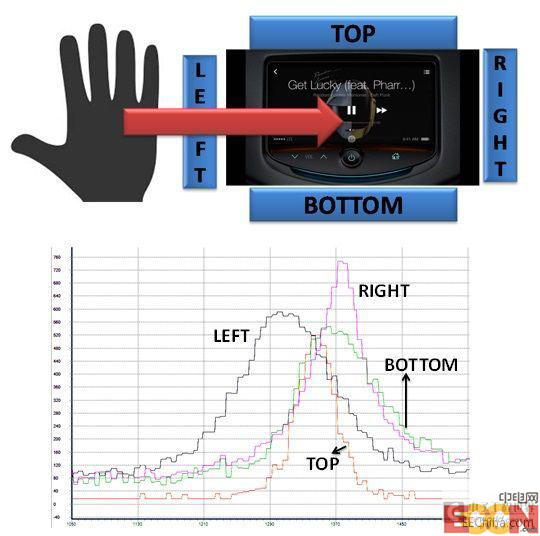
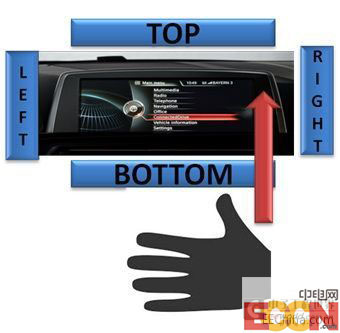
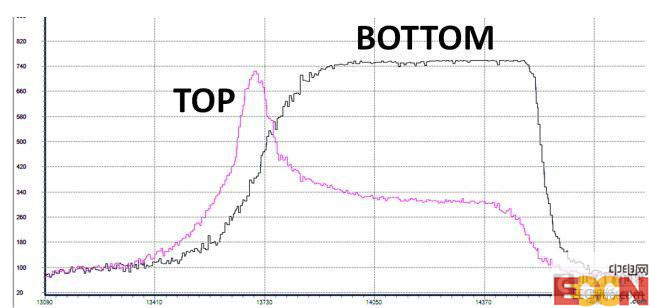
电容式接近传感器普遍用于检测传感器近距离处是否存在用户。通过检测,当感应到有用户存在后,我们即可选择背光发光来凸显特定按钮,或者将系统从低功耗运行模式下唤醒。具体就汽车应用而言,当电容式接近传感器感应到用户在车内时会打开车厢灯光,或激活无钥匙车门解锁系统。除了感应传感器附近是否存在用户之外,我们还能通过适当放置的多个接近传感器来识别空中的简单手势。所有传感器的数据能够结合在一起,从而映射出传感器邻近区域中用户的手势操作。这些手势可用来给系统提供输入信息,包括控制媒体播放机、进行地图导航或者浏览播放列表等。




 举报
举报



