图像增强从作用域出发,分为空间域增强和频率域增强两种。频率域是一种间接增强的方法,由于存在域之间的变换和反变换,计算复杂,难以满足实时性要求。自适应分段线性拉伸算法是一种空间域图像增强方法,直接对图像像素灰度进行操作,由于运算过程简单、实现方便,目前的图像增强预处理电路大多选用这种算法。硬件实现上,最初是采用单片DSP芯片实现,其原理为:图像数据实时的传输给DSP,DSP接收完1块数据后,再对整块数据进行增强处理,这样势必会造成时间的延迟,不能满足精确制导武器系统实时性的要求。后来硬件结构发展为采取DSP,FPGA芯片相结合的方式。


 的值;在下帧正程时,只需计算Q·[X(i,j)-Xmin],然后将得到的结果除以64(左移6位),即对每个像素只需1次减法、1次乘法和移位就可完成拉伸运算。实现框图如图1所示,拉伸后数据的输出仅比输入延时62.5 ns,实现了对红外图像的实时处理。
的值;在下帧正程时,只需计算Q·[X(i,j)-Xmin],然后将得到的结果除以64(左移6位),即对每个像素只需1次减法、1次乘法和移位就可完成拉伸运算。实现框图如图1所示,拉伸后数据的输出仅比输入延时62.5 ns,实现了对红外图像的实时处理。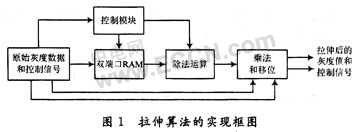


 举报
举报
 举报
举报
更多回帖


