开启该帖子的消息推送
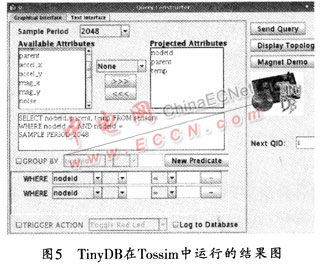
tinyDB是由美国加州大学伯克利分校的研究人员开发的一个无线传感器网络数据库的原型系统。它将整个无线传感器网络视为一个虚拟的数据库系统,并支持类SQL查询。传感器网络上的所有数据类型,包括各种类型的传感器数据、静态数据都关系表中的一个字段,目前系统的关系表只有一个Sensors表。
更多回帖
无需安装、支持浏览器和手机在线查看、实时共享
登录更多精彩功能!


 举报
举报
 举报
举报
 举报
举报



