 该惯性导航模块特征:卫星+惯性导航双重组合导航定位;卫星定位技术:BDS+GPS系统联合定位;低功耗、小尺寸;无需里程计或外部速度信号;无严格安装要求,安装比较灵活;零速探测与零速修正技术;高灵敏度设计;支持 AGNSS辅助定位技术,快速定位;尺寸:16.9mm×12mm , SMD 表面贴封装;工业级标准,可以轻松应对苛刻的工作环境要求。 SKM-4DX引脚定义:
该惯性导航模块特征:卫星+惯性导航双重组合导航定位;卫星定位技术:BDS+GPS系统联合定位;低功耗、小尺寸;无需里程计或外部速度信号;无严格安装要求,安装比较灵活;零速探测与零速修正技术;高灵敏度设计;支持 AGNSS辅助定位技术,快速定位;尺寸:16.9mm×12mm , SMD 表面贴封装;工业级标准,可以轻松应对苛刻的工作环境要求。 SKM-4DX引脚定义: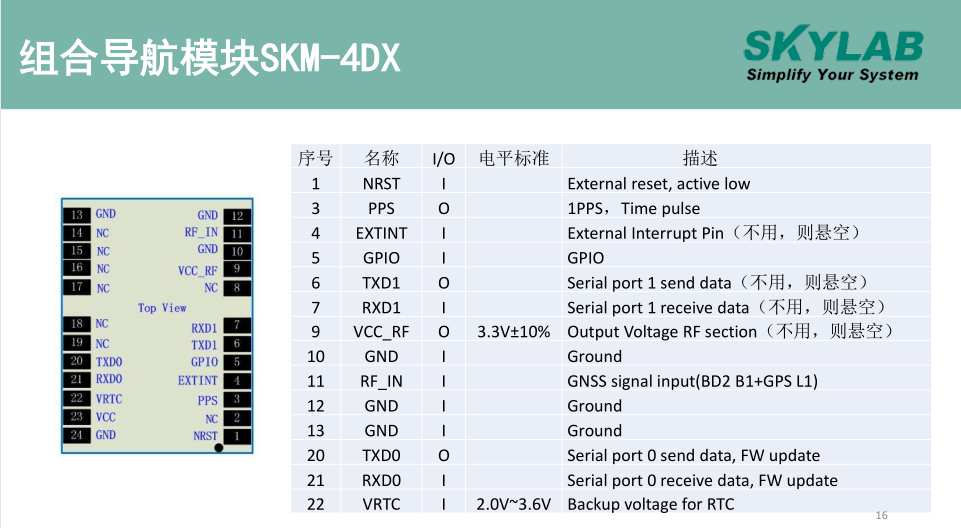 此惯性导航模块的优势:(1)摆脱里程计常规车载导航系统往往依靠里程计和陀螺仪的DR方案,实现汽车复杂环境下的高精度导航定位,里程计信号对于很多汽车后装市场而言,连接非常复杂,而且涉及汽车安全问题。经过多年的研发,在GNSS系统的信号精度降低甚至丢失卫星信号时,SKM-4DX惯性导航系统完全摆脱了对里程计依赖,仅仅利用纯惯性导航技术,也可在较长时间内单独对汽车载体进行高精度定位、测速和测姿,与市场上现有的相关产品相比,性能得到了较大地提升。(2)车辆姿态角SKM-4DX惯性导航模块利用多年对MEMS惯性器件的研究经验,通过自适应滤波算法实现了对陀螺仪漂移和加速度震动信号的滤波,并进一步可以获得高精度的姿态信息,从而可以满足坡道检测等车辆监控和导航应用的各种需求。车辆仰角、俯角可以达到30度。(3)6 轴加速度传感器惯性导航系统的硬件基础是BMI160,它将加速传感器与陀螺仪的结合于一体,具有理想的信噪比,使得组件可提供精确、可靠的测量结果。 此惯性导航模块应用:(1)用在地下公交站的准确定位和导航,比如在深圳福田交通枢纽,在公交车上应用此卫星+惯性导航模块,公交车可以在地下准确报站;(2)隧道里面提供速度校准,避免刚出隧道时非正常超速;(3)提高地下停车场的定位,结合停车场地图,可以准确寻车。(4)高端前装车辆开始追求更高精度的定位,特别是城市峡谷和高架桥下等弱信号场景。更多详情可访问天工测控或天工测控阿里店铺。
此惯性导航模块的优势:(1)摆脱里程计常规车载导航系统往往依靠里程计和陀螺仪的DR方案,实现汽车复杂环境下的高精度导航定位,里程计信号对于很多汽车后装市场而言,连接非常复杂,而且涉及汽车安全问题。经过多年的研发,在GNSS系统的信号精度降低甚至丢失卫星信号时,SKM-4DX惯性导航系统完全摆脱了对里程计依赖,仅仅利用纯惯性导航技术,也可在较长时间内单独对汽车载体进行高精度定位、测速和测姿,与市场上现有的相关产品相比,性能得到了较大地提升。(2)车辆姿态角SKM-4DX惯性导航模块利用多年对MEMS惯性器件的研究经验,通过自适应滤波算法实现了对陀螺仪漂移和加速度震动信号的滤波,并进一步可以获得高精度的姿态信息,从而可以满足坡道检测等车辆监控和导航应用的各种需求。车辆仰角、俯角可以达到30度。(3)6 轴加速度传感器惯性导航系统的硬件基础是BMI160,它将加速传感器与陀螺仪的结合于一体,具有理想的信噪比,使得组件可提供精确、可靠的测量结果。 此惯性导航模块应用:(1)用在地下公交站的准确定位和导航,比如在深圳福田交通枢纽,在公交车上应用此卫星+惯性导航模块,公交车可以在地下准确报站;(2)隧道里面提供速度校准,避免刚出隧道时非正常超速;(3)提高地下停车场的定位,结合停车场地图,可以准确寻车。(4)高端前装车辆开始追求更高精度的定位,特别是城市峡谷和高架桥下等弱信号场景。更多详情可访问天工测控或天工测控阿里店铺。


 举报
举报
更多回帖


