模拟技术学习
登录
直播中
李维奇
7年用户
228经验值
私信
关注
[问答]
水下航行器模拟平台系统的总体架构是什么?
开启该帖子的消息推送
水下航行器
gps
为了使水下航行器装入密封舱后所有模块正常运行,设计了一个模拟平台,涵盖了模拟
电路
、数字电路、信号处理、无线射频、
电源
、传感器等方面,特别是小车轨迹使用上层的PID参数的智能化控制,具有远距离数据传输能力和远程控制能力。通过平台模拟水下航行器的运动状况,对加速度与速度、周围环境的温度与湿度、电池的状态等参数采集,达到实验目的,同时节省人力物力,方便、适用性强。
回帖
(3)
刘瑞
2019-8-9 16:33:20
进入21世纪以来,随着世界经济的发展,各国对资源的需求量不断增加,而陆地资源日趋紧张,各国便将目光投向了广阔的海洋。海洋监测技术成为海洋资源开发的支撑,随着海洋开发的不断深入,越来越多的实验需要在真实海洋环境下进行,实验时的海况成为了影响和制约实验可行性和结果正确性的关键因素,再加上海洋项目的成本比较高,就需要一个智能平台来实验水下航行器的功能,更加接近的模拟实验的环境,通过各种传感器的综合运用,这样才能在真实的环境中得到更加有效的数据,从而更加合理的开发和利用海洋资源,造福人民,保卫祖国的海疆。
1 系统的总体架构
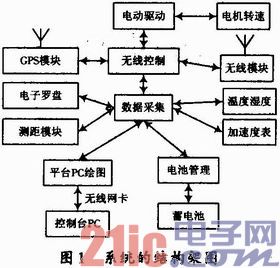
整个系统由四部分组成:无线部分,数据采集处理部分,电机驱动部分和供电部分,每部分由单独单片机作为主控芯片,各部分间利用CAN总线交互数据。无线部分由GPS模块、无线数据传输模块和无线控制器组成,负责卫星定位、数据收发等功能;数据采集处理部分由各种传感器和数据采集处理板组成,负责周围环境要素的收集、处理工作和转速的返回;电机驱动部分由空心杯直流电机、直流电机驱动器和编码器组成,负责驱动直流电机和控制直流电机的转速达到预期的速度;供电部分包括蓄电池、电池管理板和电压转换板,负责为系统各部分提供所需电压和能量。整个系统的组成框图如图1所示。
进入21世纪以来,随着世界经济的发展,各国对资源的需求量不断增加,而陆地资源日趋紧张,各国便将目光投向了广阔的海洋。海洋监测技术成为海洋资源开发的支撑,随着海洋开发的不断深入,越来越多的实验需要在真实海洋环境下进行,实验时的海况成为了影响和制约实验可行性和结果正确性的关键因素,再加上海洋项目的成本比较高,就需要一个智能平台来实验水下航行器的功能,更加接近的模拟实验的环境,通过各种传感器的综合运用,这样才能在真实的环境中得到更加有效的数据,从而更加合理的开发和利用海洋资源,造福人民,保卫祖国的海疆。
1 系统的总体架构
整个系统由四部分组成:无线部分,数据采集处理部分,电机驱动部分和供电部分,每部分由单独单片机作为主控芯片,各部分间利用CAN总线交互数据。无线部分由GPS模块、无线数据传输模块和无线控制器组成,负责卫星定位、数据收发等功能;数据采集处理部分由各种传感器和数据采集处理板组成,负责周围环境要素的收集、处理工作和转速的返回;电机驱动部分由空心杯直流电机、直流电机驱动器和编码器组成,负责驱动直流电机和控制直流电机的转速达到预期的速度;供电部分包括蓄电池、电池管理板和电压转换板,负责为系统各部分提供所需电压和能量。整个系统的组成框图如图1所示。
举报
任娟娟
2019-8-9 16:33:31
2 系统硬件设计
单片机采用Microchip公司出品的高性能dsPIC30F4011,内部带有DSP引擎,能进行大规模、高速的数据处理,并内置A/D转换模块、SPI总线模块、CAN总线模块、UART模块等,利用这些模块可以简化外围电路的设计,增强系统的可靠性,缩短开发周期。软件植入μCOSⅡ操作系统,它是一个基于优先级的抢占式多任务实时内核,可以实现多任务调度,提高了系统的有效性、稳定性和可靠性。
