含任何运动部件的3D固态器件。它内建多合一CMOS芯片,将探测、逻辑芯片、处理和数字输出全部集成在一颗高灵敏度、小尺寸、低成本的单芯片上。
其eToF技术增强了脉冲间接飞行时间距离传感方案。在脉冲间接飞行时间测量中,物体的距离,是通过距离选通法进行感知和探测的。其返回信号脉冲的距离信息被为两部分。
如上图所示,返回信号被与发射信号对准的第一窗口(1st Window)捕获,获得一部分返回信号的积分,标记为“A”;紧接着,返回信号再次被与发射信号末端对准的第二窗口(2nd Window)捕获,获得另一部分返回信号的积分,标记为“B”。然后通过计算A和B值的比值来算得距离信息,计算公式为d=0.5*c*t*[B/(A+B)],其中c为光速,t为发射信号的宽度。
非常重要的是,A和B值测量了反射光的强度,因此每次反射光的捕捉形成了完整的成像。
eToF增强脉冲间接飞行时间测量法,主要依赖以下几点:
- 增强的动态范围;
- 近距离和远距离的高精度探测;
- 避免外部光源致盲;
- 以及数字脉冲时序控制。
增强的动态范围,旨在满足远距离探测微弱信号且不会由于近距离高反射物体而引起饱和的挑战,同时还能捕获必要的信息以获得足够的分辨率。在Newsight Imaging的方案中,信号的处理在模拟域中完成。这意味着数据经过压缩和量化,而不会丢失任何累积信息,并且使用了标准的处理工具。其结果是显著放大的微弱信号,以及由此得到的高信噪比,从而获得远距离探测所需要的高分辨率。
通过各种脉冲宽度和支持算法间的切换,获得近距离和远距离的高精度探测,能够以合适的性能和良好的分辨率,覆盖近距离和远距离探测的运行模式。
应用独特的光学解决方案来减轻环境光和其他车辆灯光引起的致盲。并且,致盲的缓解,是在原激光器衰减最小的前提下实现的,这对LiDAR系统获得足够的性能至关重要。
数字时序控制,对于脉冲的精准发射和接收至关重要。Newsight Imaging开发了一款超紧凑、超快速的电流源脉冲激光驱动器。其对称的输出脉冲在幅度和持续时间上可以完全控制。凭借这项技术,其上升时间和下降时间仅受激光器开启延时的限制。
举报
更多回帖
rotate(-90deg);
回复
相关问答
CMOS图像传感器
自动驾驶
信号处理
如何去提高
CMOS
图像
传感器
的
图像
质量?
2021-04-20
4506
CMOS
有源像素
传感器
的
图像
质量怎么提高?
2019-09-04
3677
怎么实现基于
CMOS
图像
传感器
的视频采集系统设计?
2021-06-08
3930
安森美半导体
CMOS
图像
传感器
方案分享
2021-04-07
2422
请问
CMOS
是如何被用作
图像
传感器
的?
2021-03-17
1736
新型
CMOS
图像
传感器
的原理是什么?
2019-10-10
2656
CCD和
CMOS
图像
传感器
的比较
2015-09-06
15176
基于
CMOS
技术的
图像
传感器
2020-08-10
4015
CMOS
图像
传感器
的
图像
质量怎么提高?
2019-10-15
2528
用于各类摄像应用的高速
CMOS
图像
传感器
介绍
2021-06-02
2066
发帖
登录/注册
20万+
工程师都在用,
免费
PCB检查工具
无需安装、支持浏览器和手机在线查看、实时共享
查看
点击登录
登录更多精彩功能!
首页
论坛版块
小组
免费开发板试用
ebook
直播
搜索
登录
×
20
完善资料,
赚取积分



 举报
举报



