1定制基于Avalon总线的用户外设介绍
NiosⅡ的Avalon总线不同于其他微处理器的固定外设,NiosⅡ的外设是可以任意定制的,这使得用户可以根据具体的应用需求而定制。所有的NiosⅡ系统外设都是通过Avalon总线与NiosⅡ软核相连,从而进行数据交换。因此对于用户定义的外设必须遵从该总线协议才可与NiosⅡ之间建立联系。
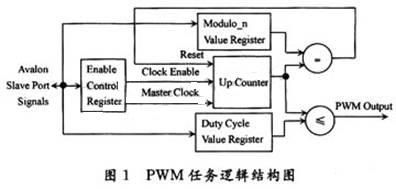
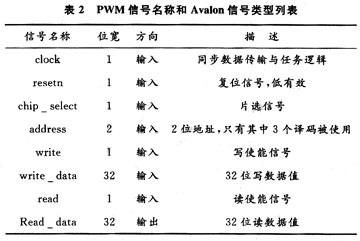
Avalon信号接口定义了一组信号类型片选、读使能、写使能、地址、数据等,用于描述主从外设上基于地址的读写接口。外设使用准确的信号与其内核逻辑进行接口,并删除会增加不必要开销的信号。
在NiosⅡ系统中一个自定义设备由如下几部分组成:
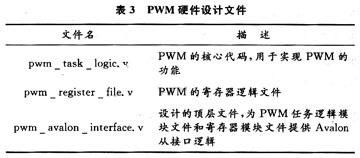
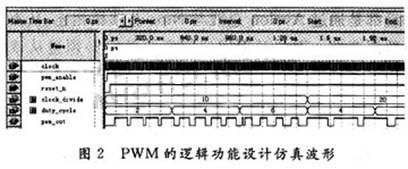
(1)硬件文件:用HDL语言编写的描述自定义设备元件逻辑的硬件描述文件。
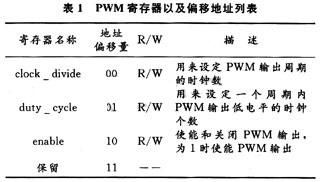
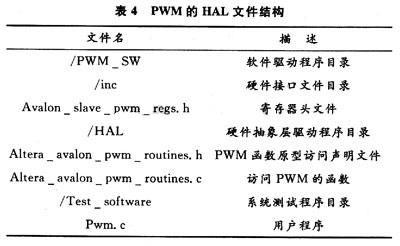
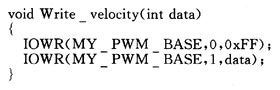
(2)软件文件:用C语言编写的设备寄存器文件以及设备的驱动程序文件。
(3)设备描述文件(Ptf):本文件描述了设备的结构,包含SoPCBuilder配置以及将其集成到系统中时所需要的信息。本文件由SoPCBuilder根据硬件文件以及软件文件自动生成。
1定制基于Avalon总线的用户外设介绍
NiosⅡ的Avalon总线不同于其他微处理器的固定外设,NiosⅡ的外设是可以任意定制的,这使得用户可以根据具体的应用需求而定制。所有的NiosⅡ系统外设都是通过Avalon总线与NiosⅡ软核相连,从而进行数据交换。因此对于用户定义的外设必须遵从该总线协议才可与NiosⅡ之间建立联系。
Avalon信号接口定义了一组信号类型片选、读使能、写使能、地址、数据等,用于描述主从外设上基于地址的读写接口。外设使用准确的信号与其内核逻辑进行接口,并删除会增加不必要开销的信号。
在NiosⅡ系统中一个自定义设备由如下几部分组成:
(1)硬件文件:用HDL语言编写的描述自定义设备元件逻辑的硬件描述文件。
(2)软件文件:用C语言编写的设备寄存器文件以及设备的驱动程序文件。
(3)设备描述文件(Ptf):本文件描述了设备的结构,包含SoPCBuilder配置以及将其集成到系统中时所需要的信息。本文件由SoPCBuilder根据硬件文件以及软件文件自动生成。

 举报
举报