2.1 参数采集板的设计
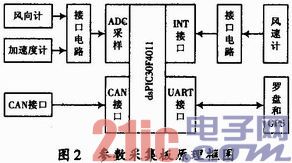
参数采集板主要用于采集风速、风向、转速以及加速度和GPS数据等。参数采集板功能框图如图2所示。
2.1.1 风速风向测量
采用PH100SX风速风向传感器,由风速传感器和风向传感器组成。风速传感器给出的是频率信号且频率在1 kHz以下,采用单片机的输入捕捉来测量。每当风速传感器频率信号上升沿刭来时输入捕捉就会产生中断,此时记下定时器中的数值,通过两次中断记下的两个数值相减,同时根据定时器周期,就可以算出风速信号的频率值,再利用风速计算公式(1)算出风速。风向传感器的变换器采用精密导电塑料电位器,从而在电位器的活动端产生变化的电阻信号输出,经过单片机的A/D采样转换为10位数字信号,然后根据风向公式(2)计算出风向值。把数字罗盘的正方向、智能平台的正方向、风向传感器的定北点规定在一条直线上,用航向角来修正风向,得到实际的风向数值,即偏离地理北的角度。经过协议转换后,将这些风速、风向、加速度以及罗盘数据GPS数据发送到CAN总线上。
风速计算公式:
V=(0.3+0.0877×f) (1)
式中:V为风速值(单位:m/s);f为信号频率;0.3和0.087 7为常系数(不同型号的风速传感器的系数不一样)。
风向计算公式:
D=360°×R0/R+ (2)
式中:D为相对风向值(单位:(°));R+为电位器电阻(单位:Ω);R0为输出电阻(单位:Ω)。
2.1.2 大气参数的采集
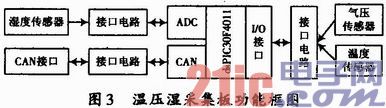
大气参数主要包括大气温度、大气压强和大气湿度,由相关的传感器采集,温压湿采集板的框图如图3所示。
温度的测量使用高精度的传感器DS1820数字温度计来获取,提供了9位温度读数指示器件的温度,测量范围从-55~+125℃,增量值为0.5℃。
大气压强的测量用集成气压传感模块MS5561来实现,它是一款集成有压阻式压力传感器和ADC接口的SMD混合集成电路,可提供依赖于压力和温度的16位数据字,可通过3线串行接口与微处理器进行通信。
大气湿度的测量用高精度的传感器SY-HS-220来获取,只需通过单线接口与单片机相连,再通过A/D转换,算法处理即可获得湿度值。
2.1.3 数字罗盘
主要目的是给出平台的朝向值,来修正加速度和风向。S24-H是一个平面罗盘和双轴传感器的组合产品,由一个处理单元分别测量运算出罗盘和倾角的数据信息,然后放在同一组数据包中输出,产品输出接口同时提供TTL和485两种方式,默认传输速率为19 200 b/s。
2.1.4 激光测距系统
激光测量系统LMS200,是基于飞行时间测量原理(激光雷达),通过激光发射到被反射回激光测距仪的时间算出障碍物和激光测距仪之间的距离。
式中:ρ是障碍物到激光测距仪的距离;V是光速;t是从激光发出到被反射回来的时间。
2.2 远程无线板设计
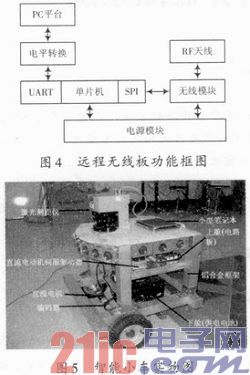
无线数据传输通过RFC-30F无线通信模块实现。RFC-30F单片无线收发器工作在433 MHz的ISM频段。由频率调制器、解调器、RF功放和调节控制器组成。远程无线板的框图如图4所示。
卫星接收模块采用中国***省长天科技股份有限公司产品,型号为GM-82,是一个具备全方位完整的卫星定位接收器。
2.3 电机的驱动部分
