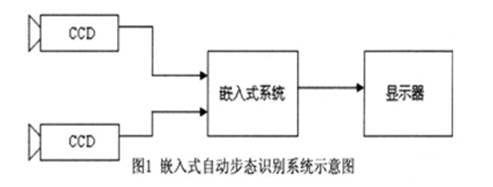
早期的医学研究指出:人的步态中有24种不同的成分,如果把这24种成分都考虑到,则步态是为个体所特有的。有关研究人员近些年来通过对人的步态分析,已经得出了在步态视频序列中含有人的身份信息,因此进行步态识别也是一种非常重要的生物识别技术。步态识别是近年来越来越多的研究者所关注的一种较新的生物认证技术,它是通过人的走路方式来识别人的身份。基于步态的身份认证识别技术相对于其它生物识别技术有如下优点:远距离识别、识别对象的被动性、不易被隐藏、不易被察觉、应用领域广阔等,步态识别技术最近已经备受关注,并且已经取得了一些初步成果。如美国国防部研究项目署(DARPA)2000年的重大项目一HID(human identification at adistance)计划,其目的就是开发多模态视觉监控技术以实现远距离情况下人物的检测、分类和识别。中科院自动化研究所模式识别国家重点实验室近年也开始了对步态识别的研究,而且创建了NLPR步态数据库。


 举报
举报
 ,展开为
,展开为
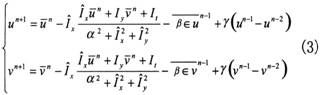
 其中u和v是该点的光流的x分量和y分量,则式(1)为
其中u和v是该点的光流的x分量和y分量,则式(1)为
 加权横坐标
加权横坐标 作
作
 N为矛盾引子,
N为矛盾引子,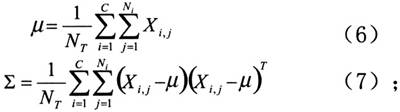
 其中α表示样本集在前K个轴上的能量占整个能量的百分比。通常取α值接近于1,以使得样本集在前K个轴上的能量几乎接近于整个能量。
其中α表示样本集在前K个轴上的能量占整个能量的百分比。通常取α值接近于1,以使得样本集在前K个轴上的能量几乎接近于整个能量。



 积分区间R1为当w2误判为w1时的误判区间,而积分区间R2为当w1误判为w2时的误判区间。当p(e)最小时,识别越有效,而当p(e)越大时,识别性能越差。当有多类步态时,依次类推。
积分区间R1为当w2误判为w1时的误判区间,而积分区间R2为当w1误判为w2时的误判区间。当p(e)最小时,识别越有效,而当p(e)越大时,识别性能越差。当有多类步态时,依次类推。





