6、结束语
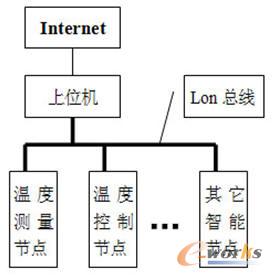
模糊控制技术在我国已广泛应用于工业过程、家用电器等领域,但模糊控制技术的网络应用还不多见。本文将Lonworks技术与模糊控制技术结合起来,通过上位机实现实时测控,在实际应用中取得了良好的控制效果。该系统还可充分利用主机资源,使模糊控制算法位于上层,从而可以绑定多个设备节点,以便于构造不同的模糊控制器。控制参数可以通过人机界面由用户输入,通用性强、操作灵活便捷,为模糊控制生成器与现场设备的集成提供了一种有效的途径。
本文作者创新点:将Lonworks技术与模糊控制技术结合起来,给出了智能节点的设计方法和实例,通过计算机实现网络监控,能远程实施温度测控,在应用中取得了良好的控制效果。
6、结束语
模糊控制技术在我国已广泛应用于工业过程、家用电器等领域,但模糊控制技术的网络应用还不多见。本文将Lonworks技术与模糊控制技术结合起来,通过上位机实现实时测控,在实际应用中取得了良好的控制效果。该系统还可充分利用主机资源,使模糊控制算法位于上层,从而可以绑定多个设备节点,以便于构造不同的模糊控制器。控制参数可以通过人机界面由用户输入,通用性强、操作灵活便捷,为模糊控制生成器与现场设备的集成提供了一种有效的途径。
本文作者创新点:将Lonworks技术与模糊控制技术结合起来,给出了智能节点的设计方法和实例,通过计算机实现网络监控,能远程实施温度测控,在应用中取得了良好的控制效果。

 举报
举报