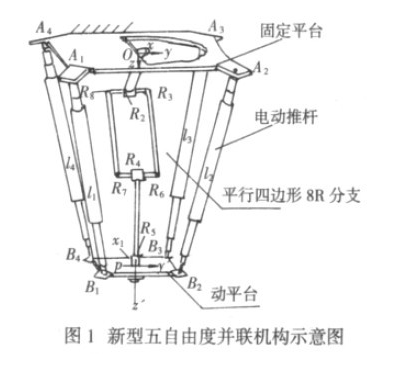
并联机构是由多个并行链构成的闭环机械系统。相对于串联机构,]研究的并联机构如图1 所示。A1~A4、B1~B4 为球副, R1~R8 为转动副, L1~L4 为电动推杆, 实现伸缩运动。A1A2A3A4 组成了静平台, B1B2B3B4 为动平台。
其中, 在机器人系统中, 四根电动推杆L1~L4 和中间的转动副( O) 为主动输入, 这样动平台相对于静平台就有五个自由度,相应的控制量为: 位移量l1、l2、l3、l4 及转角。工作时控制驱动关节使工件在三维空间进行移动或转动, 从而实现了动平台的运动。
2 控制系统的硬件组成并联机构的控制系统组成如图2]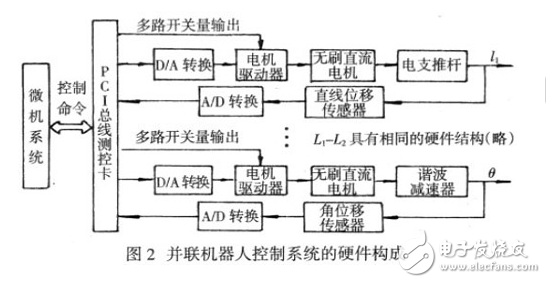
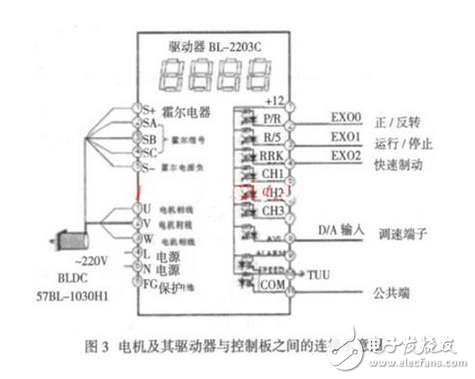
以微机作为处主理器,]电机的正/反转、方向、运行/停止控制端被内部电阻上拉到12V, 无输入时均为高电平。通过控制端子“R/S”相对于“COM”的通、断可以控制电机的运行和停止。当“R/S”与端子“COM”断开时电机停止, 反之电机运行。使用运行/停止端控制电机停止时, 电机为自然停车, 其运动规律与负载惯性有关。通过控制端子“DIR”与端子“COM”的通、断可以控制电机的运转方向。当“DIR”与端子“COM”不接通时电机顺时针方向运行( 面对电机轴) , 约定为正转;反之则逆时针方向运转, 约定为反转。为避免驱动器的损坏应避免在电机运行时进行运转方向控制。驱动器通过端子BRK~COM可以控制无刷电机的迅速停止, 制动采用受控能耗制动方式, 相对于R/S 的自由停车会迅速的多, 但具体时间受用户系统( 尤其是系统惯量) 的影响。
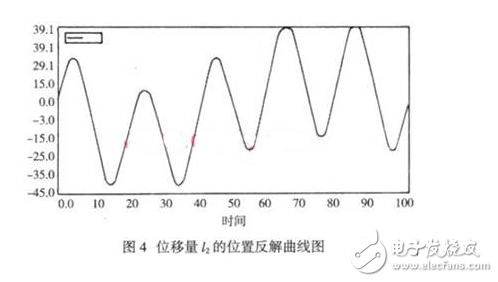
3]本并联机构在实际控制时使用的轨迹参数是在ADAMS 环境中仿真获取的。部分仿真数据结果如图4 所示。ADAMS 软件使用交互式图形环境和零件库、约束库、力库, 创建完全参数化的机械系统几何模型, 其求解器采用多刚体系统动力学理论中的拉格郎日方程方法, 建立系统动力学方程, 对虚拟机械系统进行静力学、运动学和动力学分析, 可以输出位移、速度、加度和反作用力曲线。 ADAMS 是虚拟样机分析的应用软件, 用户可以运用该软件非常方便地对虚拟机械系统进行静力学、运动学和动力学分析。通过本软件可以获取支路变量反解值曲线, 将获得的曲线离散化即可得到所需的控制量, 位置给定为离散化后的期望目标位置。
4 控制系统的软件设计在Windows]
程序中用Settimer(]此外, 另设置了一个计时器定时改变期望位置, 时间间隔为t, 通过改变t 的大小调节动平台的运动速度。位置给定r( kt) 是由ADAMS 仿真得到, 离散化的时间间隔为0.05s。 通过A/D]位移偏差:
e(]通过实验验证得知: 当e( KT) 》0 时, 电机驱动器F/R 端为高电平, 即电机正转当e( KT) 《0 时, 电机驱动器F/R 端为低电平, 即电机反转, 此条件为闭环系统稳定的必要条件。由控制器运算得出控制量u( KT) , 其值由D/A 转换输出到电机驱动器的转速端子“AVI”, 调节无刷直流电机的转速。
5 控制系统的实验验证在实验过程中,]结束语
以无刷直流电机为驱动部件,]实验结果表明:
(]( 2) 并联机构各支路的控制精度能够满动平台运动的需求。
( 3) 利用ADAMS 软件获得的位置曲在实物证验证中得到了较好的应用。

 举报
举报


