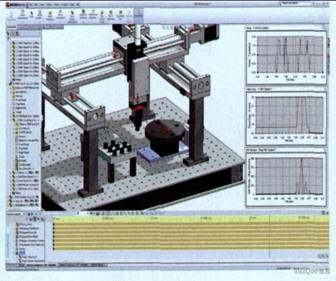
目前为止,我们只考虑了机械与电机工程师,而机电一体化设计模式是关于并行工作的三个工程团队。那么虚拟原型技术如何帮助控制工程师?我们已经看到了虚拟机械如何在CAD系统下被驱动,但是控制工程师想要的是一个虚拟控制器,能够直接与CAD几何图形对话并驱动运动分析(图4),如同用于SolidWorks的LabVIEW NI SoftMotiON所能实现的。
目前为止,我们只考虑了机械与电机工程师,而机电一体化设计模式是关于并行工作的三个工程团队。那么虚拟原型技术如何帮助控制工程师?我们已经看到了虚拟机械如何在CAD系统下被驱动,但是控制工程师想要的是一个虚拟控制器,能够直接与CAD几何图形对话并驱动运动分析(图4),如同用于SolidWorks的LabVIEW NI SoftMotiON所能实现的。


 举报
举报