4 结束语
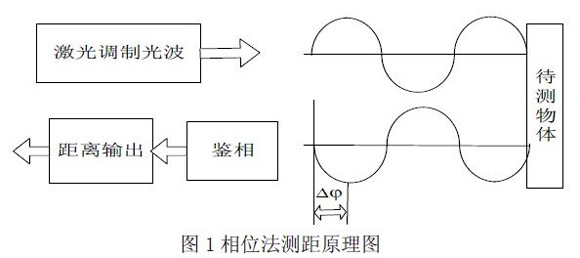
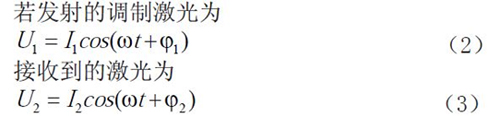
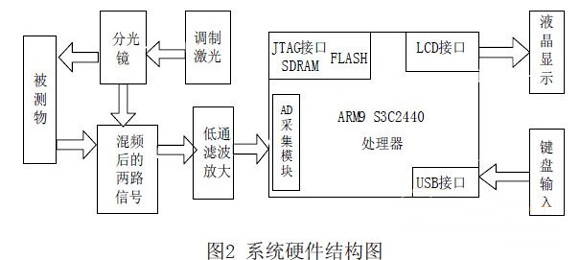
本文叙述了相位式激光测距的原理,较为详细地给出了系统的设计方案,并且采用ARM9 处理器和引入了嵌入式实时操作系统μC/OS-II.一方面,实时操作系统具有高效的多任务优先级管理、可裁减的内核结构、强大的扩展性和可移植性以及微秒级的中断管理等都更加有利于提高效率,有效的降低了应用程序开发的难度,有利于提高软件开发效率和开发周期的缩短。另一方面,嵌入式技术的应用和ARM9 处理器自身的性能给系统提供了优良的硬件条件,这样从整体上提高了测距系统的实时性、稳定性、抗干扰性,具有一定的实用价值。
4 结束语
本文叙述了相位式激光测距的原理,较为详细地给出了系统的设计方案,并且采用ARM9 处理器和引入了嵌入式实时操作系统μC/OS-II.一方面,实时操作系统具有高效的多任务优先级管理、可裁减的内核结构、强大的扩展性和可移植性以及微秒级的中断管理等都更加有利于提高效率,有效的降低了应用程序开发的难度,有利于提高软件开发效率和开发周期的缩短。另一方面,嵌入式技术的应用和ARM9 处理器自身的性能给系统提供了优良的硬件条件,这样从整体上提高了测距系统的实时性、稳定性、抗干扰性,具有一定的实用价值。

 举报
举报