随着网络技术的进步,采用实时网络的伺服系统也随之发展。目前已有多种通讯协议被分布式运动控制系统采用。如以太网的协议(ethernet/ip、profinet及ethercat)、现场总线标准(profibus、interbus、controlnet),其它如:real-time ethernet、real-time can bus等等。
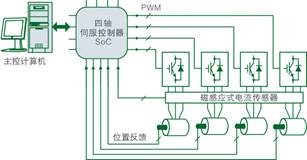
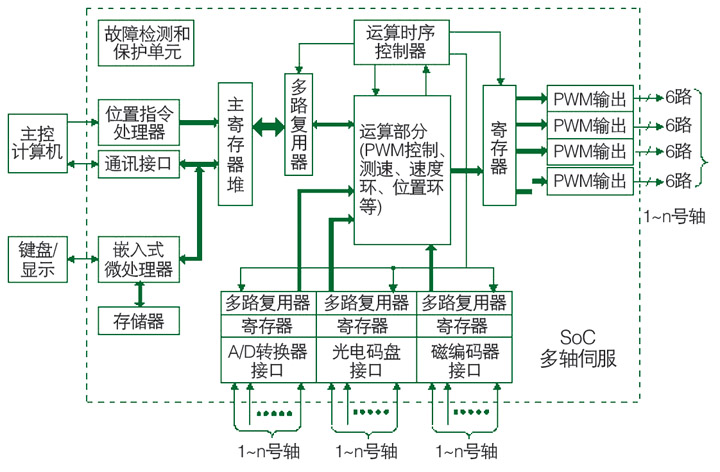
saat1000是深圳航天科技创新研究院推出的高性能四轴电机伺服控制芯片。它包括四轴运动控制引擎(four axes motor control engine),模数转换电路和接口,嵌入式8051微处理器,丰富的外设接口。它是一个完整意义的四轴电机伺服控制soc系统,可以实现对4台永磁伺服电机完全同步的位置、速度和电流伺服控制。嵌入式处理器可以提供良好的人机接口以及最大限度的提高芯片功能的灵活性,该款芯片的主要特性如下所示[1][2][3]:
随着网络技术的进步,采用实时网络的伺服系统也随之发展。目前已有多种通讯协议被分布式运动控制系统采用。如以太网的协议(ethernet/ip、profinet及ethercat)、现场总线标准(profibus、interbus、controlnet),其它如:real-time ethernet、real-time can bus等等。
saat1000是深圳航天科技创新研究院推出的高性能四轴电机伺服控制芯片。它包括四轴运动控制引擎(four axes motor control engine),模数转换电路和接口,嵌入式8051微处理器,丰富的外设接口。它是一个完整意义的四轴电机伺服控制soc系统,可以实现对4台永磁伺服电机完全同步的位置、速度和电流伺服控制。嵌入式处理器可以提供良好的人机接口以及最大限度的提高芯片功能的灵活性,该款芯片的主要特性如下所示[1][2][3]:



 举报
举报