介绍
反向偏置差分线性传感器的主要应用是测量轴和轴向位移等线性运动,本文以Allegro ATS344LSP 反向偏置差分线性传感器 IC为例介绍了其传感原理,其磁性配置的优点,并给出了典型的用户应用。
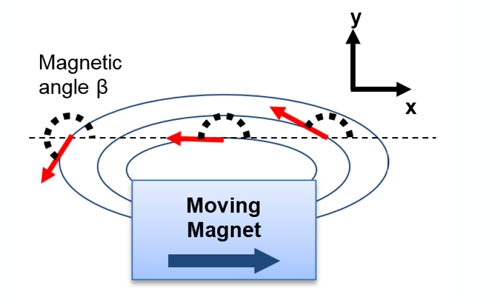
为了正确使用,此传感器必须与设计良好的移动铁磁靶相关联。反向偏置布置和差分感测技术需要特定的靶形状来产生有用的磁信号。
ATS344LSP 包含双线输出接口,并在封装中集成了旁路电容,使其适用于分散式传感器(通常用于汽车),无需使用印刷
电路板。
与通常用于线性位置测量的磁性传感器相比,ATS344LSP具有独特的性能优势。


 举报
举报
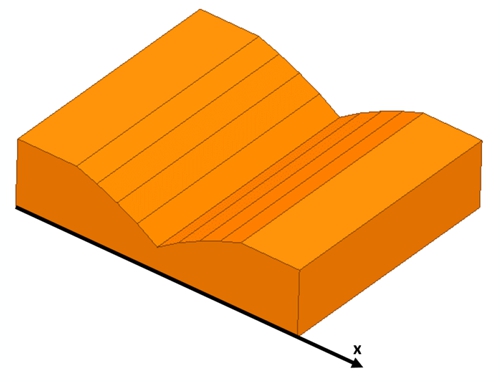

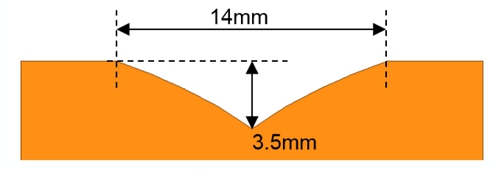
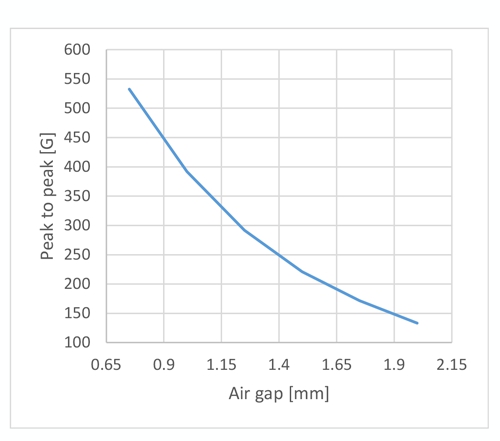
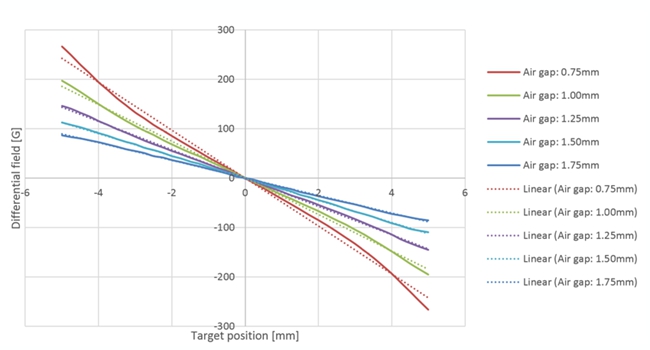 图6:ATS344LSP传感器感测的差分场与靶位置和空气间隙的关系。
图6:ATS344LSP传感器感测的差分场与靶位置和空气间隙的关系。