主要由空心杯直流电机、ED系列直流电动机伺服驱动器和编码器组成,通过单片机的普通I/O口和PWM控制直流电机驱动器,使空心杯直流电机在驱动器的控制下转动,编码器负责测量电机的实际转速,在程序上用电机的转速闭环(PID)控制,用无线控制手柄对速度进行实时的控制。实物图如图5所示。
2 系统硬件设计
单片机采用Microchip公司出品的高性能dsPIC30F4011,内部带有DSP引擎,能进行大规模、高速的数据处理,并内置A/D转换模块、SPI总线模块、CAN总线模块、UART模块等,利用这些模块可以简化外围电路的设计,增强系统的可靠性,缩短开发周期。软件植入μCOSⅡ操作系统,它是一个基于优先级的抢占式多任务实时内核,可以实现多任务调度,提高了系统的有效性、稳定性和可靠性。
2.1 参数采集板的设计
参数采集板主要用于采集风速、风向、转速以及加速度和GPS数据等。参数采集板功能框图如图2所示。
2.1.1 风速风向测量
采用PH100SX风速风向传感器,由风速传感器和风向传感器组成。风速传感器给出的是频率信号且频率在1 kHz以下,采用单片机的输入捕捉来测量。每当风速传感器频率信号上升沿刭来时输入捕捉就会产生中断,此时记下定时器中的数值,通过两次中断记下的两个数值相减,同时根据定时器周期,就可以算出风速信号的频率值,再利用风速计算公式(1)算出风速。风向传感器的变换器采用精密导电塑料电位器,从而在电位器的活动端产生变化的电阻信号输出,经过单片机的A/D采样转换为10位数字信号,然后根据风向公式(2)计算出风向值。把数字罗盘的正方向、智能平台的正方向、风向传感器的定北点规定在一条直线上,用航向角来修正风向,得到实际的风向数值,即偏离地理北的角度。经过协议转换后,将这些风速、风向、加速度以及罗盘数据GPS数据发送到CAN总线上。
风速计算公式:
V=(0.3+0.0877×f) (1)
式中:V为风速值(单位:m/s);f为信号频率;0.3和0.087 7为常系数(不同型号的风速传感器的系数不一样)。
风向计算公式:
D=360°×R0/R+ (2)
式中:D为相对风向值(单位:(°));R+为电位器电阻(单位:Ω);R0为输出电阻(单位:Ω)。
2.1.2 大气参数的采集
大气参数主要包括大气温度、大气压强和大气湿度,由相关的传感器采集,温压湿采集板的框图如图3所示。
温度的测量使用高精度的传感器DS1820数字温度计来获取,提供了9位温度读数指示器件的温度,测量范围从-55~+125℃,增量值为0.5℃。
大气压强的测量用集成气压传感模块MS5561来实现,它是一款集成有压阻式压力传感器和ADC接口的SMD混合集成电路,可提供依赖于压力和温度的16位数据字,可通过3线串行接口与微处理器进行通信。
大气湿度的测量用高精度的传感器SY-HS-220来获取,只需通过单线接口与单片机相连,再通过A/D转换,算法处理即可获得湿度值。
2.1.3 数字罗盘
主要目的是给出平台的朝向值,来修正加速度和风向。S24-H是一个平面罗盘和双轴传感器的组合产品,由一个处理单元分别测量运算出罗盘和倾角的数据信息,然后放在同一组数据包中输出,产品输出接口同时提供TTL和485两种方式,默认传输速率为19 200 b/s。
2.1.4 激光测距系统
激光测量系统LMS200,是基于飞行时间测量原理(激光雷达),通过激光发射到被反射回激光测距仪的时间算出障碍物和激光测距仪之间的距离。
式中:ρ是障碍物到激光测距仪的距离;V是光速;t是从激光发出到被反射回来的时间。
2.2 远程无线板设计
无线数据传输通过RFC-30F无线通信模块实现。RFC-30F单片无线收发器工作在433 MHz的ISM频段。由频率调制器、解调器、RF功放和调节控制器组成。远程无线板的框图如图4所示。
