1、CCIR 通信总线
(1)CCIR601:16 位数据传输;Y、U、V 信号同时传输,是并行数据,行场同步单独输出。
(2)CCIR656:8/10 位数据传输;不需要同步信号;串行数据传输;传输速率是 601 的 2 倍;先传 Y,后传 UV;行场同步信号嵌入在数据流中。
(3)行同步信号常用 HS 或 HSYNC 表示,场同步信号常用 VS 或 VSYNC 表示。
行同步信号的作用是选择出液晶面板上有效行信号区间,场同步信号的作用是选择出液晶面板上有效场信号区间。行场同步信号的共同作用,可将选择出液晶面板上的有效视频信号区间。
2、MIPI CSI-2 和 DVP
(1)CSI 即Camera Sensor Interface,相机串行接口;DVP 即Digital Video Port,数字式视频端口。
(2)MIPI 是差分串口传输,速度快,抗干扰,使用需要 CLKP/N(2 根线)、DATAP/N(4 组 8 根线),最大支持 4-lane,一般 2-lane 可以搞定。
(3)DVP 是并口传输,速度较慢,传输的带宽低,使用需要 PCLK(sensor 输出时钟)、MCLK(XCLK)(外部时钟输入)、VSYNC(场同步)、HSYNC(行同步)、D[0:11](并口数据)——可以是 8/10/12bit 数据位数大小。
(4)以分辨率 320×240 的屏为例,每一行需要输入 320 个脉冲来依次移位、锁存这一行的数据,然后来个 HSYNC 脉冲换一行。这样依次输入 240 行之后换行同时来个 VSYNC 脉冲把行计数器清零,又重新从第一行开始刷新显示。
3、BSP
BSP 即 Board Support Package,板级支持包。它是介于主板硬件和操作系统中驱动层程序之间的一层,一般认为它属于操作系统一部分,主要是实现对操作系统的支持,为上层的驱动程序提供访问硬件设备寄存器的函数包,使之能够更好的运行于硬件主板。
4、SerDes
(1)SerDes 是SERializer(串行器) 和 DESerializer(解串器)的简称。它是一种主流的时分多路复用(TDM)、点对点(P2P)的串行技术,即在发送端多路低速并行信号被转换成高速串行信号,经过传输媒体(光缆或铜线),最后在接收端高速串行信号重新转换成低速并行信号。
(2)这种点对点的串行通信技术充分利用传输媒体的信道容量,减少所需的传输信道和器件引脚数目,提升信号的传输速度,从而大大降低通信成本。
5、FPD-Link III
FPD-Link III 串行总线方案支持通过单个差分链路实现高速视频数据传输和双向控制通信的全双工控制。 通过单个差分对整合视频数据和控制可减少互连线尺寸和重量,同时还消除了偏差问题并简化了系统设计。
6、RGB 格式、YUV 格式和 RAW data 格式
(1)传统的红绿蓝格式,比如 RGB565,RGB888;其16-bit数据格式为 5-bit R + 6-bit G + 5-bit B,G 多一位,原因是人眼对绿色比较敏感。
(2)YUV 是指亮度参量和色度参量分开表示的像素格式,而这样分开的好处就是不但可以避免相互干扰,还可以降低色度的采样率而不会对图像质量影响太大。
(3)RAW 图像就是 CMOS 或者 CCD 图像感应器将捕捉到的光源信号转化为数字信号的原始数据。
7、摄像头结构和工作原理
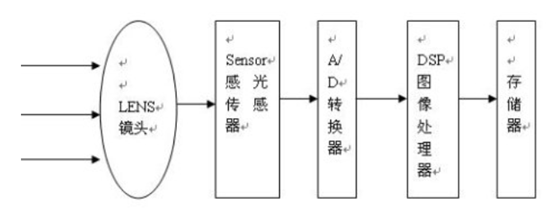
拍摄景物通过镜头,将生成的光学图像投射到传感器上,然后光学图像被转换成电信号,电信号再经过模数转换变为数字信号,数字信号经过DSP加工处理,再被送到电脑中进行处理,最终转换成
手机屏幕上能够看到的图像。


