开启该帖子的消息推送
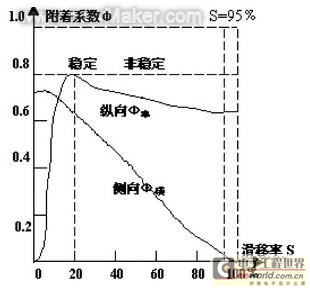
汽车行驶状态主要是由轮胎与地面之间的纵向作用力和横向作用力决定的,因此车轮与地面之间的作用力必然要受到轮胎与路面之间附着力的限制。
更多回帖
无需安装、支持浏览器和手机在线查看、实时共享
登录更多精彩功能!


 举报
举报
 举报
举报



