




 举报
举报
 (T是同步周期)。Mirollo和Strogatz从理论上证明了在M&S模型下,多个耦合振荡器系统在几乎所有的初始情况下都能够达到同步,并在无线多跳网络测试床Gains上实现了M&S模型的萤火虫同步算法。
(T是同步周期)。Mirollo和Strogatz从理论上证明了在M&S模型下,多个耦合振荡器系统在几乎所有的初始情况下都能够达到同步,并在无线多跳网络测试床Gains上实现了M&S模型的萤火虫同步算法。 。信息从节点i传到j的传播时间为0到dij,dij为节点i到节点j的距离。D=maxijdij为网络的直径。GCS提出了两要求:
。信息从节点i传到j的传播时间为0到dij,dij为节点i到节点j的距离。D=maxijdij为网络的直径。GCS提出了两要求:
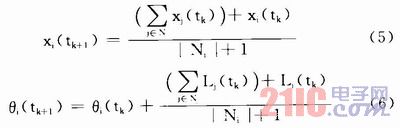
 ,式中N为网络的节点数。一种可行的权值选择方法是采用邻居节点的算术平均法,把相邻的节点的时隙偏差算术平均后作为时隙的修正量。对此算法的收敛性的仿真分析得出,随着节点覆盖半径的提高,每个节点的连通度增大,网络的最大跳数变少,因而收敛速度提高。算法平均迭代38次可以达到最大时隙偏差收敛到10-5以下。
举报
,式中N为网络的节点数。一种可行的权值选择方法是采用邻居节点的算术平均法,把相邻的节点的时隙偏差算术平均后作为时隙的修正量。对此算法的收敛性的仿真分析得出,随着节点覆盖半径的提高,每个节点的连通度增大,网络的最大跳数变少,因而收敛速度提高。算法平均迭代38次可以达到最大时隙偏差收敛到10-5以下。
举报
更多回帖


