速度检测电路
本文采用增量式光电编码器来测量车速,其输出脉冲的频率正比于转速,可以通过测量单位周期内脉冲个数或者脉冲周期得到脉冲的频率,具有较高的精度。
电源变换电路
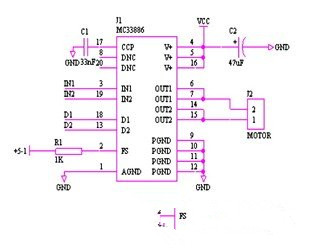
智能车系统配有7.2v的蓄电池,可直接为直流电机供电。单片机、光电传感器和光电编码器所需电压为5v,伺服舵机为6v。这些电压则由7.2v蓄电池调节得来。
单片机和光电编码器通过稳压芯片7805稳压输出5v电压供电。光电传感器数目多、功耗大,对电源稳定性要求更高,故单独采用效率较高的芯片lm2575对它供电。给舵机供电的芯片选用的是低压差可调输出三端线性稳压器lm1117,片上提供安全操作保护等功能。
软件设计
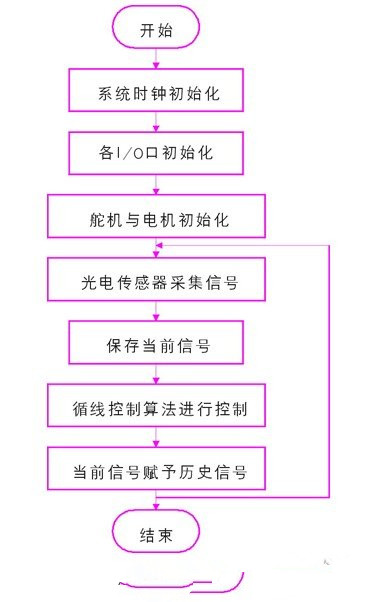
软件设计分模块实现,其中主程序包括时钟初始化、i/o口初始化、舵机电机初始化、采集信号和控制算法,程序流程见图7。
实验结果及其分析
程序开发过程中完全采用了组委会提供的s12核心开发板,它是由mc9s12dg128单片机构成的最小系统。mc9s12dg128属于hcs12系列单片机,是motorola推出的高性能16位微控制器。它能够提供32-512kb的第三代快闪嵌入式存储器,总线速度可达50mhz,外围时钟可达25mhz。还具备编码效益、片上纠错能力,并与mc68hc11和mc68hc12结构编码向上兼容。mc9s12dg128单片机具有112个引脚,其中与cpu相关的引脚都是兼容的。
s12开发板上有构成最小系统的复位电路、晶体振荡器及时钟电路,串行接口的rs-232驱动电路,+5v电源插座。单片机中已经写入了开发的监控程序。8个小灯用于调试应用系统。单片机的所有i/o端口都通过两个64芯的欧式插头引出。
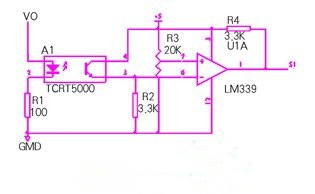
硬件调试时,分别对各模块功能进行测试,重点调节光电传感器,它感知黑白线时输出信号应不同,感知白线时经过比较器输出为低电平,感知黑线时输出为高电平。软件调试时,可利用bdm开发工具,显示单片机运行时其内部存储器中的数据。
通过硬件软件的联合调试和实验,出现了一些问题,但通过对程序的完善和车模的重新装配后效果大大改善。最终车模可在跑道上循线运行,但仍存在功耗较大,转向延时等问题。
结语
本文基于自动控制原理,利用探路模块的道路偏差信号使智能车实现寻迹跟踪,利用pwm技术控制电机的转速和舵机的转向。
本文重点介绍了光电传感器的排布“w”形布局以及循线控制算法,它们是保证智能车循线运行的关键。“w”形布局使智能车具备了道路预测能力,而循线控制算法使得车体转向快速正确。
通过对智能车仿真和实验表明,整个系统的方案可行,系统的控制策略和软硬件基本合理。控制方面,虽然经典的pid控制在电机调速方面有良好的控制效果,但由于车模的动力学模型因车况不同而变化等原因,使得pid控制效果受到影响,以后可考虑采用模糊控制,使算法更加智能化,系统的适应性更强。
速度检测电路
本文采用增量式光电编码器来测量车速,其输出脉冲的频率正比于转速,可以通过测量单位周期内脉冲个数或者脉冲周期得到脉冲的频率,具有较高的精度。
电源变换电路
智能车系统配有7.2v的蓄电池,可直接为直流电机供电。单片机、光电传感器和光电编码器所需电压为5v,伺服舵机为6v。这些电压则由7.2v蓄电池调节得来。
单片机和光电编码器通过稳压芯片7805稳压输出5v电压供电。光电传感器数目多、功耗大,对电源稳定性要求更高,故单独采用效率较高的芯片lm2575对它供电。给舵机供电的芯片选用的是低压差可调输出三端线性稳压器lm1117,片上提供安全操作保护等功能。
软件设计
软件设计分模块实现,其中主程序包括时钟初始化、i/o口初始化、舵机电机初始化、采集信号和控制算法,程序流程见图7。
实验结果及其分析
程序开发过程中完全采用了组委会提供的s12核心开发板,它是由mc9s12dg128单片机构成的最小系统。mc9s12dg128属于hcs12系列单片机,是motorola推出的高性能16位微控制器。它能够提供32-512kb的第三代快闪嵌入式存储器,总线速度可达50mhz,外围时钟可达25mhz。还具备编码效益、片上纠错能力,并与mc68hc11和mc68hc12结构编码向上兼容。mc9s12dg128单片机具有112个引脚,其中与cpu相关的引脚都是兼容的。
s12开发板上有构成最小系统的复位电路、晶体振荡器及时钟电路,串行接口的rs-232驱动电路,+5v电源插座。单片机中已经写入了开发的监控程序。8个小灯用于调试应用系统。单片机的所有i/o端口都通过两个64芯的欧式插头引出。
硬件调试时,分别对各模块功能进行测试,重点调节光电传感器,它感知黑白线时输出信号应不同,感知白线时经过比较器输出为低电平,感知黑线时输出为高电平。软件调试时,可利用bdm开发工具,显示单片机运行时其内部存储器中的数据。
通过硬件软件的联合调试和实验,出现了一些问题,但通过对程序的完善和车模的重新装配后效果大大改善。最终车模可在跑道上循线运行,但仍存在功耗较大,转向延时等问题。
结语
本文基于自动控制原理,利用探路模块的道路偏差信号使智能车实现寻迹跟踪,利用pwm技术控制电机的转速和舵机的转向。
本文重点介绍了光电传感器的排布“w”形布局以及循线控制算法,它们是保证智能车循线运行的关键。“w”形布局使智能车具备了道路预测能力,而循线控制算法使得车体转向快速正确。
通过对智能车仿真和实验表明,整个系统的方案可行,系统的控制策略和软硬件基本合理。控制方面,虽然经典的pid控制在电机调速方面有良好的控制效果,但由于车模的动力学模型因车况不同而变化等原因,使得pid控制效果受到影响,以后可考虑采用模糊控制,使算法更加智能化,系统的适应性更强。

 举报
举报