6结束语
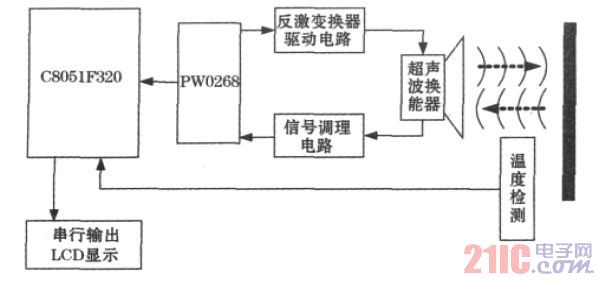
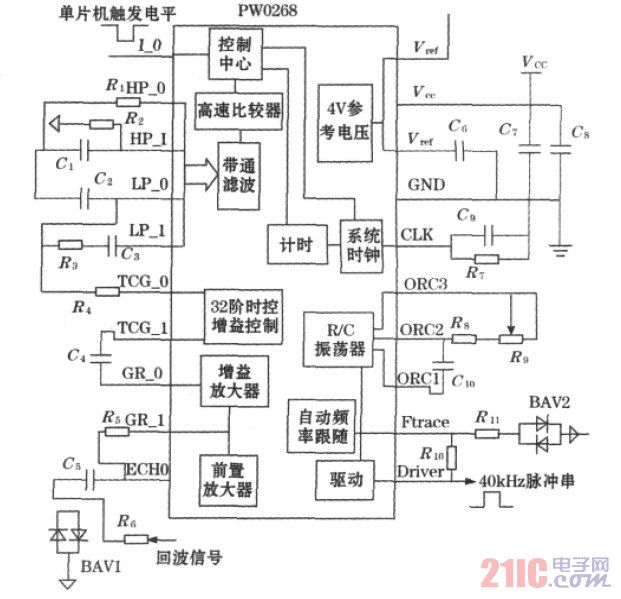
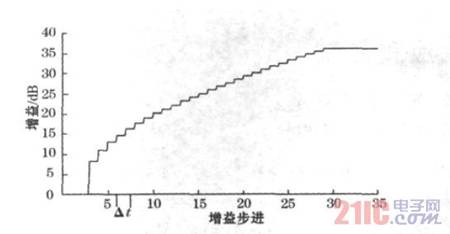
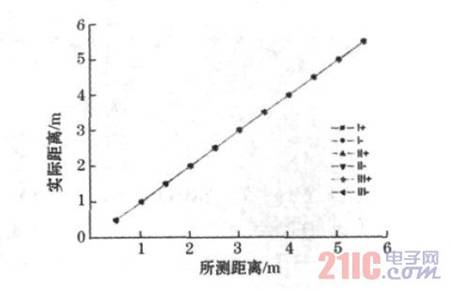
文中所设计的超声波测距系统采用反激变换器不仅将发射超声波的功率大幅度提高,而且有利于回波信号的判断和接收,提高了测距系统的灵敏度和准确性。接收超声波时使用时控增益放大器补偿了信号在波程中的幅值衰减,准确获得了回波信号,进而测算出了距离值。经过实验测试,文中所设计的测距系统不仅测量方法简单,电路结构清晰,成本较低,而且测距性能优良,可应用于工业非接触测距等场所。
6结束语
文中所设计的超声波测距系统采用反激变换器不仅将发射超声波的功率大幅度提高,而且有利于回波信号的判断和接收,提高了测距系统的灵敏度和准确性。接收超声波时使用时控增益放大器补偿了信号在波程中的幅值衰减,准确获得了回波信号,进而测算出了距离值。经过实验测试,文中所设计的测距系统不仅测量方法简单,电路结构清晰,成本较低,而且测距性能优良,可应用于工业非接触测距等场所。

 举报
举报