卫星接收模块采用中国***省长天科技股份有限公司产品,型号为GM-82,是一个具备全方位完整的卫星定位接收器。
2.3 电机的驱动部分
主要由空心杯直流电机、ED系列直流电动机伺服驱动器和编码器组成,通过单片机的普通I/O口和PWM控制直流电机驱动器,使空心杯直流电机在驱动器的控制下转动,编码器负责测量电机的实际转速,在程序上用电机的转速闭环(PID)控制,用无线控制手柄对速度进行实时的控制。实物图如图5所示。
举报
郑成枝
2019-8-9 16:33:33
3 程序软件设计
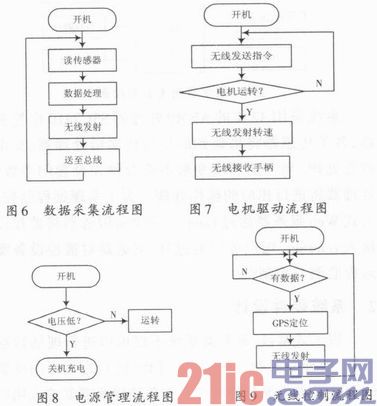
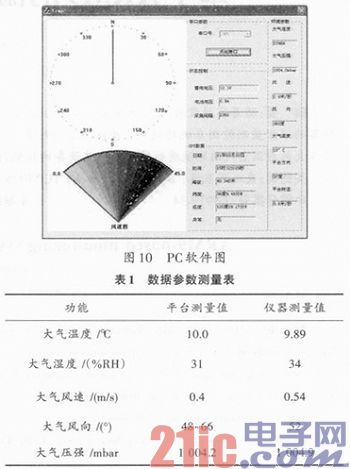
单片机程序包括电源管理、无线控制、数据采集和电机驱动四大功能模块,PC机软件包括界面、数据接收与处理、数据存储和电源状态四部分,流程图如图6~图9所示,PC软件如图10所示。
4 系统测试
系统测试在空旷的地方并且人为的设置障碍完成,验证小车的功能和工作状态以及各种传感器的可靠性和精度,用电风扇模拟风,热风枪模拟气温升高,观察PC界面软件,测得的数据与相关仪器测得的数据进行比较,结果见表1。
5 结语
本项目准备开发与研制一种陆路智能的运载平台,用来仿真水下航行器的自身定位与地图的构建,并且通过一些传感器将周围环境的参数通过平台传递给远程的控制平台,以便获取环境的信息。从测试数据中可以看出,智能运载平台各项功能均能正常工作,基本能够满足设计所提出的性能参数要求。
3 程序软件设计
单片机程序包括电源管理、无线控制、数据采集和电机驱动四大功能模块,PC机软件包括界面、数据接收与处理、数据存储和电源状态四部分,流程图如图6~图9所示,PC软件如图10所示。
4 系统测试
系统测试在空旷的地方并且人为的设置障碍完成,验证小车的功能和工作状态以及各种传感器的可靠性和精度,用电风扇模拟风,热风枪模拟气温升高,观察PC界面软件,测得的数据与相关仪器测得的数据进行比较,结果见表1。
5 结语
本项目准备开发与研制一种陆路智能的运载平台,用来仿真水下航行器的自身定位与地图的构建,并且通过一些传感器将周围环境的参数通过平台传递给远程的控制平台,以便获取环境的信息。从测试数据中可以看出,智能运载平台各项功能均能正常工作,基本能够满足设计所提出的性能参数要求。
举报
更多回帖
rotate(-90deg);
回复
相关问答
水下航行器
gps
航行
器
半实物仿真具有哪些特点?由那几部分组成?
2021-04-14
1268
运载
平台
怎么实验
水下
航行
器
的功能?
2019-08-16
1358
水下
设备应如何接地?
2014-12-11
4509
平台
罗经训练
模拟器
设计介绍
2019-07-23
1575
基于电磁耦合的
水下
无线能量传输
系统
该如何去设计?
2021-06-03
1256
如何设计
水下
机器人嵌入式控制
系统
?
2019-10-29
3054
关于
水下
声学传感
器
网络无线多点通信
系统
研究不看肯定后悔
2021-06-07
1519
基于ARM的
系统
架构
平台
2019-07-05
3680
Dymola多学科
系统
仿真
平台
介绍
2021-01-22
1521
采用NI PXI
平台
实现模块化电子战
模拟
系统
2019-07-19
1477
发帖
登录/注册
20万+
工程师都在用,
免费
PCB检查工具
无需安装、支持浏览器和手机在线查看、实时共享
查看
点击登录
登录更多精彩功能!
首页
论坛版块
小组
免费开发板试用
ebook
直播
搜索
登录
×
20
完善资料,
赚取积分


 举报
举报